 myArm 全新七軸桌面型機械臂
myArm 全新七軸桌面型機械臂
引言
在不斷演進的科技世界中,我們始終追求創新和卓越,以滿足客戶的需求并超越他們的期望。今天,我們很高興地宣布我們的最新產品——myArm 300 Pi,一款七軸的桌面型機械臂。這款產品的獨特之處在于其靈活性和可編程性,以及它的工作半徑和嵌入式控制主板的選擇。在本文中,我們將詳細介紹myArm 300 Pi的特性和功能,并將其與我們的六軸機械臂進行比較,以便您更好地理解我們的新產品以及它如何滿足您的需求。
Introduction
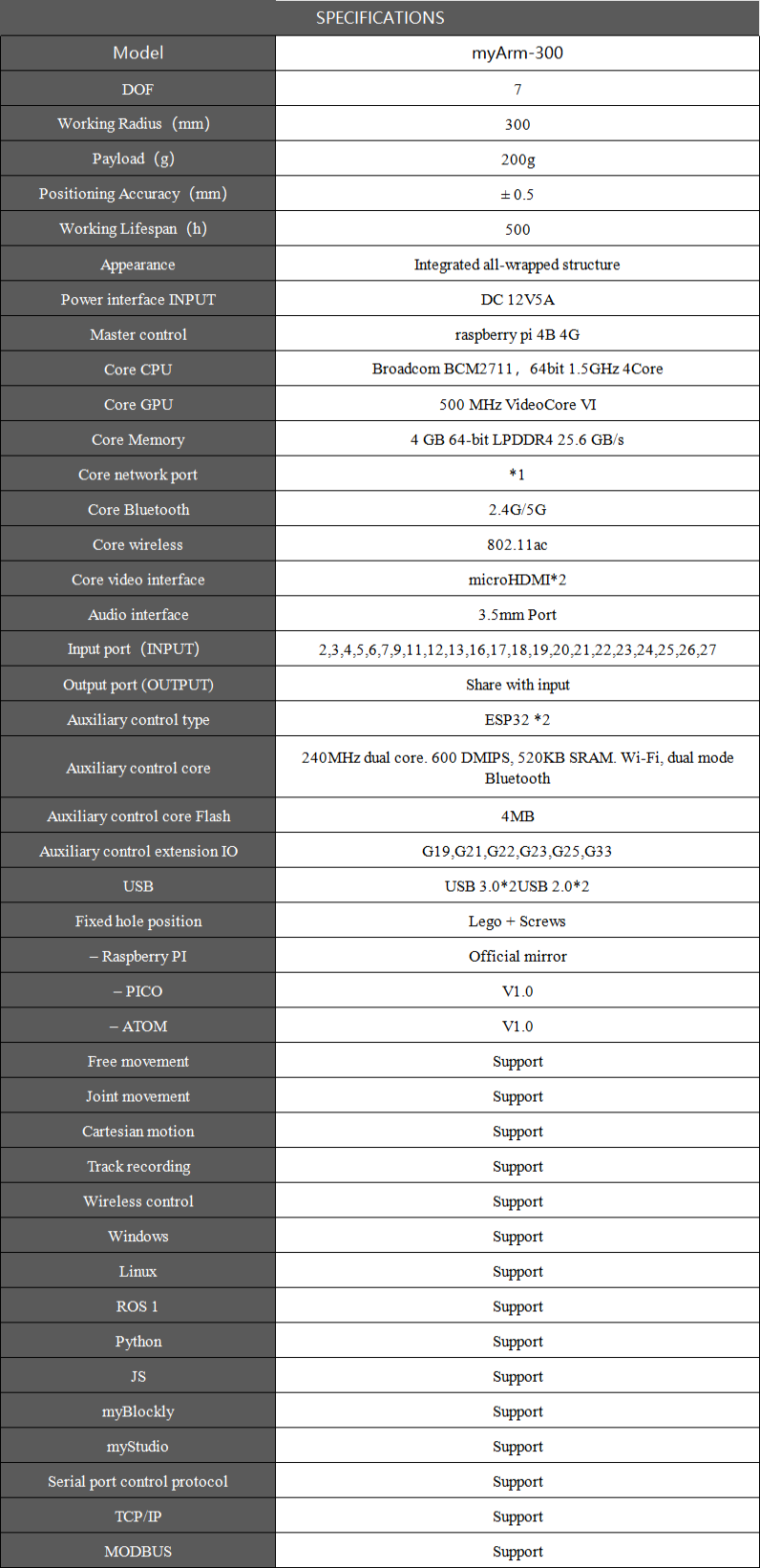
myArm 300 Pi是一塊全新的7自由度的中心對稱構型協作機械臂,設計風格延續了myCobot系列的小巧輕便的特點。myArm搭載著7個高精度的伺服電機,使得最大工作半徑300mm,末端最大負載成都能夠達到200g,重復定位精度最高達到了±0.5mm。

myArm 300 Pi的控制主板采用了樹莓派4B 4G,這是一種廣受歡迎的微型計算機,因其強大的性能和靈活的編程環境而備受贊譽。這意味著用戶可以使用多種編程語言來控制myArm 300 Pi,包括Python、C++、Java等,極大地提高了使用者的便利性和靈活性,它還支持ROS1/ROS2 在ROS操作系統中提供了許多功能,例如路徑規劃,避障,三維感知等。
可能你會問為什么要出一個7自由度的機械臂呢?6個自由度的機械臂不已經是模擬人們手臂的關節了嘛?接下來跟隨著我們一起來探討為什么要有7個自由度的機械臂。
6自由度的機械臂和7自由度的機械臂有什么區別?
接下來我們主要從四個方面來介紹6自由度的和7自由度的機械臂有什么區別。
自由度
顧名思義,從數量上七自由度的機械臂會比六自由度的機械臂多一個可以活動的關節。在大多數情況下,一個六軸機械臂具有完成其任務所需的最小自由度,三個自由度用于空間位置定位,另外三個自由度用于末端執行器的定位方向。而七軸機械臂是一個冗余的機器人,它同樣有3個軸用于定位,三個軸用于定向,多的一個軸通常用于提供更多的靈活性和運動自由度。(冗余機器人是指超過了完成特定的任務所需的最小的自由度的機器人)
復雜的動作
這兩種機械臂最大的一個特點是,7軸機械臂可以在做一些復雜的動作,保持末端的三維結構不變的情況下變換到另一個構型。而六軸機械臂是做不到的,六軸機械臂在同一個位置進行工作的時候,有時候會整個機械臂扭到另一邊。

就如圖中所顯示的一樣,只是簡單的平移一個位置,機械臂的整體會進行一個大的結構變化。這是因為6軸機械臂關節的限制所導致的一個結果。(圖中的是myCobot 280 一個六軸的機械臂)
我們再看myArm同樣的效果是怎樣的,保持機械臂末端的位置不進行大幅的改變。

這個動作是7軸機械臂能夠做到的特別的運動軌跡,另一種說法叫冗余機械臂,可以在保持末端坐標位置的同時,機械臂的整體可以進行大幅度的改變,這是6軸機械臂做所不到的復雜動作。還有一些特別的動作是7軸才能夠完成的,例如下圖的伸縮的軌跡。這使得myArm可以在更狹窄,更復雜的環境中工作。

應用的環境
六軸機械臂和七軸機械臂在大多數的場景下都能夠應付,例如工業生產,物流和倉儲,醫療領域,研究和開發,服務行業,教育等場景。
但是在一些 特定的場景當中使用7軸機械臂可以更加適合,主要是因為7軸機械臂有更大的靈活性和更復雜的運動能力。
復雜的路徑規劃:在需要機械臂沿著特定路徑(例如復雜的曲線或者在障礙物周圍)進行精確移動的情況下,7軸機械臂可能會比6軸機械臂更有優勢。這是因為額外的關節可以提供更多的運動自由度,使機械臂能夠在更復雜的環境中進行操作。
空間的利用率:在空間有限的環境中,例如在緊湊的工作站或者擁擠的工廠環境中,7軸機械臂可以更好地利用空間,執行更復雜的任務。額外的關節可以使機械臂在執行任務時采取更多的姿勢,從而在有限的空間內完成更多的工作。
精密操作:在需要進行精密操作的應用中,例如微創手術或者微電子設備的裝配,7軸機械臂可能會比6軸機械臂更有優勢。額外的關節可以提供更精確的控制,使機械臂能夠進行更精細的操作。
避障:7軸機械臂由于多出的一個自由度,使得在需要避開障礙物的場景中,7軸機械臂能夠更好地完成任務。例如,在復雜的工廠環境或者在需要避開人體進行手術的醫療環境。
控制和編程
控制
從正逆運動學的角度來說,正運動學是給定指定的機械臂的關節角度,計算機械臂末端的位置和方向的過程 ,在6軸和 7軸機械臂中,正運動學都是相對直接的,可以通過幾何和三角函數來解決。
逆運動學是指給定機械臂末端的目標位置和方向,計算需要的關節角度的過程。對于6軸機器人,逆運動學問題通常有唯一解(在某些特定位置可能有多解或無解)。然而,對于7軸機器人,由于有一個額外的自由度,逆運動學問題可能有無窮多個解。這就需要使用一些優化方法或啟發式方法來選擇最優的解,例如選擇最小化關節運動,避免關節極限,或者滿足其他一些特定的約束條件的解。所以會比六軸機械臂 要復雜的多。更多的自由度意味著需要更復雜的控制策略,設計和制造,計算需求等。
編程
mycobot280 有的編程環境,myArm300都能適配,他不僅僅支持ROS環境,還能通過python進行控制,你完全可以選擇你熟悉的編譯平臺,不需要在花費大量的時間去進行學習一門新的編譯語言。

大象機器人在最大的程度上提供了更用戶更多的可能。可以在各種平臺上進行開發,開放了許多的控制接口,例如力矩,扭矩等參數。
總結
在對比六軸和七軸機械臂的性能和功能后,我們可以看到myArm 300 Pi七軸機械臂的出色之處。七軸機械臂的一個顯著優點是其增強的靈活性和自由度,這使得它可以在更復雜、更狹窄的環境中工作,執行更為復雜的任務。相比之下,盡管六軸機械臂在許多應用中已經表現得足夠好,但在某些特定場景下,比如需要在狹窄空間內進行精細操作的情況,七軸機械臂的優勢就顯現出來。
此外,myArm 300 Pi七軸機械臂的樹莓派控制主板、開放的控制接口和ROS機器人操作系統使得它在編程靈活性和擴展性方面超越了傳統的六軸機械臂。這些特性使得myArm 300 Pi不僅適用于傳統的機械操作任務,也非常適合進行高級的機器人研究和開發。
我們希望更多的用戶能用myArm創作出更加有趣,有意義的項目,如果你想了解更多關于myArm的信息請點擊連接,如果有提議的請在下方留言,如果喜歡這篇文章請給我們點贊!
審核編輯 黃宇
-
機械臂
+關注
關注
12文章
515瀏覽量
24603 -
ROS
+關注
關注
1文章
278瀏覽量
17022
發布評論請先 登錄
相關推薦
RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!

機械臂的高效運作,連接器起關鍵作用
【原創】 drawbot 平面機械臂scara寫字畫畫機器人DIY教程貼
OrangePi AIpro應用:機械臂應用開發指南

工業機器人和機械臂的設計、功能和應用有哪些區別?
奧比中光推出2.0版大模型機械臂
大象機器人開源協作機械臂機械臂接入GPT4o大模型!

國產Cortex-A55人工智能教學實驗箱_基于Python機械臂跳舞實驗案例分享
基于六維力傳感器的機械臂自動裝配應用

大象機器人發布智能遙操作機械臂組合myArm M&C,加速具身智能研究與發展!

機械臂技術的前沿探索:年度案例回顧!
如何去提升機械臂的位置控制性能?

大象機器人六軸協作機械臂myCobot 320 進行手勢識別!

使用ChatGPT學習大象機器人六軸協作機械臂mechArm!






 工商網監
工商網監
評論