 匯編語言中常見的兩個指令
匯編語言中常見的兩個指令
push和pop
push和pop是用來操作棧的2個指令。
push寄存器:將一個寄存器中的數據入棧。
pop寄存器:出棧用一個寄存器接收數據。
assume cs:codesg ;cs寄存器指向該程序的首地址
codesg segment
mov ax,1000H ;將1000H送入寄存器ax,相當于ax=1000H
mov ss,ax
mov sp,0010H
mov ax,001AH ;將ax,bx賦值
mov bx,001BH
push ax
push bx ;將ax,bx入棧
sub ax,ax ;sub為減法指令,相當于ax=ax-ax
sub bx,bx
pop ax //將棧頂的數據送入ax,pop也有mov指令類似的功能
pop bx
codesg ends
end
該段代碼將10000H~10000FH這段空間當棧,初始狀態棧是空的。設置寄存器ax,bx的值,將ax,bx中的數據入棧,然后將ax,bx清零,從棧中恢復ax,bx原來的內容。
ax,bx,sp,cs為寄存器,ss為段寄存器。任意時刻CPU從CS*16+IP(這里cs和ip表示該寄存器的值)單元開始執行指令,所以設置cs:codesg。
任意時刻,ss*16+sp(這里ss和sp表示對應寄存器的值)對應的地址單元指向棧頂元素,所以程序里面設置ss=1000H,而不是ss=10000H。
下面看一下單步調試的結果:
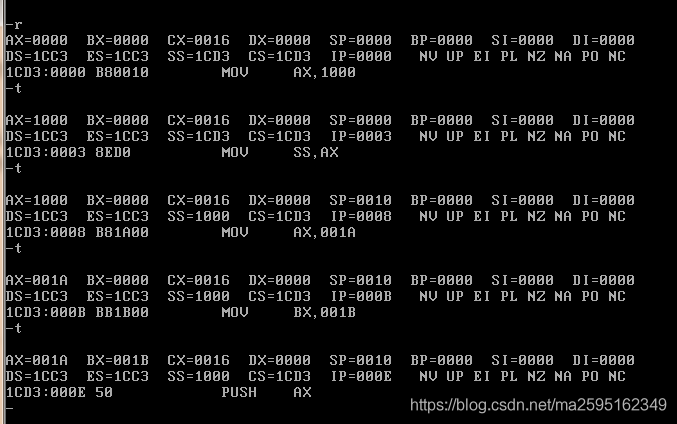
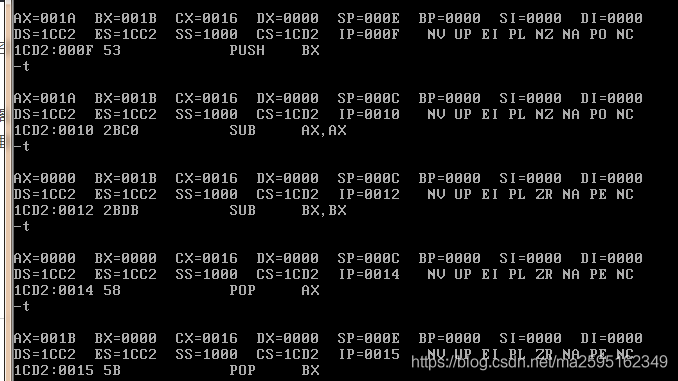
r命令時查看當前寄存器的內容,t是單步執行命令。每一步的執行結果中,上面是對應寄存器的值,下面對應的機器指令是下一條將要執行的機器指令。
每執行一條指令你都看到對應寄存器的變化。最后一條pop bx指令由于圖片大小原因,我沒有截出來,所以最后一行的結果只是執行pop ax,而沒有執行pop bx的結果。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
寄存器
+關注
關注
31文章
5336瀏覽量
120232 -
數據
+關注
關注
8文章
7002瀏覽量
88943 -
指令
+關注
關注
1文章
607瀏覽量
35694 -
匯編語言
+關注
關注
14文章
409瀏覽量
35793
發布評論請先 登錄
相關推薦
請問arm的匯編語言中有沒有什么指令可以達到上述效果的?
問題:單片機中的匯編語言可以用ORG指定外部中斷的標號地址比如:ORG0003HJMPINT_0那arm的匯編語言中有沒有什么指令可以達到上述的效果
發表于 06-27 05:02
MCS-51單片機匯編語言中的偽指令
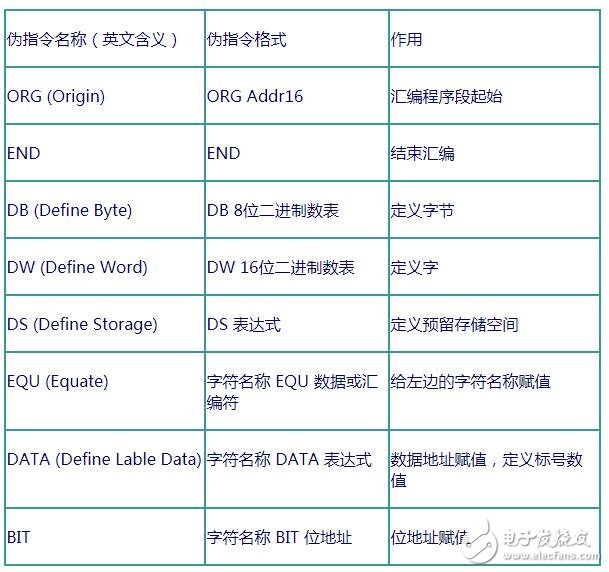
摘要:討論了MCS一51單片機匯編語言中的偽指令,并介紹若干主要的經常用到的偽指令使用方法。關鍵詞:單片機;偽指令;ORG;EQU;DB;DW;BIT
發表于 09-19 22:27
?120次下載
匯編語言詳解
匯編語言(Assembly Language)是面向機器的程序設計語言。
匯編語言中,用助記符(Memoni)代替操作碼,用地址符號(Symbol)或標號(Label)代替地址碼。這樣用符號代替機器
發表于 06-30 10:28
?4150次閱讀
Assemble匯編語言設計技術
匯編語言 設計程序,是所有程序語言的基本資源。我們不管你使用除匯編語言或指令代碼以外的程序語言編程,僅僅是編程表達、編程規則和變成環境的變化
發表于 07-07 15:47
?0次下載
匯編語言學習課件_匯編語言程序組織
第四章 匯編語言程序組織
4.1 匯編語言語句格式
4.2 匯編語言源程序結構
4.3 常用偽指令
4.4 匯編語言操作符
發表于 12-31 10:41
?0次下載


單片機匯編語言的結構/數據類型/匯編指令
開發匯編語言是為了為機器級代碼指令提供助記符或符號,匯編語言程序由助記符組成,因此應將它們翻譯成機器代碼。負責這種轉換的程序稱為匯編程序。匯編語言





 工商網監
工商網監
評論