 偏振裝置非理想性對系統探測能力的影響
偏振裝置非理想性對系統探測能力的影響
在背景與目標紅外輻射量差距不大或背景較為復雜等情況下,傳統紅外成像技術對目標進行探測與識別的難度較大。而紅外偏振探測在采集目標與背景輻射強度的基礎上,還獲取了多一維度的偏振信息,因此在探測隱藏、偽裝和暗弱目標和復雜自然環境中人造目標的探測和識別等領域,有著傳統紅外探測不可比擬的優勢。但同時,偏振裝置的加入也增加了成像系統的復雜度與制作成本,且對于遠距離成像,在紅外成像系統前加入偏振裝置對成像系統的探測距離有多大的影響,也有待進一步的研究論證。
據麥姆斯咨詢報道,近期,中國科學院上海技術物理研究所、中國科學院紅外探測與成像技術重點實驗室和中國科學院大學的科研團隊在《紅外與毫米波學報》期刊上發表了以“考慮探測器非理想性的紅外偏振成像系統作用距離分析”為主題的文章。該文章第一作者為譚暢,主要從事紅外偏振成像仿真方面的研究工作;通訊作者為王世勇研究員,主要從事紅外光電系統技術、紅外圖像信號處理方面的研究工作。
本文將從分析成像系統最遠探測距離的角度出發,對成像系統的探測能力進行評估。綜合考慮影響成像系統探測能力的各個因素,參考傳統紅外成像系統作用距離模型,基于系統的偏振探測能力,建立了紅外偏振成像系統的作用距離模型,討論了偏振裝置非理想性對系統探測能力的影響,并設計實驗驗證了建立模型的可靠性。
紅外成像系統作用距離建模
目前較為公認的對擴展源目標探測距離進行估算的方法是MRTD法。該方法規定,對于空間頻率為f的目標,人眼通過紅外成像系統能夠觀察到該目標需要滿足兩個條件:①目標經過大氣衰減到達紅外成像系統時,其與背景的實際表觀溫差應大于或等于該頻率下的成像系統最小可分辨溫差MRTD(f)。②目標對系統的張角θT應大于或等于相應觀察要求所需要的最小視角。
只需明確紅外成像系統的各項基本參數與觀測需求,我們就可以計算出系統的噪聲等效溫差與最小可分辨溫差,進而求解出它的最遠探測距離。
紅外偏振成像系統作用距離建模
偏振成像根據成像設備的結構特性可分為分振幅探測、分時探測、分焦平面探測和分孔徑探測。其中分時探測具有設計簡單容易計算等優點,但只適用于靜態場景;分振幅探測可同時探測不同偏振方向的輻射,但存在體積龐大、結構復雜,計算偏振信息對配準要求高等問題;分孔徑探測也是同時探測的一種方式,且光學系統相對穩定,但會帶來空間分辨率降低的問題;分焦平面偏振探測器具有體積小、結構緊湊、系統集成度高等優勢,可同時獲取到不同偏振方向的偏振圖像,是目前偏振成像領域的研究熱點,也是本文的主要研究對象。圖1為分焦平面探測系統示意圖。
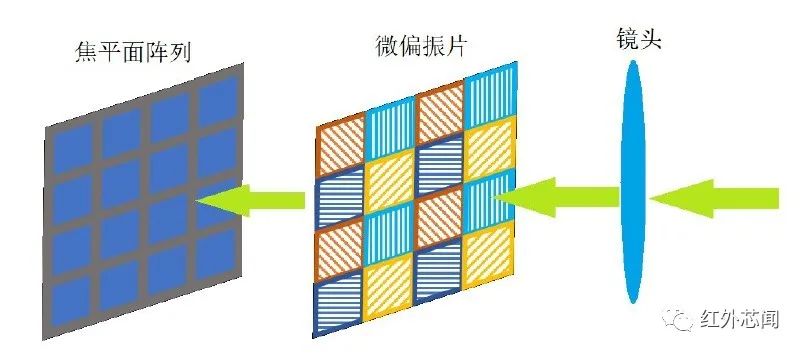
圖1 分焦平面探測器系統示意圖
本文仿真的分焦平面偏振探測器,是在紅外焦平面上集成了一組按一定規律排列的微偏振片,一個像元對應著一個微偏振片,其角度分別為 0°、45°、90°和135°,相鄰的2×2個微像元組成一個超像元,可同時獲取到四種不同的偏振態。圖1為分焦平面探測系統結構示意圖。
傳統方法認為在紅外成像系統前加入偏振裝置后,會對系統的噪聲等效溫差與調制傳遞函數MTF(f)產生影響,改變系統的最小可分辨溫差,進而改變系統的最遠探測距離。本文將從偏振裝置的偏振探測能力出發,分析成像系統的最小可分辨偏振度差,建立紅外偏振成像系統的探測距離模型。
我們首先建立一個探測器偏振響應模型,該模型將探測器視為一個光子計數器,光子被轉換為電子并在電容電路中累積,綜合考慮探測器井的大小、偏振片消光比、信號電子與背景電子的比率以及入射輻射的偏振特性,通過應用誤差傳播方法對結果進行處理。從噪聲等效偏振度(NeDoLP)的定義出發,NeDoLP是衡量偏振探測器探測能力的指標,即探測器對均勻極化場景成像時產生的標準差。對其進行數學建模,進而分析得到紅外偏振成像系統的最遠探測距離。
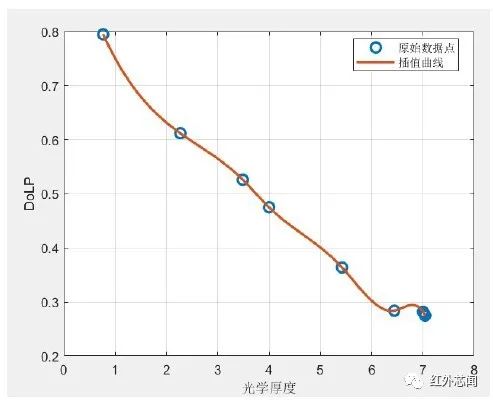
圖2 DoLP隨光學厚度變化曲線
對于探測器來說,積分時間越長,累積的電荷越多,探測器的信噪比(SNR)就越高,但這種增加是有限度的。隨著積分時間的增加,光生載流子有更多的時間被收集,增加信號。然而,同時,暗電流及其相關噪聲也會增加。對于給定的探測器,最佳積分時間是在最大化信噪比和最小化暗電流及噪聲的不利影響之間取得平衡,為方便分析,我們假設探測器工作在“半井”狀態下。
通過以下步驟計算紅外偏振成像系統最遠作用距離:
a. 根據已知的目標和背景偏振特性以及環境條件,計算在給定距離下,目標與背景之間的偏振度差在傳輸路徑上的衰減。
b. 結合系統的探測器性能參數,確定目標在給定距離下是否可被觀察到。如果不能則減小設定的距離。目標被觀察到需同時滿足衰減后的偏振度差大于或等于系統對應于該頻率的最小可分辨偏振度差MRPD,目標對系統的張角θT大于或等于相應觀察要求所需要的最小視場角。
c. 逐步增加距離,直到目標與背景之間的偏振度差不再滿足觀察要求。這個距離即為成像系統最遠作用距離。
τp (R)為大氣對目標偏振度隨探測距離的衰減函數,可根據不同的天氣條件,根據已有的測量數據進行插值,計算出不同探測距離下大氣對目標偏振度的衰減,圖4. 5給出了根據文獻中測量數據得到的偏振度隨光學厚度增加衰減關系圖。
這里給出的橫坐標是光學厚度,不同天氣條件下,光學厚度對應的實際傳播距離與介質的散射和吸收系數有關。
綜上,我們建立了傳統紅外成像系統和考慮了偏振片非理想性的紅外偏振成像系統的作用距離模型,下面我們將對模型的可靠性進行驗證,分析討論探測器各參數對成像系統探測能力的影響。
驗證與討論
由噪聲等效偏振度的定義可知,其數值越小,代表偏振探測器的性能越優秀。下面我們對影響紅外偏振成像系統探測性能的各因素進行討論,并設計實驗驗證本文建立模型的正確性。
偏振片消光比
消光比是衡量偏振片性能的重要參數,市售的大面積偏振片的消光比可以超過200甚至更多。對其他參數按經驗進行賦值,從圖3可以看到,對于給定設計參數的探測器,偏振片消光比超過20后,隨著偏振片消光比的增加,探測器性能上的提升微乎其微。對于分焦平面探測器,為實現更高的消光比,不可避免地要犧牲探測器整體輻射通量。由于輻射通量降低而導致的信噪比損失可能遠遠超過消光比增加所獲得的收益。這一結果同樣可以對科研人員研制偏振片提供啟發,對需要追求高消光比的偏振片來說,增大透光軸方向的最大透射率要比降低最小透射率更有益于成像系統的性能。
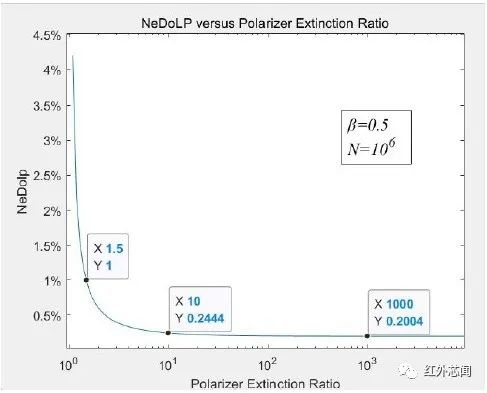
圖3 偏振片消光比與探測器噪聲等效偏振度關系圖
探測器井容量
紅外探測器的井容量是指探測器像素在飽和之前能夠累積的電荷數量的最大值。井容量是衡量紅外探測器性能的一個關鍵參數,井容量通常以電子數(e-)表示。較大的井容量意味著探測器可以在飽和之前存儲更多的電荷,從而能夠在更大的亮度范圍內準確檢測信號。這對于在具有廣泛亮度變化的場景中捕獲清晰圖像至關重要。從圖4可以看出,增大探測器井的容量,同樣能很好的提高成像系統的偏振探測能力。
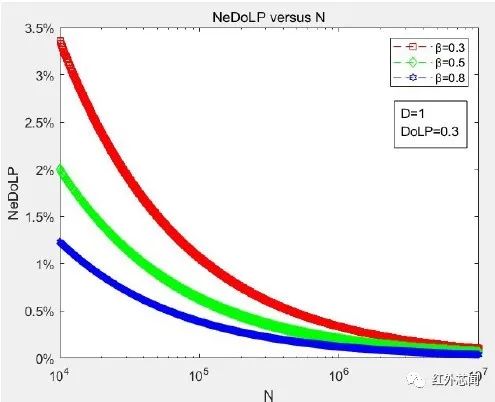
圖4 探測器井容量與探測器噪聲等效偏振度關系圖
然而,井容量的增加可能會導致像素尺寸增大或探測器面積減小,這可能對系統的整體性能產生負面影響。因此,在設計紅外探測器時,需要權衡井容量、像素尺寸和其他性能參數,以實現最佳性能。
目標偏振度
雖然推導出的噪聲等效偏振度公式包含目標偏振度這一參量,但目標的偏振度本身對探測器的噪聲等效偏振度沒有直接影響。NeDolp 是一個衡量探測器性能的參數,它主要受探測器內部噪聲、電子學和其他系統組件的影響。然而,目標的偏振度會影響探測器接收到的信號強度,從而影響信噪比(SNR)。從圖5也可以看出,探測器的NeDolp受目標的偏振度影響不大。
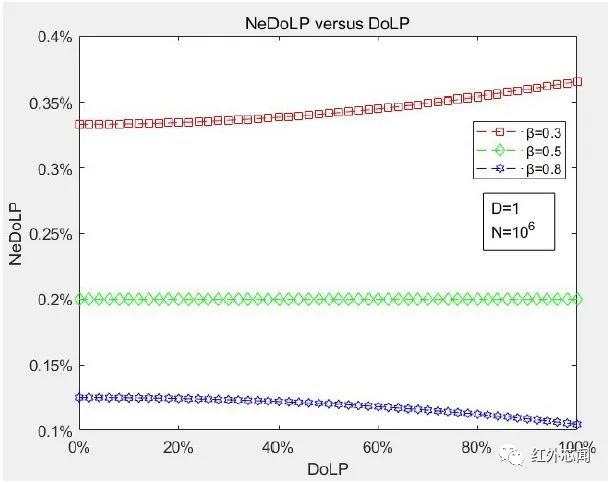
圖5 目標偏振度與探測器噪聲等效偏振度關系圖
讀取噪聲與產生復合噪聲比值
讀取噪聲主要來自于探測器的讀出電路、放大器和其他電子元件。它通常在整個光強范圍內保持相對恒定。產生復合噪聲是由光子的隨機到達和電荷生成引起的,與光子數成正比。在低光強下,產生復合噪聲通常較小;而在高光強下,它會逐漸變大。通過計算讀取噪聲和產生復合噪聲的比值,可以確定系統的性能瓶頸。如果讀取噪聲遠大于產生復合噪聲,這意味著系統在低光強下受到讀取噪聲的限制。在這種情況下,優化讀出電路和放大器等元件可能會帶來性能提升。如果產生復合噪聲遠大于讀取噪聲,這意味著系統在高光強下受到產生復合噪聲的限制。在這種情況下,提高信號處理和光子探測效率可能有助于改善性能。從圖6可以看出,降低讀取噪聲與產生復合噪聲比值可以有效提升系統偏振探測能力。
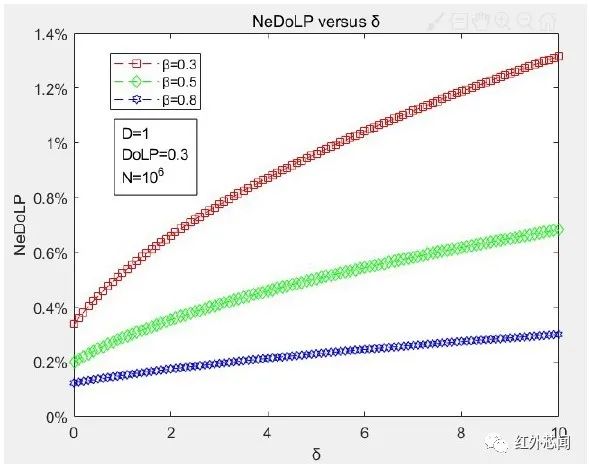
圖6 δ與探測器噪聲等效偏振度關系圖
信號電子比例
綜合圖4~6可以看出,提升β的數值可有效提高探測器的偏振探測能力,由β的定義可知,對于確定井容量的探測器,β的取值主要取決于探測器的各種噪聲與積分時間,降低探測器的工作溫度、優化探測器結構、減少表面和界面缺陷等途徑都可以降低探測器的噪聲,調節合適的積分時間也有助于探測系統的性能提升。
實驗驗證
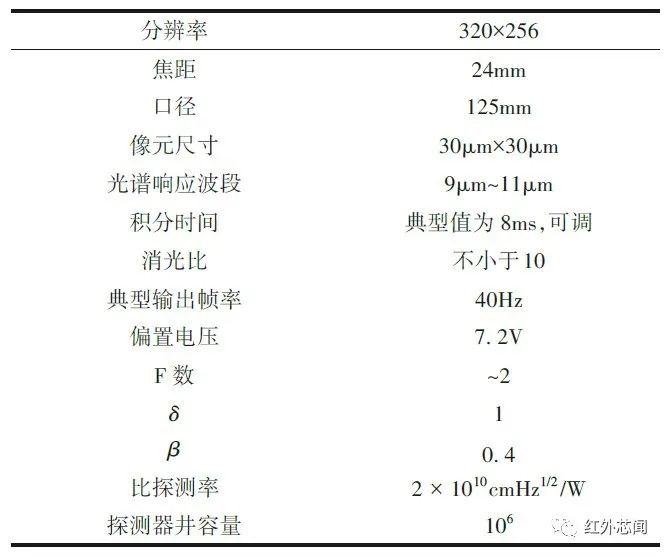
根據噪聲等效偏振度的定義,利用面源黑體與紅外可控部分偏振透射式輻射源創建一組均勻極化場景。如下圖7所示,黑體發出的紅外輻射,經過兩塊硅片,發生四次折射,產生了偏振效應,通過調節硅片的角度,即可產生不同線偏振度的紅外輻射。以5°為間隔,將面源黑體平面與硅片間的夾角調為10°~40°共七組。每組將面源黑體設置為40℃和70℃兩個溫度,用國產自主研制的紅外分焦平面偏振探測器采取不少于128幀圖像并取平均,然后將每組兩個溫度下相同角度獲得的圖像作差,以減少實驗裝置自發輻射和反射輻射對測量結果的干擾,差值圖像就是透射部分的紅外偏振輻射。對差值圖像進行校正和去噪后,即可按公式計算出探測器對均勻極化場景產生的偏振度圖像。計算出紅外輻射的線偏振度,為減小測量誤差,僅取圖像中心區域的像元進行分析。該區域像元的標準差就是該成像系統的噪聲等效偏振度(NeDoLP)。探測器具體參數如表1所示。
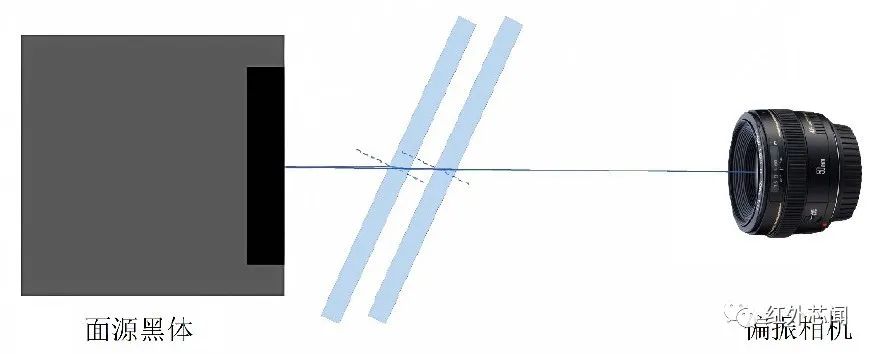
圖7 實驗示意圖
表1 偏振探測器參數
利用本文建立的探測器仿真模型計算出硅片的線偏振度仿真值,公式19計算出硅片線偏振度的理論值,與實驗的測量值進行對比,圖8展示了三組數據的變化曲線,從圖中可以看出,三組數據存在一定偏差,這可能與硅片調節角度誤差、面源黑體穩定性、干涉效應、硅片擺放是否平行等因素有關,但在誤差允許的范圍內,實驗驗證了偏振探測系統的性能,也證明了本文建立仿真模型的可靠性。NeDoLP測量結果如表2所示。
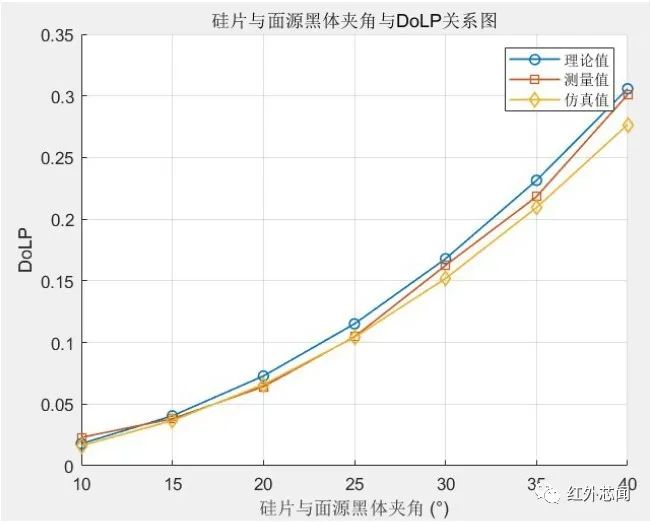
圖8 線偏振度理論值、測量值與本文模型仿真值曲線圖
表2 實驗結果
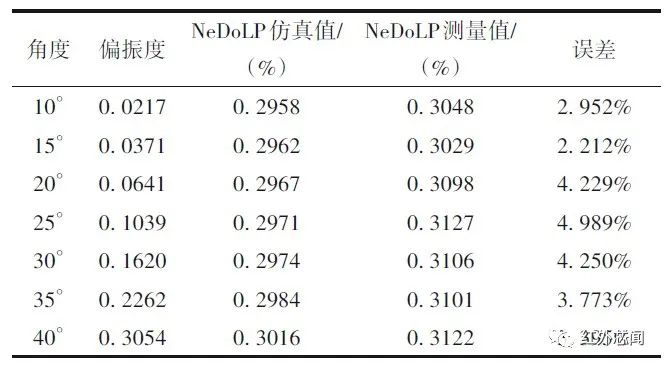
從上表可以看到NeDoLP的測量值與仿真值的差值基本能控制在5%以內,實驗結果再次印證了本文設計的模型的可靠性。
實例計算
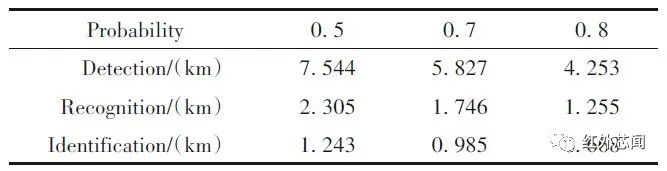
應用建立的模型對高2.3m,寬2.7m,溫度47℃,發射率為1的目標的最遠探測距離進行預測,目標差分溫度6℃;背景溫度27℃;發射率1;目標偏振度30%,背景偏振度1%,使用3.2節中樣機的探測器參數,最后,采用文獻中介紹的“等效衰減系數-距離”關系的快速逼近法對紅外探測系統最遠作用距離R進行求解,得到表3的結果。
表3 紅外成像系統的最遠作用距離
根據紅外探測系統最遠探測距離,利用本文第二節提出的方法,得到不同探測概率下紅外偏振成像系統最遠作用距離結果如表4所示。
表4 紅外偏振成像系統的最遠作用距離
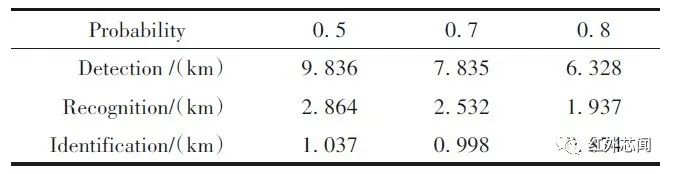
所選例子為目標與背景偏振度差異大于其溫差,所以在這種探測場景下紅外偏振成像系統的探測能力要優于紅外成像系統。探測器的參數不同,探測場景與目標的變化都會對模型的結果產生影響,但本文提供的成像系統作用距離模型可為實際探測中不同應用場景下的成像系統選擇提供參考。
結論
針對不同的探測場景,紅外成像系統與紅外偏振成像系統在最遠探測距離方面哪個更有優勢并沒有定論,探測目標的大小,背景與目標的溫差與偏振度差,大氣透過率,具體探測器的參數等因素都會對成像系統的最遠探測距離產生影響。經實驗驗證,本文所建立的非理想紅外偏振成像系統的響應模型是可靠的,可以用于估算成像系統的最遠作用距離,針對不同的探測場景,讀者可通過實驗確定探測器的具體性能參數,利用仿真軟件或實驗測量的方式獲取探測目標的溫度與偏振信息,明確探測環境的具體大氣參數,利用模型對紅外成像系統與偏振成像系統的最遠作用距離進行預估,選擇更具優勢的成像系統。
這項研究獲得上海市現場物證重點實驗室基金(No. 2017xcwzk08)和上海技術物理研究所創新基金(No. CX-267)的資助和支持。
審核編輯:彭菁
-
紅外探測
+關注
關注
1文章
47瀏覽量
11061 -
成像系統
+關注
關注
2文章
195瀏覽量
13924 -
成像設備
+關注
關注
0文章
41瀏覽量
18231
原文標題:考慮探測器非理想性的紅外偏振成像系統作用距離分析
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
偏振分色
用于光波導系統的均勻性探測器
偏振片助陣機器視覺成像系統,提高圖像質量
基于大氣背景抑制的偏振去霧算法
北方廣微與西工大聯合推出非制冷紅外偏振焦平面探測器,有何特點
多角度偏振成像儀面陣探測器響應非均勻性多參量校正取得新進展
羅軍華團隊開發高性能偏振光探測器

廣西大學主導研制的X射線偏振探測立方星成功發射



在高維光場探測領域取得突破性進展





 工商網監
工商網監
評論