

一、背景
前文《深度剖析GNSS高精度定位原理》介紹了高精度衛星定位技術相關原理,本文繼續展開介紹RTK定位原理及誤差解析。目前主流民用衛星定位技術在城市這種復雜場景下的定位精度通常為幾米到幾十米,而實現一些特殊應用的理論定位精度要逼近厘米級。那么該如何實現定位精度數量級的提升?
我們不妨從定位信號的整個生命周期去考慮精度問題,如圖1為衛星信號從衛星發射到接收機接收的整個傳播路徑。我們可以將該路徑內的誤差來源分為三類:與衛星有關的誤差,例如衛星軌道誤差、衛星星歷數據誤差、衛星鐘差等;與傳播路徑相關的誤差,例如電離層/對流層延時、多路徑效應等;與接收設備有關的誤差,例如接收機鐘差、接收機內部噪聲等,還有一些影響較小的誤差比如相對論效應、潮汐效應、測量噪聲等。
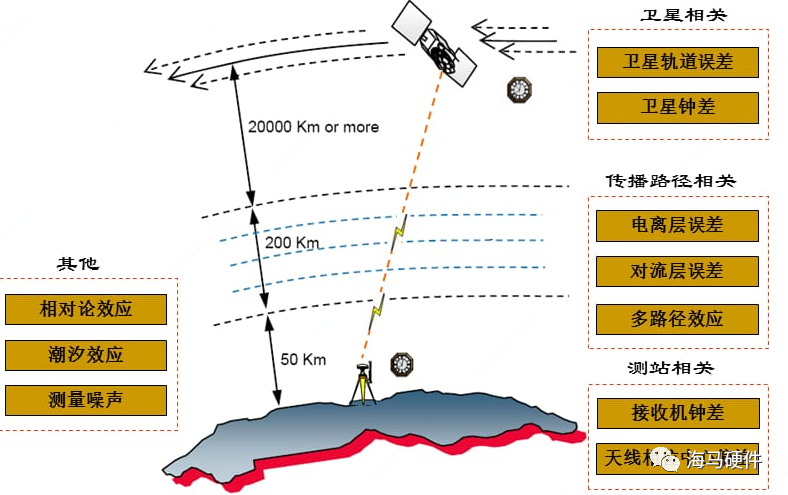
圖1定位誤差
雖然以上誤差來源較多,但經過模型修正后,可在一定程度上抑制噪聲,當我們去量化這些噪聲時,我們可以得到如圖2所示的噪聲分布(限定為復雜場景)。可以看出,對我們室外場景定位精度影響最大的是傳播路徑相關的誤差,例如在一些遮蔽環境內(單/雙邊樓、立交橋下等),我們的設備收到的衛星信號受遮擋、多路徑效應影響較深,信號質量較差,自然就無法進行有效定位。
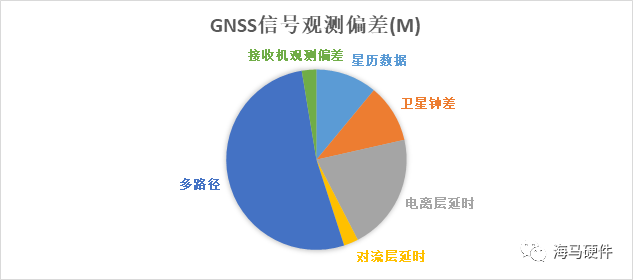
圖2 GNSS信號觀測偏差
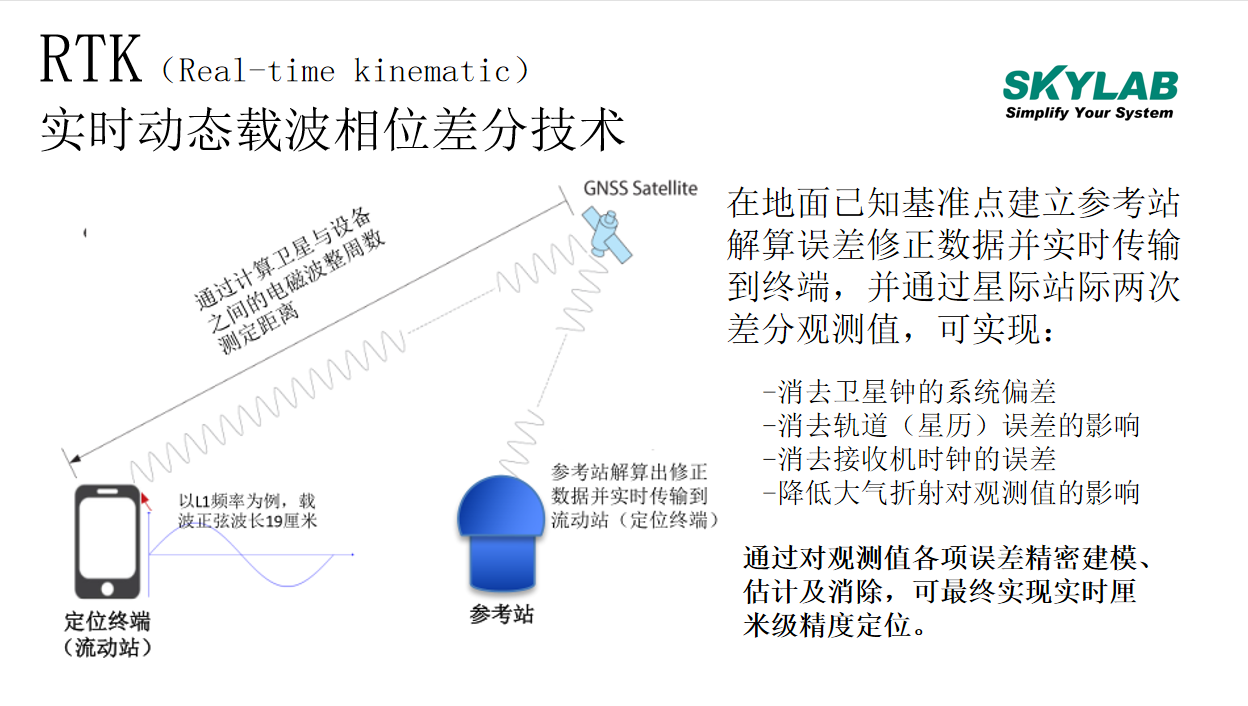
為了盡可能提升定位精度,我們引入RTK定位技術,RTK定位技術憑借著基準站的引入,可以在一定程度上降低環境對定位的影響,同時減少星歷數據、衛星鐘差、電離層延時、對流層延時引起的定位誤差。但RTK并不是萬能的,雖然其定位精度可達到厘米級,但并不意味著其定位精度時時刻刻都保持厘米級,那究竟是為什么?本文筆者將從原理出發,淺析RTK定位技術的關鍵技術及其誤差來源。
2、RTK定位技術原理
本章將從RTK定位系統組成原理及RTK定位算法實現原理兩個方面去嘗試解析RTK定位技術的相關原理性內容。
2.1 RTK定位系統組成原理
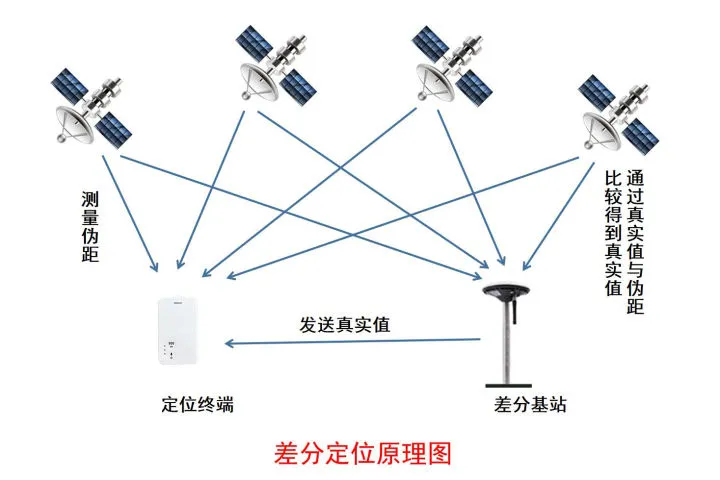
RTK定位技術(Real Time Kinematic)本質是一種GNSS(全球導航衛星系統, Global Navigation Satellite System)網絡載波相位差分定位技術,其定位精度通常可達到厘米級。在實際應用中,基于RTK定位技術的定位系統通常由三部分組成:基準站、差分數據通信鏈、移動站。其中,基準站通常架設在高精度與高可靠性的已知點上,提供質量較好的GNSS觀測信號;差分數據通信鏈通常為4G/5G網絡或電臺等;移動站為終端設備(待測設備)。RTK定位系統的定位過程可概括為:基準站首先將自己觀測的GNSS載波相位觀測值及站點坐標,通過數據通信鏈實時發送給周圍工作的移動站。移動站數據處理模塊使用動態差分定位的方法確定移動站相對基準站的坐標,然后根據基準站的坐標反算自身的瞬時坐標,即可獲得最高厘米級精度的位置坐標。上述內容有些晦澀難懂,那我們不妨用一張圖片(圖3)試著闡述一下RTK定位系統的定位過程。
我們假設小綠和小橙是一對好朋友,有一天他倆一起相約去郊外寫生,突然他們看到遠處的摩天輪非常好看,他們決定把這個摩天輪畫下來。但這難倒了小綠,因為他有500°的近視,而且又沒戴眼鏡,完全看不清摩天輪的細節。正當小綠犯難時,小橙靈機一動告訴阿綠一個絕佳的方法。小橙說:“我視力非常好,看的清摩天輪的細節,不如我大聲告訴你摩天輪有什么內容,你在你模模糊糊看到的摩天輪的基礎上,依據我說的內容去豐富一下細節吧!”就這樣,兩人順利完成了對摩天輪的寫生。
圖3小綠和小橙
在上面的這個例子中,小橙扮演的角色就是RTK定位系統中基準站的角色,而小綠扮演的就是移動站的角色,兩人交流的聲音其實扮演的是差分數據通信鏈的角色,看清摩天輪的細節其實類比了基準站/移動站觀測衛星的行為,小綠對摩天輪的寫生過程類比了RTK定位系統的定位過程。通過上面的例子可以看出,流動站(也就是我們的設備)往往在城市中定位時很難有效地觀測衛星,也就是說觀測值往往都攜帶著一些誤差,很像近視的同學摘掉眼鏡看到的世界--不能說是看不到,只是看不清;那基準站的作用就是請一個視力很好的同學去觀測同一個物體,在RTK定位系統中,“視力很好”其實代指觀測能力強,觀測能力強不僅體現在基準站硬件性能較好,而且基準站一般放置于空曠地帶,以期獲得更好的“視力”。
2.2 RTK定位算法實現原理
本節我們RTK算法為基礎,從工程實現的角度去討論RTK定位算法的實現原理,RTK定位算法流程如圖4所示。

圖4-RTK定位算法流程圖
①共星選擇
共星選擇本質上是對基準站、移動站與衛星星歷三者間接收到的有效衛星集合做交集,其中有效衛星是指衛星信號的信噪比、周跳等信息符合要求。舉個例子,基準站接收到1、2、3、4、5號衛星,移動站接收到1、2、3號衛星,衛星星歷有1、2、3、4號衛星,那么共星選擇得到的結果即為1、2、3號衛星。關于衛星星歷的相關概念,可以參考
https://zhuanlan.zhihu.com/p/401508120
②單差/雙差計算
單差計算是指基準站與移動站在單一時刻對同一顆衛星測量值的一次差分,其目的是用來根除測量值中的衛星鐘差、衛星端硬件延遲等,同時在一定情形下,可以基本消除大氣延時誤差。這么說可能比較抽象,我們用圖5說明單差是如何計算的。
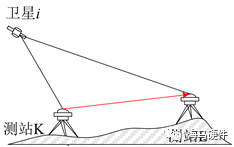
圖5-單差示意圖
圖6中,測站點K是我們的基準站,測站點L是我們的移動站。從圖中可以理解上述提到的基準站與移動站在單一時刻對同一顆衛星進行測量,那么什么是差分?以及差分能夠得到什么?這需要從一個觀測方程說起。設在綜合考慮各項誤差的條件下,載波相位觀測方程如圖4所示:
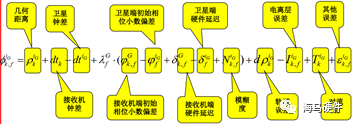
圖6-載波相位觀測方程表達式
因此,不同的站點對同一顆衛星都可以構建一個載波相位觀測方程,進一步地,測站點K與測站點L載波相位觀測方程做差,可以得到如圖6所示方程。
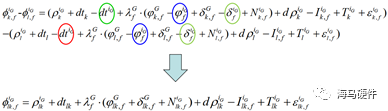
圖7-單差載波相位觀測方程
可以看到,衛星鐘差、衛星端硬件延遲等可以被消除。我們不妨抽象一下,假設載波相位觀測方程表達式是一個一元一次線性方程:
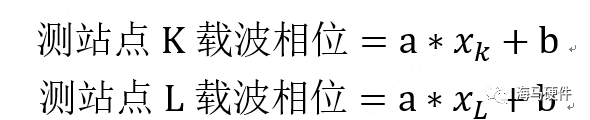
測站點K與L做差:

參數b就被消除掉了。因此,我們可以看出,單差或者說是差分技術在RTK領域的作用是消除一些不重要的誤差項。
與單差計算類似,雙差計算涉及兩個接收機在同一時刻對兩個衛星的測量值,它對兩個不同衛星的單差之間進行差分,可以消除接收機鐘差等,其示意圖如圖8所示。
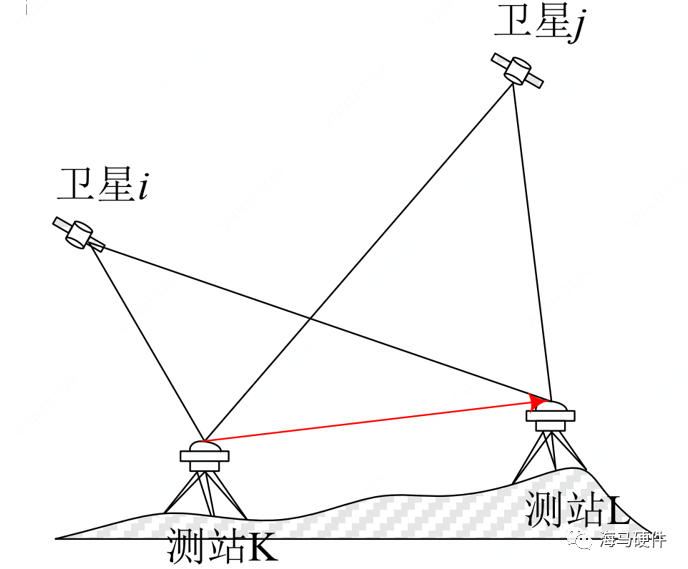
圖8-雙差示意圖
③整周模糊度解算與RTK算法解的形式
整周模糊度又稱整周未知數,是RTK定位算法求解中的重中之重,本節僅從原理層面出發嘗試闡明整周模糊度的基本概念及其與RTK算法解的形式之間的關聯。首先,我們需要明確一點,載波、信號、相位、相位差四者之間的聯系與差異。載波在本文中指的是通信領域的載波,其通常為一個固定頻率的波,并無實際意義,只有當信號(說成信息更為準確)加載到載波上(稱為載波調制),載波變成調制波后才具備一定的意義。舉個例子,載波像是一輛自行車,信號就像是騎行人,如果沒有人騎這輛車,那么這輛車不會產生任何價值,只有當騎行人騎上了這輛車,車的載體意義才會被凸顯。相位是指一個波在特定時刻在它循環中的位置,相位差是指兩個波相位間的差值。同樣的舉個例子,小綠和小橙每天都上班8小時,小綠早上九點到公司上班,下午五點下班,在這個循環里(9:00-17:00)任一時刻小綠的狀態都是他的相位,小橙九點半才到公司,所以小綠和小橙的相位差為半個小時。圖9表現了相位差的相關內容。
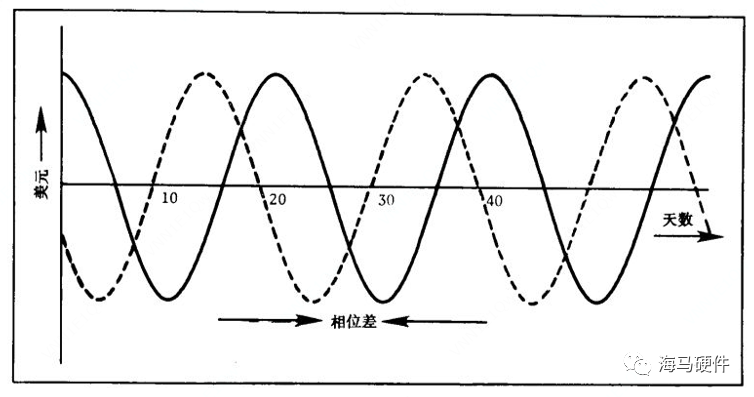
圖9-相位差
那整周模糊度與這些有什么關系呢?以GPS信號為例。首先,GPS信號是以載波的形式向外廣播的;其次,由于發送時刻與接收時刻間存在延時,即傳輸需要一定時間,所以接收到的信號相位是不一致的,這里就存在相位差,那么到底差多少就是整周模糊度求解的關鍵了。我們同樣舉一個例子:
GPS廣播的載波信號為正弦波,如圖10所示。假設S時刻為衛星廣播GPS信號的初始時刻,接收機1接收時刻為A時刻,A時刻對應的相位相距S時刻正好為一個周期的一半(正弦波中為180°),所以接收機與衛星相距半個載波波長;接收機2接收時刻為B時刻,B時刻與A時刻相似,同樣對應的相位相距S時刻正好為一個周期的一半,但B與S的距離不再是半個波長,而是(N+半個波長),這個N是個未知數,也就是我們要求解的整周模糊度。為什么這個整周模糊度求解那么重要呢?GPS雙頻信號中L1頻段載波頻率為1575.42MHz,L2頻段載波頻率為1227.60MHz,對應的波長為19cm與24.4cm,那么也就是說上述N這個未知數如果估算出現1的誤差,導致最終定位精度會損失幾十厘米,由此可見整周模糊度解算的重要程度。
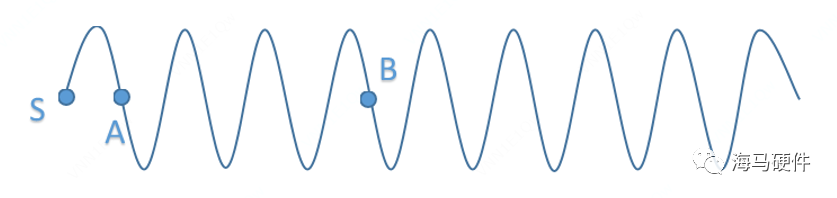
圖10GPS廣播的載波信號
進一步地,對RTK定位有所了解的同學知道RTK定位解的形式有三種,即為浮點解、固定解,浮點解精度通常為幾十厘米(分米級),固定解精度通常可達到厘米級。通過上面整周模糊度解算可以看出,當算法可以準確解算出(固定住)整周模糊度參數時,這時相位間引起的誤差通常為厘米級別,由此定位精度通常可達到厘米級,也就出現了固定解;當無法有效解算出(固定住)整周模糊度參數時,這時通常為浮點解。(注:單點解通常和浮點解、固定解同時被提到,但單點解不需RTK定位技術便可解出,其本質為衛星信號直接解出的定位結果,精度通常為幾米到幾十米。)
3、RTK定位誤差淺析
“RTK定位誤差為厘米級。”這句話不完全準確,RTK定位精度在有限條件下是可以達到厘米級精度,但如果你認為RTK定位時時刻刻都是厘米級精度,那可就走入了一個誤區。RTK定位誤差來源眾多,本章僅從RTK定位系統、衛星接收數量及質量兩個直觀方面去淺析RTK定位誤差。
3.1、RTK定位系統誤差淺析
我們回到圖1的那個例子,在那個場景中,如果小綠要實現最后對摩天輪的寫生,其實中間有很多條件必須要滿足。比如,小綠要明確聽得到小橙的指示才能完成寫生,這映射了實際RTK系統中的通信鏈路,假設小綠不僅眼睛近視,耳朵還不是很好使的話,自然就聽不到小橙的指示,在實際系統中,移動站有可能自身信號接收能力較差,尤其是我們的設備有時行駛到信號不好的地段,自然就收不到基準站廣播的信息,所以也就無法進行后續的定位解算;假設小橙小綠所處環境非常嘈雜,小橙說的指示小綠很難聽得清,同樣也無法有效地完成寫生,在實際系統中,這種無法聽得清表征為信號的信噪比較小,及信號中混入了許多噪聲,導致解析時無法有效的復原GPS的信號,同樣導致無法進行后續的定位解算;假設上述兩個條件都不會發生,但小綠小橙兩人距離較遠,小橙看到并傳遞的是另一個地方的摩天輪的信息,那小綠接收的便是一個錯誤的信息,在實際系統中,基準站與移動站的距離通常限定在10公里之內,如果接收的基準站信息是10公里外的,那么基準站觀測的衛星數據便不可再作為移動站的參考,系統會默認沒有收到基準站數據,自然也無法進行后續的位置解算。所以,RTK定位系統是一個嚴謹、精密的定位系統,任何一個點出現異常都會導致最終的定位精度陡降。
3.2、衛星接收數量及質量的影響
衛星的接收數量直接影響了定位的精度。我們嘗試用一個例子去闡明這背后的邏輯。假設小綠所處一個完全陌生的環境,他不知道自己所在的位置,但他可以獲得小橙們的位置,這個時候怎么才能通過小橙們的位置獲取自己的位置?小綠想到一個好辦法,他要求小橙們依次進行鼓掌,通過聲音的差異,反推自己位置。假設每個小橙相距1米。當1、8號小橙時,小綠通過聲音得知自己的位置在1號、8號中間,也就是1米-8米之間的任意一點,此時他的定位精度為8米,當小橙越來越多時,即1號到8號間每一米都有一個小橙,此時小綠判斷他處于4號、5號小橙中間,此時定位精度可提升至1米。由此可見,小橙越多,分布的越細密,小綠的定位精度則越高。同理,在RTK定位中,衛星數量越多,可構建的單差、雙差則越多,定位精度自然就會得到相應的提升。
講完了衛星數量的重要性,那我們開始探討一下收到衛星數量的約束條件。眾所周知,例如GPS衛星、北斗衛星時時刻刻都在設定的軌道內圍繞著地球做周期運動。在我們的接收設備中,總計可接收不超過32顆GPS衛星的相關信息、64顆北斗衛星的相關信息等。但這并不意味著,我們的接收設備可以時時刻刻都收到這么多衛星的相關信息。舉個例子,我們白天可以看到太陽,晚上可以看到月亮是因為太陽與月亮只有在特定時刻才會出現在我們的上空,衛星同理,只有當衛星處于接收機上空時,才可能收到這顆衛星的相關信息,所以在不同時刻收到的衛星數量是動態的,或多或少。
那么當衛星正好處于接收機上空時,就一定能收到這顆衛星的相關信息嘛?答案是否定的。通過上一節,我們知道GPS信號的載波波長為十幾厘米,通常GPS衛星高度為2萬千米,也就是說,當GPS衛星廣播一條信息時,這個波長僅為十幾厘米的波需要歷盡電離層、對流層、云層等等“磨難”才能來到你身邊,且必須具備足夠的“能量”才能被接收機感知到,假設在傳輸路徑中遇到一些遮擋,那接收機自然就無法有效接收到相關信息。這像極了唐僧師徒四人去西天取經,如果路上哪個妖怪一不小心把唐僧給吃了,那這個取經團隊自然就無法取得真經。
如果可以收到一些衛星的信息,那么定位精度一定會高嗎?換句話說就是接收到的衛星信息一定是有效的嘛?答案依舊是否定的。我們知道,在室內、隧道里等等遮蔽環境下,衛星定位通常會失效,因為衛星信號極難穿墻,所以基本上無法接收到衛星信號。定位設備應用場景通常為城市,在城市中會出現樓宇的遮擋,樹蔭的遮擋等等,這些因素都會導致接收的衛星信號質量較差,最終導致定位精度不高。進一步地,衛星的分布對定位精度也有很深的影響,在定位領域,通常使用幾何精度因子DOP值來衡量衛星的分布,如果DOP值不符合預期,定位精度自然很差。
通過上述淺析RTK定位系統、衛星接收數量及質量兩者對RTK定位精度的影響,可以看出,RTK定位通常可以在空曠、通信覆蓋較高的地段提供穩定、良好的定位精度,在一些復雜場景下,定位精度依舊無法達到厘米級。但可以通過軟硬件的優化,不斷地使復雜場景下的定位精度穩定、可控。
四、總結
本文從系統及算法工程實踐層面淺析了RTK定位原理,并對RTK定位的誤差進行簡單分析。RTK定位技術在實時高精度定位領域具有廣泛的應用前景,尤其在測繪、農業、建筑和自動駕駛等領域。通過理解RTK的原理、系統配置和誤差源,我們可以更好地應用這一技術,提高定位精度,滿足不同應用的需求。未來,隨著技術的不斷進步,RTK定位將繼續發展,為更多領域帶來精準的位置信息。
審核編輯:湯梓紅
-
定位技術
+關注
關注
7文章
298瀏覽量
25756 -
衛星定位
+關注
關注
6文章
98瀏覽量
18174 -
GNSS
+關注
關注
9文章
837瀏覽量
48988 -
RTK
+關注
關注
8文章
146瀏覽量
37975
原文標題:RTK定位原理及誤差淺析
文章出處:【微信號:海馬硬件,微信公眾號:海馬硬件】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
高精度定位技術RTK(實時動態定位:Real-TimeKinematic)
TAU1308 多系統 RTK 定位模塊

基于CORS系統的高精度RTK定位技術設計詳解
什么是RTK?支持RTK的高精度定位模塊有哪些?
如何對RTK高精度定位算法進行驗證
北斗RTK高精度定位技術原理及優勢
您了解RTK技術嗎?—— 揭秘GNSS中的定位技術

雙頻RTK定位技術原理及解決方案


GPS/北斗RTK差分定位系統的技術原理以及應用領域





 工商網監
工商網監

評論