 柔性觸覺傳感陣列+深度學習實現健康監測和紋理識別
柔性觸覺傳感陣列+深度學習實現健康監測和紋理識別
人類依靠皮膚真皮層中的感受器和與其相連的神經元網絡來實現觸覺感知。這些感受器能夠檢測來自外部的各種物理刺激(如觸摸、壓力、溫度變化等),并通過神經元網絡將這些信號傳輸到大腦進行解讀和響應。機器人觸覺感知旨在將這些技能復制到各種應用中,如機器人抓取、醫療康復以及非結構化環境下的操作等。觸覺傳感器被用來賦予軟體機器人感知能力,使機器人更精確地識別和感知物體的表面紋理、硬度和形態,在抓取和操作不規則或易碎物體時顯示出卓越的靈巧性。然而,目前為止這些觸覺傳感器還沒有實現大規模應用,主要原因包括(1)大多數報道的觸覺傳感器不能分析和處理外力,并給出多模態信號的實時響應。例如具有感官能力的機器人有望在極端環境如水下或通信中斷場景中監控和實時處理情況;(2)缺乏簡單、大規模的觸覺傳感器制造方法。機器人觸覺感知需要觸覺傳感器具有一致性、優異的靈敏度、高空間分辨率、寬檢測范圍以及易于集成到微型系統中等特性。因此,開發一種制造高性能觸覺傳感器的有效途徑至關重要。
中科院空間應用中心王功研究員和趙偉副研究員提出一種結合模板化激光誘導石墨烯(TLIG)、彈性體熱轉印和3D打印銀電極的簡單策略來制造傳感性能可調的TLIG基觸覺傳感器,并集成陣列化數據采集系統實現機器人觸覺感知。該傳感器具有出色的傳感靈敏度(52260.2 kPa-1,范圍0-7 kPa)、寬檢測范圍(高達1000 kPa)、快速響應(響應恢復時間12/46 ms)、出色的循環穩定性(10000個循環)以及零待機功耗。該傳感器還具有出色的可設計性、防水性能,可共形貼附于人體皮膚表面實現健康監測。為了展示集成和規模化制造的能力,研究人員將5×2觸覺傳感陣列集成到機器人抓手系統中,利用深度神經網絡識別不同物體的物理特征,實現觸覺感知。基于卷積神經網絡(CNN)的紋理識別系統具有94.51%的較高識別準確率。與傳統制造方法相比,混合制造策略為生產高效率、低成本的觸覺傳感器提供了一種很有前景的方法。
該研究以題為“Templated Laser-Induced-Graphene-Based Tactile Sensors Enable Wearable Health Monitoring and Texture Recognition via Deep Neural Network”的論文發表在最新一期《ACS Nano》上。中科院空間應用中心博士生季嘉雯為第一作者,王功研究員和趙偉副研究員為共同通訊作者。
TLIG觸覺傳感器的制備流程
采用激光誘導石墨烯和POE熱轉印技術制備了TLIG薄膜。將聚丙烯酸溶液固化在從砂紙上獲得的模板化PDMS模具上,從而制得模板化的PI并作為激光碳源。采用不同目數和尺寸的砂紙,可以實現各種多層級結構的PI模板。利用激光在模板化的PI膜上生成多孔石墨烯,并通過熱壓將模板化的LIG層轉印到POE膜上,即可得到具有多層級微結構的TLIG膜。底電極層為3D打印在PI膜上的銀叉指電極,將其與TLIG薄膜組裝得到TLIG觸覺傳感器。
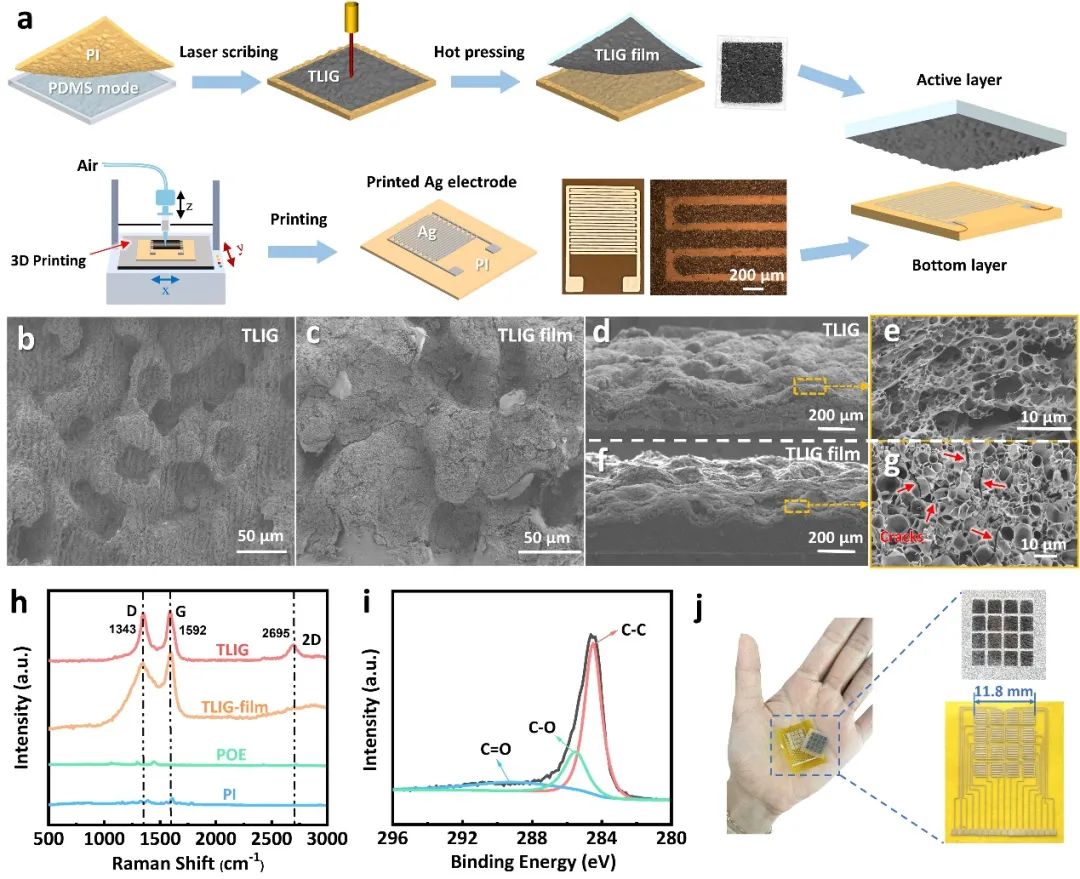
圖1:基于TLIG觸覺傳感器的制備流程與性能表征
TLIG觸覺傳感器的傳感機理模型
不同目數的砂紙模板具有不同高度和分布的微結構,這將顯著影響外力作用下的變形程度和接觸面積。這種改變會影響導電通路的建立,從而直接影響傳感性能。利用砂紙模板賦予傳感層的多層級微結構,可以將傳感過程分為三個階段:(1)在微小壓力下,只有少數高凸起的TLIG薄膜與Ag叉指電極接觸,開始建立導電通路;(2)隨著壓力的增加,TLIG薄膜進一步壓縮變形,導致高凸起和Ag電極之間的接觸面積持續增大,同時較小的凸起開始接觸底電極。隨著TLIG薄膜與Ag電極之間的間隙不斷減小,TLIG薄膜的變形更加劇烈,觸覺傳感器的電阻顯著降低;(3)在高壓范圍下,大部分凸起與Ag電極相互作用并達到峰值接觸面積。此時TLIG膜與Ag電極層幾乎完全接觸,電阻值降至最小并保持穩定。
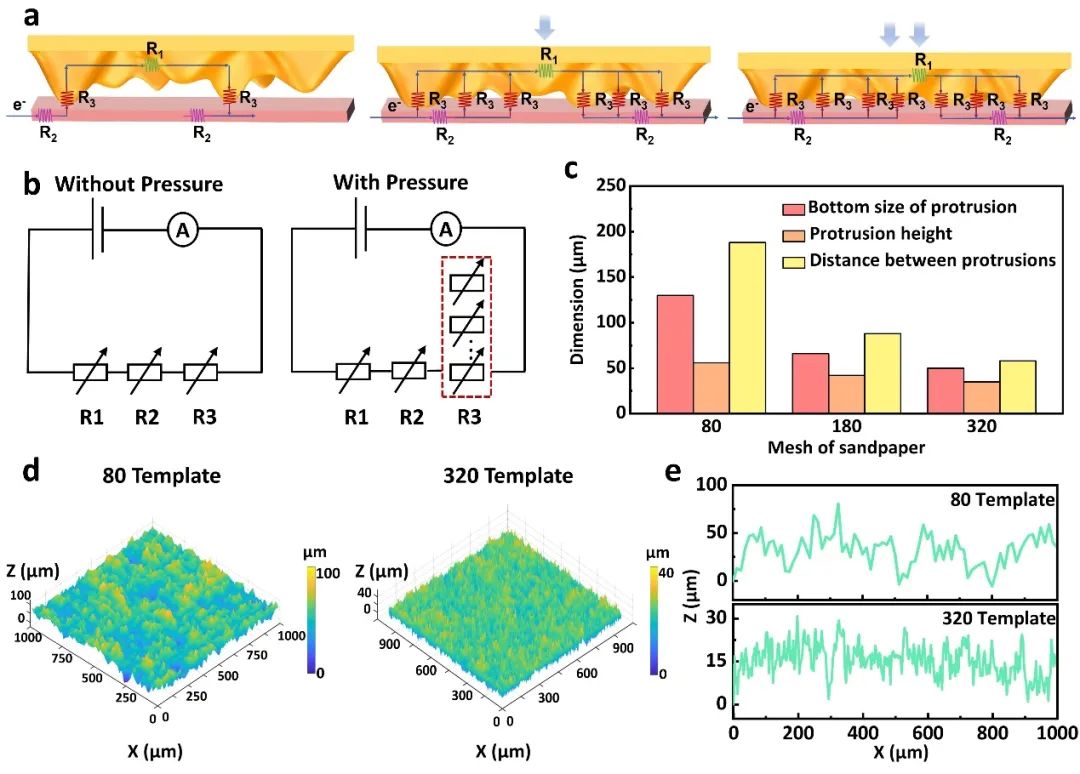
圖2:基于TLIG觸覺傳感器的傳感機理分析
TLIG觸覺傳感器的傳感性能分析
為了測量曲面上的動態力,獲得傳感器在彎曲表面上的高靈敏度和寬響應范圍,研究人員在傳感層和電極層之間引入自支撐的間隔層,實現傳感器的零待機功耗。通過使用不同目數的砂紙模板,制備出性能優異且可調的觸覺傳感器。對于高目數模板,傳感層微結構分布密度高、凸起窄而低,其在0~7 kPa范圍內可實現超高的靈敏度52260.2 kPa-1。而低目數模板,傳感層微結構分布密度低、凸起高而寬,可實現超過1000 kpa的較寬的檢測范圍和優異的線性度。同時傳感器還具有65pa的較低檢測限、快速的響應/恢復時間12/46 ms和10000次加載/卸載循環下的優異工作穩定性。使用不同目數的砂紙模板,我們可以制備靈敏度可調的傳感器。這種能力為傳感器提供了更大的通用性和選擇性,以滿足廣泛的應用需求。
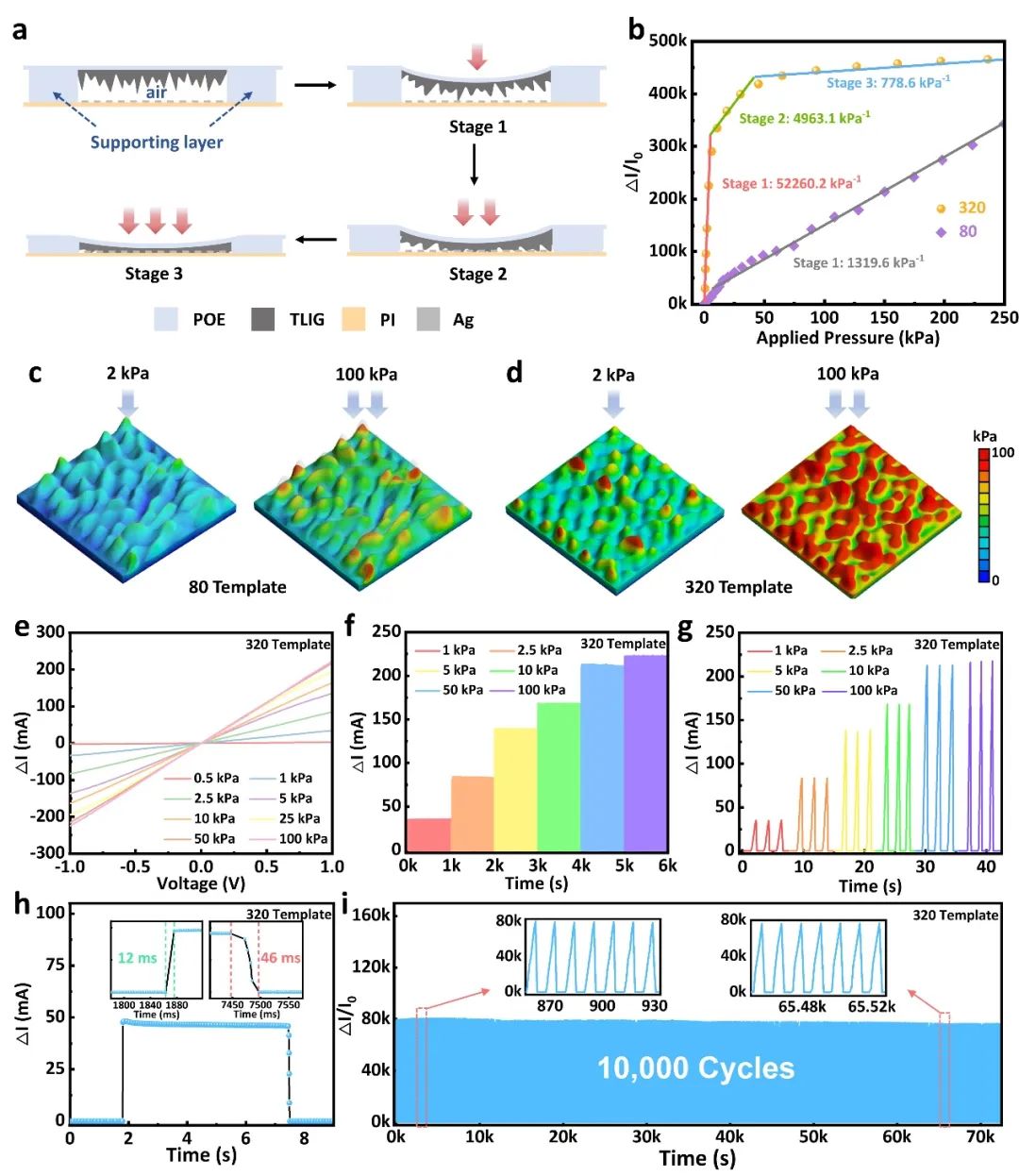
圖3:基于TLIG觸覺傳感器的電學性能研究
基于TLIG觸覺傳感器的高分辨率可穿戴醫療健康檢測系統
憑借在寬壓力范圍內的高靈敏度和優異的穩定性,基于TLIG的觸覺傳感器非常適合集成到可穿戴醫療健康檢測系統中。傳感器具有的出色拉伸性和彎曲特性,也可以靈活地附著在身體的各個部位,以檢測特定的和可重復的脈沖信號。實驗證明,該傳感器可以檢測范圍廣泛的壓力信號,從超低壓(氣流和振動)到低壓(脈搏和各種人體運動),再到高壓(人體步態監測),這為電子皮膚、機器人和人工智能的應用提供了巨大的潛力。
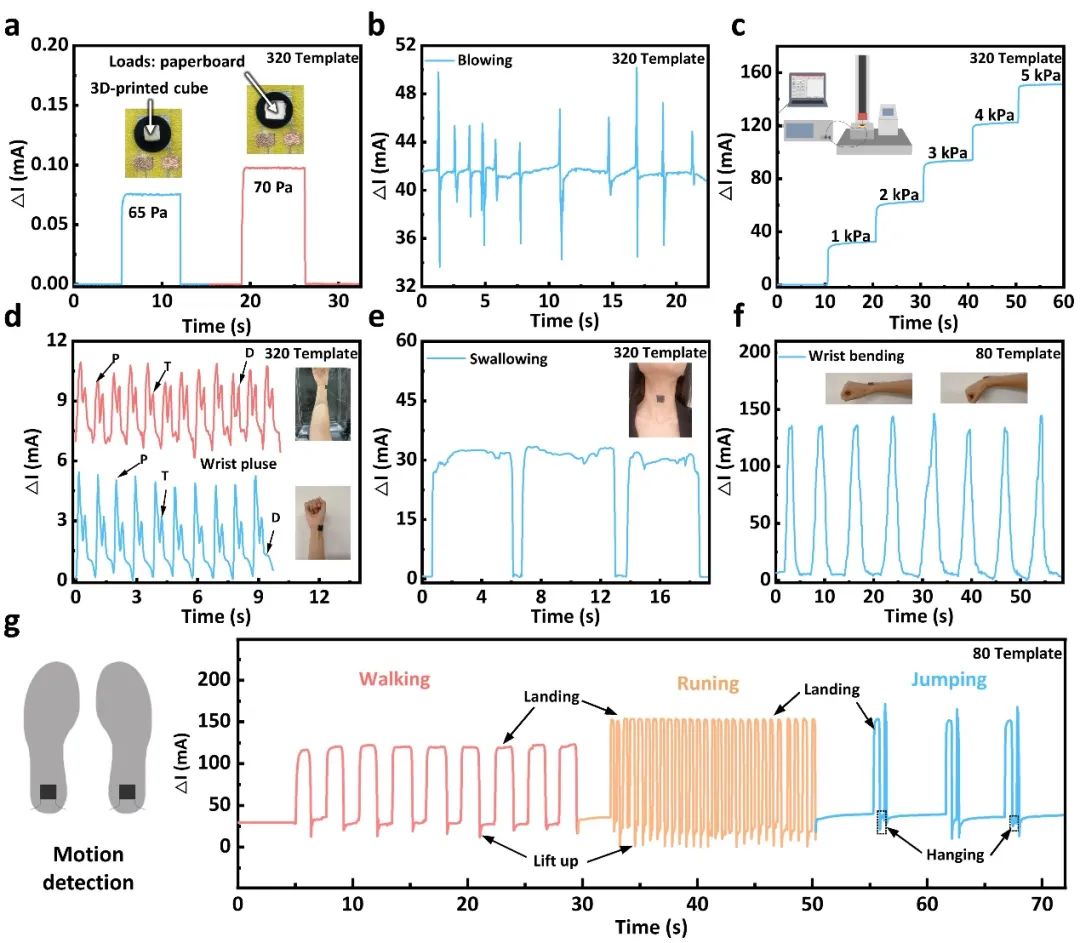
圖4:基于TLIG觸覺傳感器的應用
TLIG觸覺傳感陣列集成觸覺感知數據采集系統
機器人觸覺感知的實現需要機器人集成柔性傳感器,以提供離散和實時反饋。本研究選擇一個四指柔性機械手作為觸覺感知平臺,并設計了一個基于5×2 TLIG的觸覺傳感陣列來匹配其形狀。將其與多通道信號采集和預處理模塊、通信模塊和上位機共同組成觸覺感知數據采集系統。該系統不僅可以實現對物體物理性質(包括形狀、硬度和粗糙度等)的感知從而實現不同物體的識別,還可以提供交互式接觸點動態壓力分布的詳細信息,從而增強柔性抓手的觸覺感知能力。同時,利用彈性體的自封裝,可以實現柔性機械手的水下抓取和識別,使其適合醫療環境和海洋領域等方面的應用。
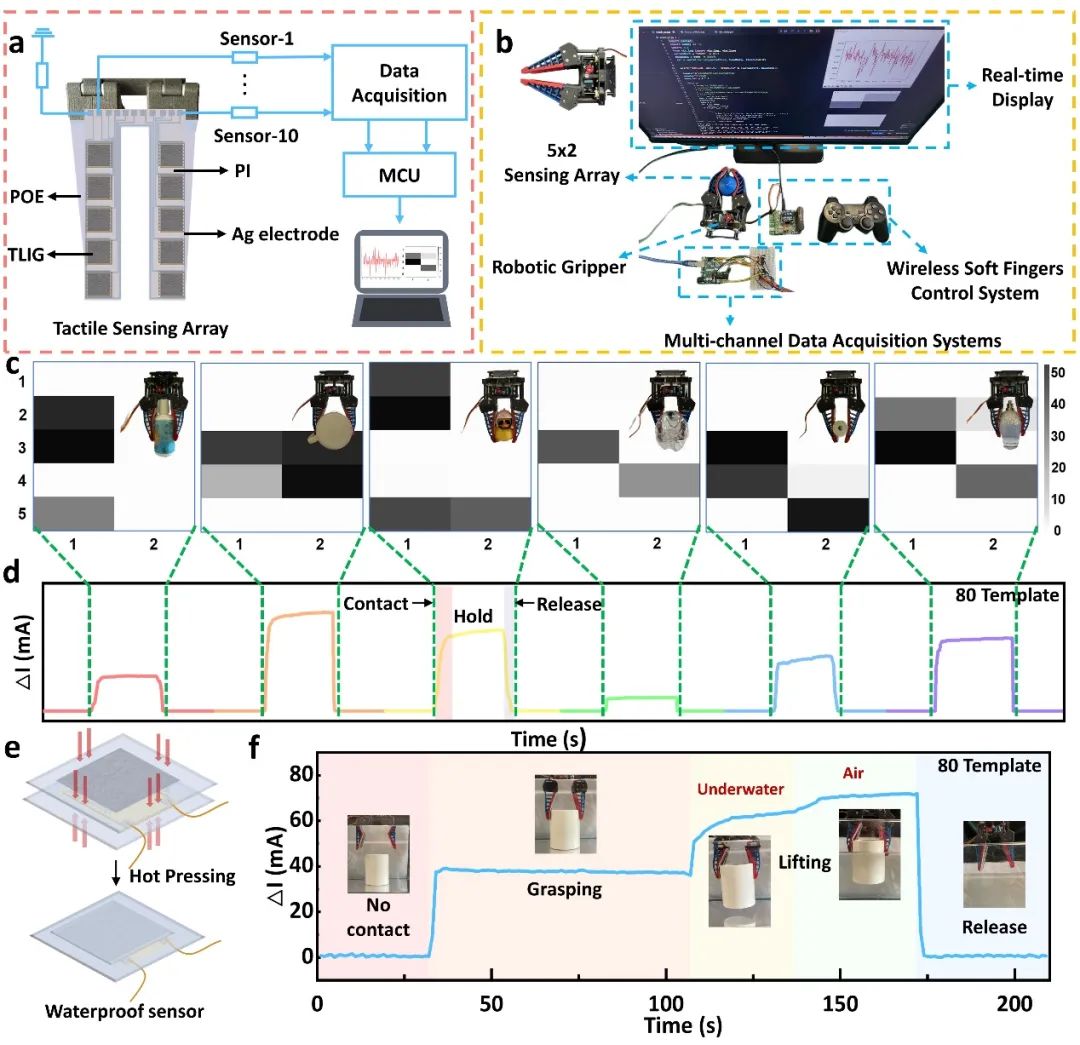
圖5:基于TLIG的無線柔性機械手觸覺傳感陣列系統的結構與應用
TLIG觸覺傳感器用于基于深度神經網絡的紋理觸覺感知
人類可以通過手部神經元分析復雜的振動信號來區分物體,這對機器人來說是一個挑戰。本研究采用基于卷積神經網的機器學習算法對柔性機械手采集的數據進行處理和分析,實現紋理觸覺感知。測試系統由柔性機械手、基于TLIG的觸覺傳感陣列、編碼器、解碼器和神經網絡組成,該系統用于感知觸覺交互過程中的信號特征。本研究共采集了9種物體的紋理信號,共采用了8種機器學習方法包括CNN、Transformer、LSTM、GRU、MLP、K-means、SVM和PCA進行識別,其中CNN具有最高的準確率,達到94.51%。
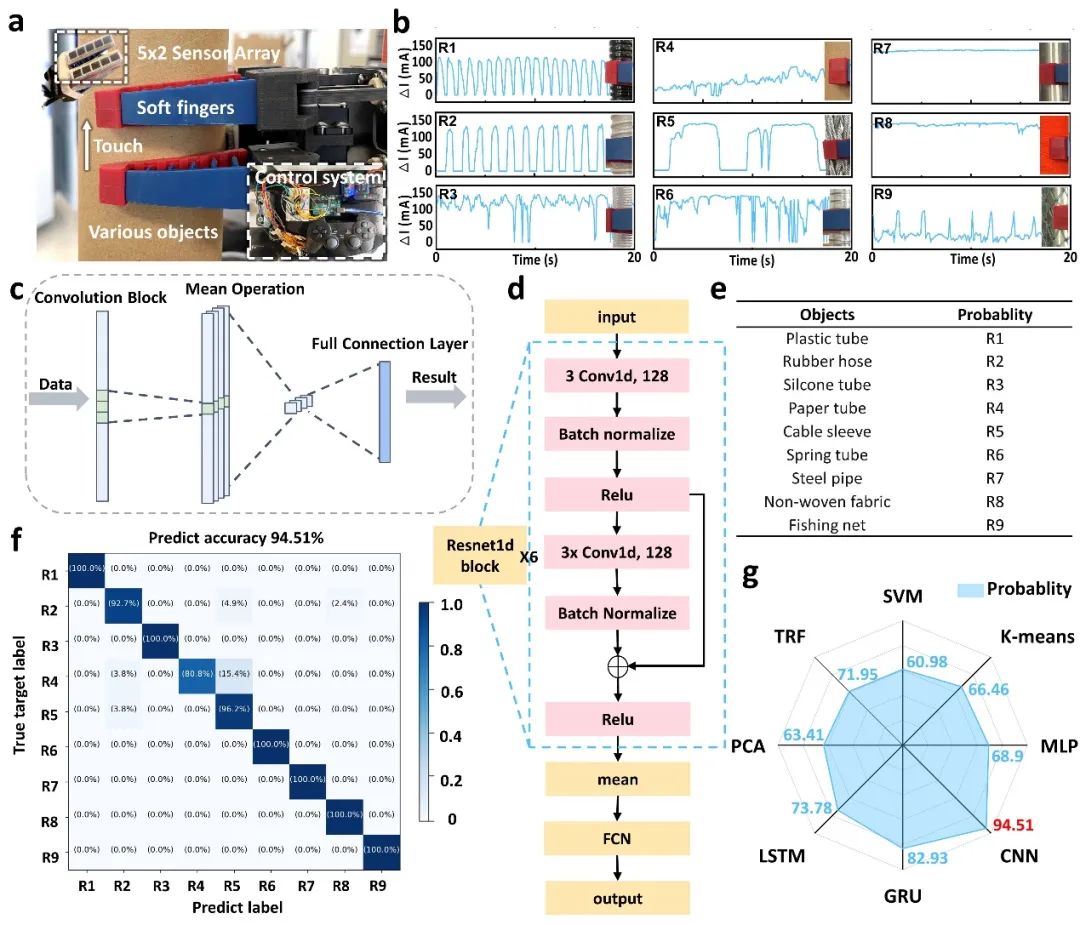
圖6:卷積神經網絡用于紋理識別
審核編輯:劉清
-
機器人
+關注
關注
211文章
28468瀏覽量
207358 -
人工智能
+關注
關注
1792文章
47354瀏覽量
238815 -
觸覺傳感器
+關注
關注
4文章
85瀏覽量
9361 -
卷積神經網絡
+關注
關注
4文章
367瀏覽量
11877
原文標題:柔性觸覺傳感陣列+深度學習,實現健康監測和紋理識別
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
西安交通大學:受章魚觸角接觸行為啟發的仿生觸覺傳感陣列
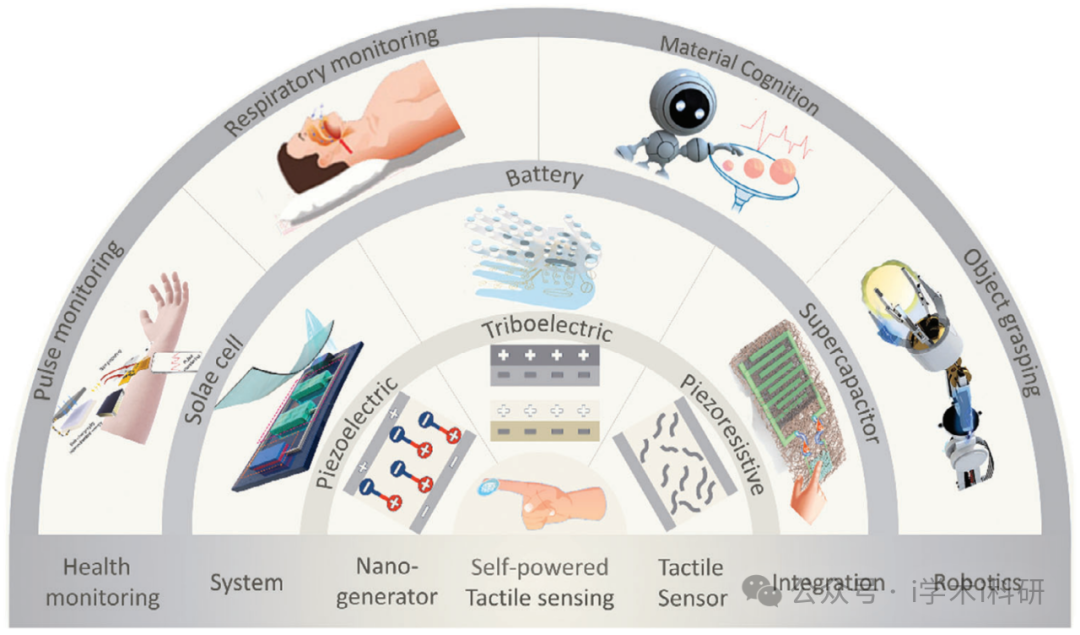
廣東工業大學:用于健康監測和機器人技術的柔性自供電觸覺傳感最新進展
深度識別算法包括哪些內容

利用Matlab函數實現深度學習算法
基于Python的深度學習人臉識別方法
深度學習中的時間序列分類方法
深度學習中的無監督學習方法綜述
基于深度學習的鳥類聲音識別系統
觸覺傳感器新進展:從傳感器制造到高級應用
采用梯度剛度滑動設計的柔性應變傳感器

用于機器人物體識別和滑動檢測的磁敏觸覺傳感器






 工商網監
工商網監
評論