

近日,蘑菇車聯(lián)提交的軌跡預(yù)測論文被IEEE Transactions on Intelligent Vehicles(IEEE TIV)正式錄用。這是蘑菇車聯(lián)軌跡預(yù)測算法今年第二次獲得頂級學(xué)術(shù)期刊IEEE認(rèn)可。 IEEE TIV是全世界第一份智能車專業(yè)學(xué)術(shù)期刊,目前已躋身《期刊引用報告》(Journal Citation Reports, JCR)Q1區(qū),2023年,該期刊位列IEEE所有期刊第六位。與此同時,IEEE TIV 在控制與優(yōu)化領(lǐng)域121種期刊中排名第3位;在汽車工程領(lǐng)域115種期刊中排名第6。
【蘑菇車聯(lián)論文入選IEEE】 本次由蘑菇車聯(lián)與復(fù)旦大學(xué)類腦人工智能科學(xué)與技術(shù)研究院共同撰寫的論文提出,軌跡預(yù)測模型Lane Transformer++可以提高軌跡預(yù)測的泛化能力,讓自動駕駛車輛更快適應(yīng)新環(huán)境。
軌跡預(yù)測對自動駕駛車輛以及自行車、行人等交通參與者的安全至關(guān)重要,近年來,許多軌跡預(yù)測模型被提出,但大多數(shù)模型都沒有考慮泛化能力。如果泛化能力不夠,同時疊加速度、道路結(jié)構(gòu)和交通規(guī)則的差異,就會導(dǎo)致模型偏差及預(yù)測性能下降。這就意味著,一輛自動駕駛汽車能在武漢的街道上安全行駛,到了北京可能就會失去“準(zhǔn)頭”。
在自動駕駛大規(guī)模落地的過程中,自動駕駛車輛不可能進(jìn)入一座新城市就更改一次預(yù)測模型,也因此,軌跡預(yù)測模型的領(lǐng)域泛化成為亟需解決的關(guān)鍵問題。
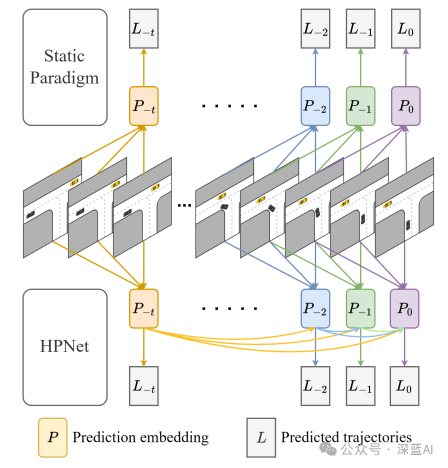
蘑菇車聯(lián)將領(lǐng)域泛化的難點(diǎn)歸因于兩個要素:速度和環(huán)境,“Lane Transformer++”的兩個加號分別代表速度問題和環(huán)境問題。
為了解決速度差異對軌跡預(yù)測模型帶來的影響,蘑菇車聯(lián)基于模型軌跡生成多層感知的速度細(xì)化模塊,用以減輕速度偏差;針對環(huán)境帶來的變量,蘑菇車聯(lián)利用自蒸餾技術(shù)進(jìn)一步提高模型對陌生環(huán)境的適應(yīng)能力。
在Argoverse和INTERACTION數(shù)據(jù)集上的全面評估表明,Lane Transformer++能夠顯著提高預(yù)測性能,特別是在交互數(shù)據(jù)集上,Lane Transformer++性能最為領(lǐng)先。此外,該模型還可以作為大多數(shù)現(xiàn)有軌跡預(yù)測模型的插件,提高軌跡預(yù)測模型的整體泛化能力。
蘑菇車聯(lián)匯聚了自動駕駛領(lǐng)域頂尖的技術(shù)人才,未來將持續(xù)在前沿技術(shù)領(lǐng)域不斷突破,提升技術(shù)核心競爭力,助力自動駕駛技術(shù)規(guī)模化應(yīng)用。
審核編輯:彭菁
-
IEEE
+關(guān)注
關(guān)注
7文章
388瀏覽量
48061 -
人工智能
+關(guān)注
關(guān)注
1804文章
48750瀏覽量
246714 -
模型
+關(guān)注
關(guān)注
1文章
3493瀏覽量
50033 -
蘑菇車聯(lián)
+關(guān)注
關(guān)注
0文章
33瀏覽量
403
原文標(biāo)題:再獲IEEE認(rèn)可,蘑菇車聯(lián)軌跡預(yù)測模型行業(yè)領(lǐng)先
文章出處:【微信號:moguzhixingmogo,微信公眾號:蘑菇車聯(lián)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
蘑菇車聯(lián)與日照市達(dá)成戰(zhàn)略合作
電磁軌跡預(yù)測分析系統(tǒng)軟件全面解析
青島市領(lǐng)導(dǎo)蒞臨蘑菇車聯(lián)調(diào)研
信道預(yù)測模型在數(shù)據(jù)通信中的作用
運(yùn)動控制中如何實(shí)現(xiàn)路徑軌跡預(yù)測
一種創(chuàng)新的動態(tài)軌跡預(yù)測方法
園區(qū)封閉化管理之人員和車輛定位及軌跡追蹤
人員軌跡分析算法有哪些?
人員定位及軌跡管理技術(shù)原理及應(yīng)用領(lǐng)域





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論