") 基于CW32的MPU6050姿態(tài)傳感器的應(yīng)用
基于CW32的MPU6050姿態(tài)傳感器的應(yīng)用
一、簡介
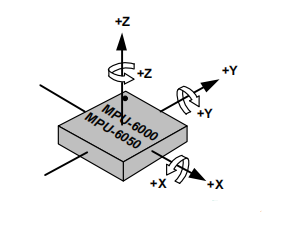
1.MPU6050是一種常用的六軸姿態(tài)傳感器模塊,結(jié)合了三軸陀螺儀和三軸加速度計,以及一個可擴展的數(shù)字運動處理器DMP(Digital Motion Processor),可用I2C接口連接一個第三方的數(shù)字傳感器,比如磁力計。MPU6050 對陀螺儀和加速度計分別用了三個16 位的ADC(0~65535),將其測量的模擬量轉(zhuǎn)化為可輸出的數(shù)字量。為了精確跟蹤快速和慢速的運動,傳感器的測量范圍都是用戶可控的,陀螺儀可測范圍為±250,±500,±1000,±2000°/秒(dps),加速度計可測范圍為±2,±4,±8,±16g。并有可編程的低通濾波器。MPU6050模塊的應(yīng)用場景非常廣泛,包括但不限于以下幾個領(lǐng)域:
(1)姿態(tài)感知與控制:通過讀取陀螺儀和加速度計的數(shù)據(jù),可以實時獲取物體的姿態(tài)信息,如傾斜角度、旋轉(zhuǎn)角度等。這在飛行器、機器人、無人車等項目中非常常見,用于實現(xiàn)姿態(tài)感知和控制。
(2)運動跟蹤與手勢識別:MPU6050可以用于捕捉人體運動軌跡,如手部的姿態(tài)和手勢,從而實現(xiàn)運動跟蹤、手勢識別、虛擬現(xiàn)實交互等應(yīng)用。
(3)震動檢測與防抖:結(jié)合加速度計,MPU6050可以檢測到物體的震動和沖擊,用于防抖技術(shù)、硬盤保護、運動檢測等。
(4)步態(tài)分析與健康監(jiān)測:MPU6050可以用于分析人體的步態(tài)特征和動作,用于健康監(jiān)測、運動分析、姿勢校正等。
二、所需物料+寄存器說明
.本實驗使用到了CW32F030C8小藍(lán)板、GY-521模塊、0.96寸OLED顯示屏Keil5開發(fā)環(huán)境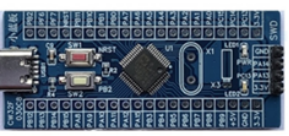
CW32F030C8小藍(lán)板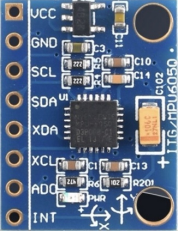
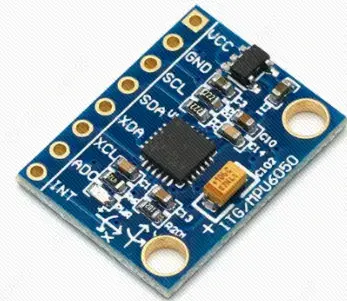
GY-521模塊
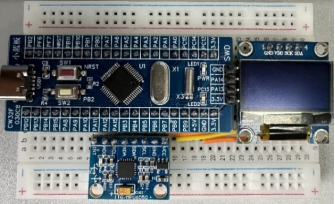
實物展示
【GY-521模塊與單片機連線】:VCC<-->+3.3V
GND<-->GND
SCL<-->PB5
SDA<-->PB4
【OLED顯示屏與單片機連線】:VCC<-->+3.3V
GND<-->GND
SCL<-->PA1
SDA<-->PA2
注:SCL和 SDA是連接MCU的 IIC接口,MCU通過這個IIC 接口來控制MPU6050,另外還有一個 IIC 接口: XCL和XDA ,這個接口可用來連外部從設(shè)備比如磁力計,這樣就可以組成一個九軸傳感器。AD0是MPU6050的地址控制引腳,該引腳控制的是IIC 地址的最低位。MPU6050的默認(rèn)IIC地址是:0X68,如果AD0接VDD,則是0X69。需要注意的是:這里的地址0x68(110 1000)和0x69(110 1001)是不包含最低位的7位數(shù)據(jù),通常最低位用于表示IIC主機的讀取數(shù)據(jù)/寫數(shù)據(jù)模式。如默認(rèn)情況下對MPU6050進行寫操作,則發(fā)送地址0xD0(1101 0000),讀操作則發(fā)送地址0xD1(1101 0001)。
寄存器說明:

該寄存器是配置陀螺儀輸出速率的分頻器,用于為MPU-6050生成采樣速率。這里有個公式:采樣頻率=陀螺儀輸出頻率/(1+采樣分頻數(shù))。當(dāng) DLPF(數(shù)字低通濾波器,見寄存器Configuration)禁用時,陀螺儀輸出頻率為8kHz;當(dāng) DLPF 使能,陀螺儀輸出頻率=1KHz。

該寄存器為陀螺儀和加速度計配置外部幀同步(FSYNC) 管腳的采樣和數(shù)字低通濾波(DLPF)設(shè)置。其中,數(shù)字低通濾波器DLPF由DLPF_CFG配置。根據(jù)下表所示的DLPF_CFG值對加速度計和陀螺儀進行濾波。
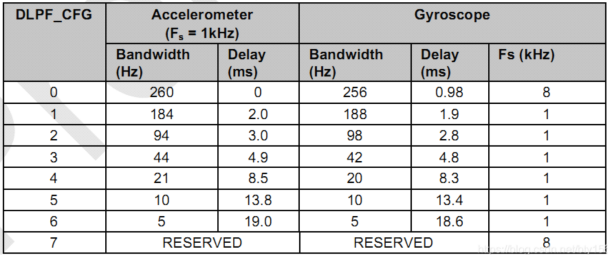
FS為陀螺儀輸出頻率。SMPLRT_DIV由預(yù)設(shè)定的采樣頻率根據(jù)上述的公式計算得出。一般情況下,DPLF濾波頻率為采樣頻率的一半,如設(shè)定采樣頻率為50Hz,由表可知當(dāng)FS為1kHz,SMPLRT_DIV的值為1000/50-1=19。
該寄存器是用來觸發(fā)陀螺儀自檢和配置陀螺儀的滿量程范圍。其中,XG_ST、YG_ST、ZG_ST分別用來設(shè)置陀螺儀X軸、Y軸、Z軸自檢,置0則不觸發(fā)自檢。FS_SEL[1:0]用于設(shè)置陀螺儀的滿量程,如下表:
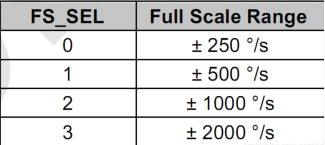
我們一般設(shè)置為3,即滿量程為±2000°/s

該寄存器是用來觸發(fā)加速度計自檢和配置加速度計的滿量程范圍。同時這個寄存器也可以用于配置數(shù)字高通濾波器(DHPF)。其中,XA_ST、YA_ST、ZA_ST分別用來設(shè)置加速度計X軸、Y軸、Z軸自檢,置0則不觸發(fā)自檢。AFS_SEL[1:0]用于選擇加速度計的滿量程范圍,如下表:
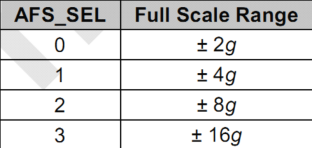
我們一般設(shè)置為0,即滿量程為±2g
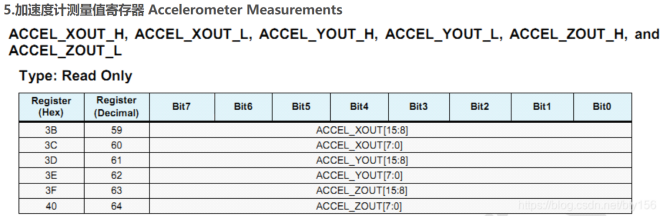
ACCEL_XOUT : 由 2部分組成的 16位數(shù)值存儲最近X 軸加速度計的測量值。 ACCEL_YOUT : 由 2部分組成的 16位數(shù)值存儲最近Y 軸加速度計的測量值。 ACCEL_ZOUT : 由 2部分組成的 16位數(shù)值存儲最近Z 軸加速度計的測量值。
以ACCEL_XOUT為例,若倍率設(shè)定為2g,則意味著ACC_X取最小值-32768時,當(dāng)前加速度為沿X軸正方向2倍的重力加速度;若設(shè)定為4g,取-32768時表示沿X軸正方向4倍的重力加速度,以此類推。顯然,倍率越低精度越好,倍率越高表示的范圍越大,這要根據(jù)具體的應(yīng)用來設(shè)定。以ACC_X為例,若當(dāng)前設(shè)定的加速度倍率為4g,那么將ACC_X讀數(shù)換算為加速度的公式為:

g可取當(dāng)?shù)刂亓铀俣取?/p>
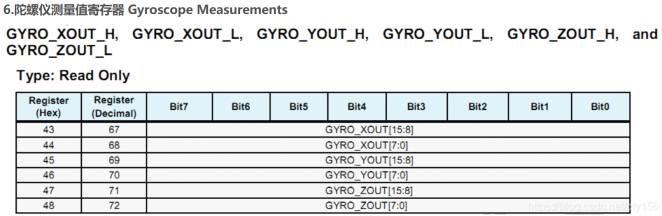
該寄存器存儲最近加陀螺儀的測量值,構(gòu)成與加速度計測量值寄存器相同,不做贅述。
以GYR_X為例,若倍率設(shè)定為250度/秒,則意味著GYR取正最大值32768時,當(dāng)前角速度為順時針250度/秒;若設(shè)定為500度/秒,取32768時表示當(dāng)前角速度為順時針500度/秒。顯然,倍率越低精度越好,倍率越高表示的范圍越大。以GYR_X為例,若當(dāng)前設(shè)定的角速度倍率為1000度/秒,那么將GRY_X讀數(shù)換算為角速度(順時針)的公式為:


該寄存器允許用戶配置電源模式和時鐘源,還提供了復(fù)位整個設(shè)備和禁用溫度傳感器的位。當(dāng)置SLEEP位為1時,MPU-60X0 可以進入低功耗睡眠模式。該寄存器的最低三位用于設(shè)置系統(tǒng)的時鐘源選擇,默認(rèn)值是0(內(nèi)部8M RC振蕩),不過一般設(shè)置為1,即選擇x軸陀螺儀PLL作為時鐘源,以獲得更高精度的時鐘。DEVICE_RESET該位置 1,重啟內(nèi)部寄存器到默認(rèn)值。復(fù)位完成后該位自動清0。TEMP_DIS該位置 1,禁用溫度傳感器。
三、核心代碼
main.c:
#include "main.h"
#include "OLED.h"
#include "GY_521.h"
#include "MYI2C.h"
#include "Delay.h"
typedef struct{
int16_t AX;
int16_t AY;
int16_t AZ;
}MPU6050_Adata; //MPU6050加速度計三軸數(shù)據(jù)
typedef struct{
int16_t GX;
int16_t GY;
int16_t GZ;
}MPU6050_Gdata; //MPU6050陀螺儀三軸數(shù)據(jù)
MPU6050_Adata Adata; //結(jié)構(gòu)體變量
MPU6050_Gdata Gdata;
void GY_521_Init(void) //GY-521初始化
{
GY521_GPIO_Init(); //GPIO初始化
//解除睡眠,失能溫度傳感器,選擇X軸的陀螺儀時鐘
WriteData(GY521_ADDR, MPU6050_PWR_MGMT_1, 0x09);
WriteData(GY521_ADDR, MPU6050_CONFIG, 0x06); //低通濾波
WriteData(GY521_ADDR, MPU6050_SMPRT_DIV, 0x09); //1KHz十分頻為100Hz
WriteData(GY521_ADDR, MPU6050_GYRO_CONFIG, 0x18);//陀螺儀最大量程
WriteData(GY521_ADDR, MPU6050_ACCEL_CONFIG, 0x18);//加速度計最大量程
}
void MPU6050_GetData() //獲取MPU6050六軸數(shù)據(jù)
{
uint8_t MPU6050_Raw_Data[14]={0};
//以MPU6050_ACCEL_XOUT_H為起始地址,連續(xù)讀取14字節(jié)的數(shù)據(jù)
ReadData(GY521_ADDR,MPU6050_ACCEL_XOUT_H,MPU6050_Raw_Data,14);
//數(shù)據(jù)處理
Adata.AX=(MPU6050_Raw_Data[0]< 8)|MPU6050_Raw_Data[1];
Adata.AY=(MPU6050_Raw_Data[2]< 8)|MPU6050_Raw_Data[3];
Adata.AZ=(MPU6050_Raw_Data[4]< 8)|MPU6050_Raw_Data[5];
Gdata.GX=(MPU6050_Raw_Data[8]< 8)|MPU6050_Raw_Data[9];
Gdata.GY=(MPU6050_Raw_Data[10]< 8)|MPU6050_Raw_Data[11];
Gdata.GZ=(MPU6050_Raw_Data[12]< 8)|MPU6050_Raw_Data[13];
}
int main()
{
OLED_Init(); //OLED初始化
GY_521_Init(); //GY-521初始化
OLED_ShowString(1,1,"A: G:");//提示:左列顯示加速度計數(shù)據(jù);右列顯示陀螺儀數(shù)據(jù)
while(1)
{
MPU6050_GetData(); //獲取六軸數(shù)據(jù)
OLED_ShowSignedNum(2,1,Adata.AX,5);
OLED_ShowSignedNum(3,1,Adata.AY,5);
OLED_ShowSignedNum(4,1,Adata.AZ,5);
OLED_ShowSignedNum(2,9,Gdata.GX,5);
OLED_ShowSignedNum(3,9,Gdata.GY,5);
OLED_ShowSignedNum(4,9,Gdata.GZ,5);
Delay_ms(100); //延時刷新
}
}
四、效果演示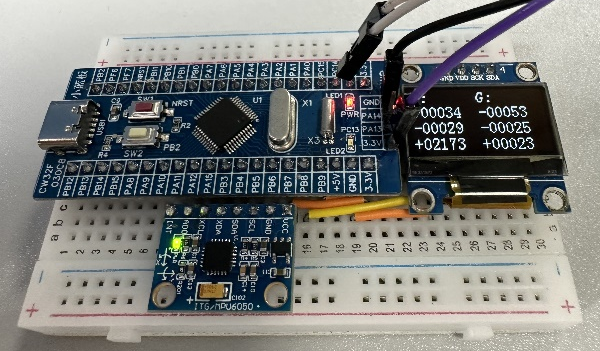
平放
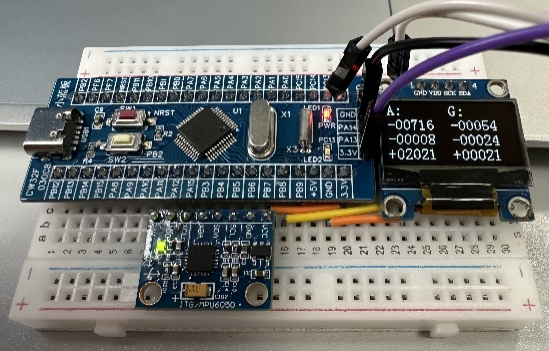
向下傾斜
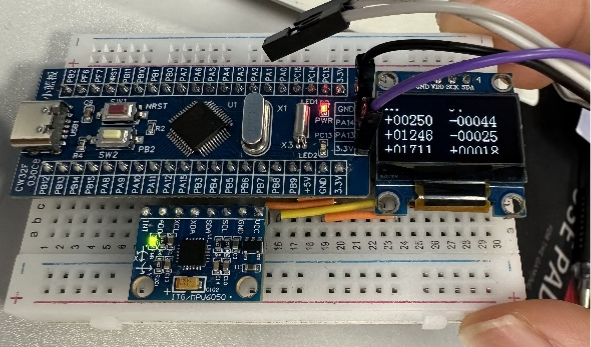
左傾斜向
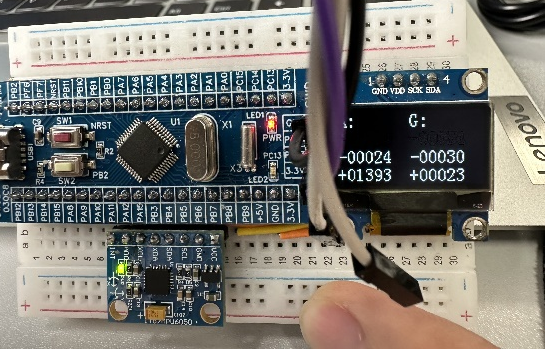
直立
讀到的原始數(shù)據(jù)還不能直接使用,要轉(zhuǎn)化成四元數(shù),歐拉角后,獲得器件的姿態(tài)角才有用,而 MPU6050 自帶了數(shù)字運動處理器,即 DMP,并且,InvenSense 提供了一個 MPU6050 的嵌入式運動驅(qū)動庫,結(jié)合 MPU6050 的 DMP,可以將我們的原始數(shù)據(jù),直接轉(zhuǎn)換成四元數(shù)輸出,而得到四元數(shù)之后,就可以很方便的計算出歐拉角,從而得到y(tǒng)aw、roll和pitch。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753072 -
CW32
+關(guān)注
關(guān)注
1文章
203瀏覽量
626
發(fā)布評論請先 登錄
相關(guān)推薦
MPU6050讀取數(shù)據(jù)有問題
CW32模塊使用 MPU6050六軸傳感器
【項目展示】基于CW32的遙控循跡小車

求助求助,MPU6050模塊用DMP時的自檢問題
mpu6050芯片的INT中斷信號引腳和單片機之間需要接電阻嗎?
MPU6050 dmp庫定時查詢讀取偶爾獲取失敗的原因?
CW32量產(chǎn)燒錄工具


MPU6050勻速轉(zhuǎn)動一段時間后,偏航角不變怎么解決?
什么是姿態(tài)傳感器MPU6050
ADXL345和MPU6050的區(qū)別
基于CW32的門禁綜合系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論