") 消除前饋通道的Miller補(bǔ)償:電流跟隨器結(jié)構(gòu)
消除前饋通道的Miller補(bǔ)償:電流跟隨器結(jié)構(gòu)
常規(guī)Miller補(bǔ)償結(jié)構(gòu),將Cc跨接在M2的G、D之間,會(huì)引入一條前饋通路,從而引入一個(gè)RHP(右半平面)的零點(diǎn)。
RHP零點(diǎn)對穩(wěn)定性傷害極大,體現(xiàn)在2個(gè)方面:(1)增益:+20dB/10倍頻(和極點(diǎn)的影響相反);(2)相位:和左半平面極點(diǎn)一樣,會(huì)提供相位延遲。
如何消除(減弱)RHP零點(diǎn)的影響呢?大致有以下幾種方法:
(1)引入調(diào)零電阻Rz=1/gm2,可以將RHP零點(diǎn)推到無窮遠(yuǎn)
(2)進(jìn)一步增大調(diào)零電阻Rz,使其>1/gm2,從而將RHP零點(diǎn)變成LHP零點(diǎn),LHP零點(diǎn)對穩(wěn)定性有補(bǔ)償作用,甚至可以用于抵消次極點(diǎn)P2
(3)引入額外的電路打斷前饋通路,有電壓跟隨和電流跟隨兩種方式。
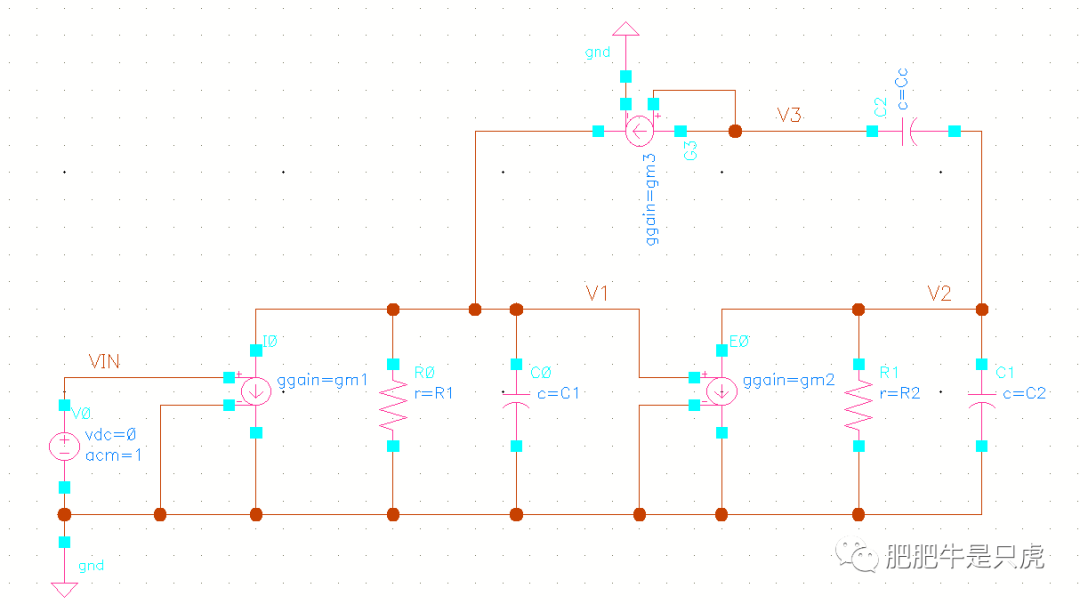
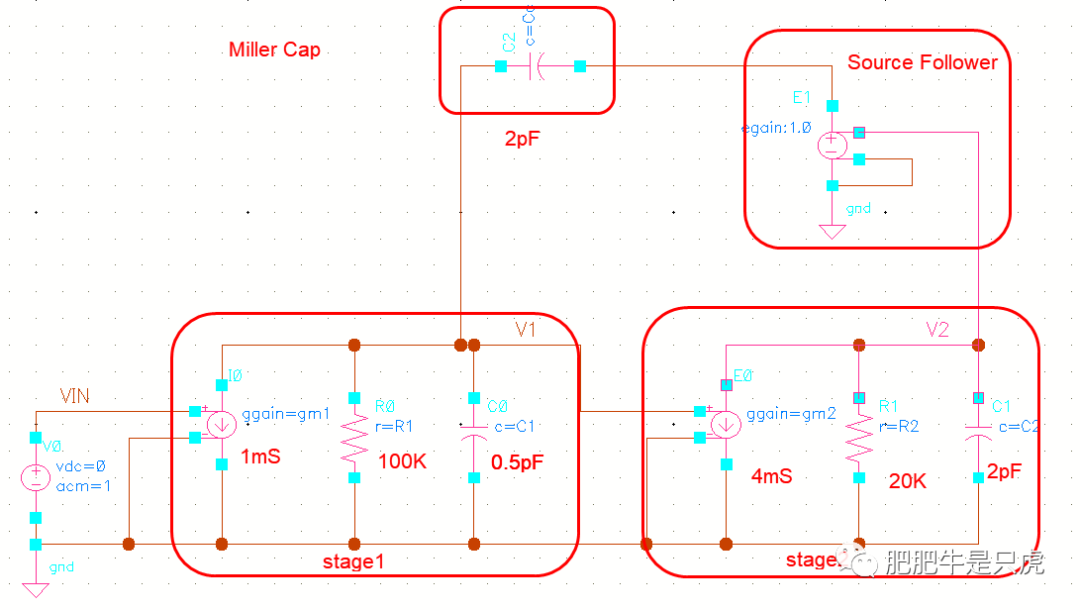
本文研究的就是上述3種方法中的第3條,采用“電流跟隨”的方式打斷Cc的前饋通路。
小信號(hào)圖如下:
**用matlab的符號(hào)運(yùn)算推導(dǎo)傳函,**程序如下:
%%
clear;clc;
syms Vin gm1 gm2 gm3 R1 R2 R3 C1 C2 C3 Cc V1 V2 V3 positive;
syms s ;
%
eq1 = sym('gm1Vin + V1/R1 + V1sC1 - gm3V3 = 0');
eq2 = sym('gm2V1 + V2/R2 + V2s*C2 + (V2-V3)sCc = 0');
eq3 = sym('gm3*V3 + (V3-V2)sCc = 0');
[V1,V2,V3] = solve(eq1, eq2, eq3,'V1','V2','V3');
%
[num, den] = numden(V2);
num = collect(num,Vin)
den = collect(den,Vin)
%%
Matlab計(jì)算結(jié)果如下:
num=gm1R1gm2 R2 (1+s*Cc/gm3)
den=as^3+bs^2+c*s+1
其中a=R1R2C1C2Cc/gm3
b=R1*C1*Cc/gm3 + R2*C2*Cc/gm3 + R1*R2*C1*(C2+Cc)
c=Cc/gm3 + R1*C1 + R2*(C2+Cc) + gm2*R1*R2*Cc
進(jìn)行簡化,
den=as^3+bs^2+c*s+1
其中 a=R1R2C1C2Cc/gm3
b≈R1*R2*C1*(C2+Cc)
c≈gm2*R1*R2*Cc
** 極點(diǎn)的推導(dǎo):**
假設(shè)3個(gè)極點(diǎn)分別為p1、p2、p3,其中p1為主極點(diǎn),p2為次極點(diǎn),p3為次次極點(diǎn),則
Den = (1-s/p1)(1-s/p2)(1-s/p3)= as^3 + bs^2 +c*s +1
a=-1/(p1p2p3)
b=1/(p1p2)+1/(p1p3)+1/(p2p3)≈1/(p1p2)
c=-(1/p1+1/p2+1/p3)≈-1/p1
聯(lián)立上面幾個(gè)式子,假設(shè)p1<
p1 = -1/(gm2R1R2*Cc)--------和常規(guī)miller補(bǔ)償?shù)慕Y(jié)論一樣
p2 = - gm2/C1*Cc/(C2+Cc)
p3 = -gm3/C2Cc*(C2+Cc)
驗(yàn)算:如果C1=0.5pF,C2=Cc=2pF,gm2=gm3=4mS,代入上面的結(jié)果,得到p3/p2=gm3/gm2=1。顯然沒滿足p2<
如果不能做到gm3>>gm2,那p2<
** 零點(diǎn)的推導(dǎo):**
LHP零點(diǎn):-gm3/Cc
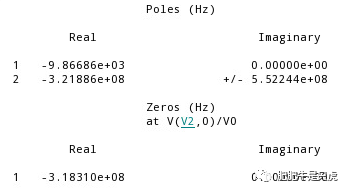
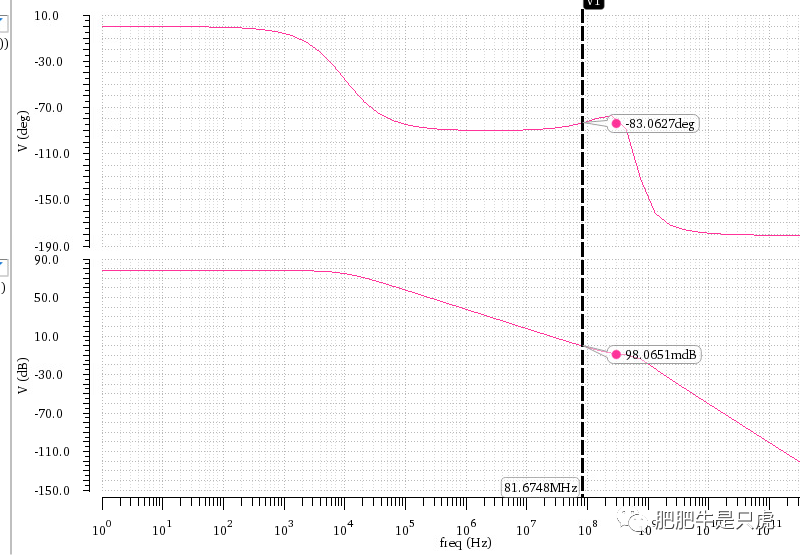
仿真驗(yàn)證:
- gm3=gm2=4mS
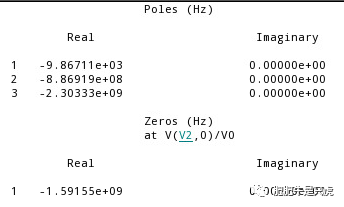
- gm2=4mS,gm3=20mS
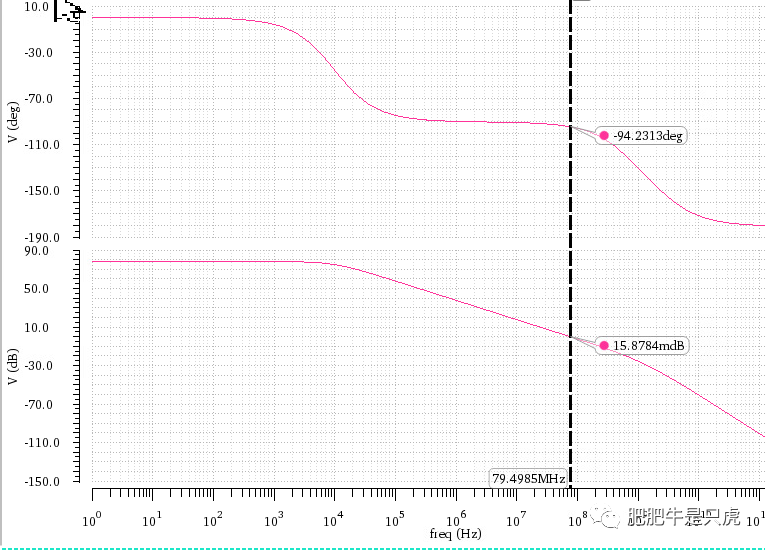
結(jié)論:
- 采用電流跟隨器結(jié)構(gòu)消除前饋通道的Miller補(bǔ)償方案,主極點(diǎn)和常規(guī)Miller補(bǔ)償一樣。除此以外,還存在2個(gè)極點(diǎn)一個(gè)零點(diǎn),均為左半平面。
- 吳金老師在他的“CMOS模擬IP線性集成電路”一書中給出了次極點(diǎn)的近似公式:gm2≈gm2/C2*Cc/C1,進(jìn)而給了一個(gè)結(jié)論:“電流跟隨器模式下的高頻p2極點(diǎn)向外增加了Cc/C1倍,由于Cc>>C1,電流模式下的高頻次極點(diǎn)頻域更高,頻率補(bǔ)償?shù)男Ч黠@。”根據(jù)上面的推導(dǎo),這個(gè)結(jié)論需要附加一個(gè)前提條件:gm3>>gm2。對于更加一般的情況,這里的極點(diǎn)分布更加復(fù)雜。
- 在實(shí)際電路設(shè)計(jì)中,如果不滿足gm3>>gm2,則很容易引入一對共軛復(fù)極點(diǎn)。想要滿足gm3>>gm2,常規(guī)結(jié)構(gòu)的Source Follower需要較大的靜態(tài)電流。或許可以考慮采用“Super Source Follower”,以較低的功耗實(shí)現(xiàn)gm的倍增(將gm倍增一個(gè)MOS的本征增益)。后面找時(shí)間驗(yàn)證下。
- 總體上,感覺不管是“電壓跟隨”還是“電流跟隨”,和常規(guī)的“Miller補(bǔ)償+調(diào)零電阻”方案相比,沒有明顯優(yōu)勢。一頓操作猛如虎,效果原地杵。
-
CMOS
+關(guān)注
關(guān)注
58文章
5710瀏覽量
235418 -
matlab
+關(guān)注
關(guān)注
185文章
2974瀏覽量
230385 -
仿真器
+關(guān)注
關(guān)注
14文章
1017瀏覽量
83722 -
電壓跟隨器
+關(guān)注
關(guān)注
10文章
192瀏覽量
32625 -
電流跟隨器
+關(guān)注
關(guān)注
2文章
6瀏覽量
8154
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
運(yùn)算放大器的補(bǔ)償方法:Miller補(bǔ)償
消除前饋通道的Miller補(bǔ)償:電壓跟隨器
帶有前饋補(bǔ)償器的ACOT?控制降壓轉(zhuǎn)換器的輸出直流偏移計(jì)算
位置環(huán)前饋環(huán)路設(shè)計(jì)
永磁同步電機(jī)偏差解耦和電流前饋解耦控制比較
設(shè)定值前饋控制與加速度觀測模型應(yīng)用
滯后系統(tǒng)的前饋——反饋預(yù)估控制
射頻前饋功放設(shè)計(jì)資料
以反饋電流為輸入的電壓前饋補(bǔ)償型電流調(diào)節(jié)器設(shè)計(jì)的概述

永磁同步電機(jī)電流前饋與電壓補(bǔ)償法的研究的詳細(xì)中文資料(免費(fèi)下載)
永磁同步電機(jī)的負(fù)載觀測及前饋補(bǔ)償






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論