") 伺服編碼器有何特點(diǎn)?如何連接呢?
伺服編碼器有何特點(diǎn)?如何連接呢?
EnDat
EnDat(Encoder Data)指變頻器通過(guò)時(shí)鐘信號(hào)來(lái)實(shí)現(xiàn)同步傳輸串口通信,不但可以傳送位置值,也可以傳送參數(shù)值。在編碼器的內(nèi)部有專門(mén)的存儲(chǔ)區(qū)來(lái)存放編碼器參數(shù),制造商可以利用此存儲(chǔ)區(qū)來(lái)存放編碼器的參數(shù)。上位機(jī)可以發(fā)送控制字給編碼器。EnDat編碼器有以下特點(diǎn):
①可以讀取實(shí)際位置;
②電機(jī)通信過(guò)程中實(shí)現(xiàn)零點(diǎn)補(bǔ)償;
③并行輸出增量信號(hào),可以減小對(duì)動(dòng)態(tài)特性要求較高的系統(tǒng)的延遲時(shí)間;
④數(shù)據(jù)傳輸可靠性高;
⑤存儲(chǔ)編碼器參數(shù),控制器可以自動(dòng)讀取編碼器參數(shù),下圖所示為在Starter軟件中的設(shè)定;
⑥支持監(jiān)控與診斷功能;
⑦傳輸時(shí)間短
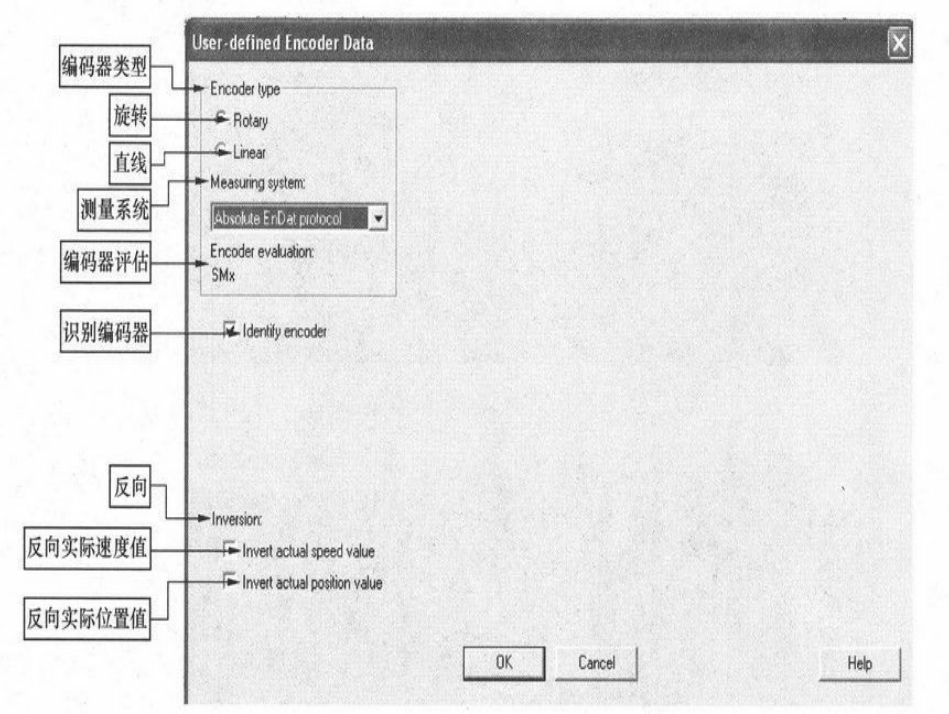
Starter中組態(tài)電機(jī)時(shí)編碼自動(dòng)識(shí)別示例
SSI
當(dāng)多圈編碼器檢測(cè)4096轉(zhuǎn)(12位)而每轉(zhuǎn)又有8092個(gè)數(shù)據(jù)(13位)時(shí),按照正常邏輯需要25個(gè)碼道,如此多的碼道傳輸需要25根電纜,為了克服多電纜傳輸?shù)谋锥耍枰?strong>SSI(Synchronous-Serial Interface EIARS-422A or RS-485)通過(guò)串口來(lái)實(shí)現(xiàn)通信,僅需要4根電纜即可以傳輸所有數(shù)據(jù)。更少的電纜數(shù)擴(kuò)展了編碼器信號(hào)的傳輸距離。數(shù)據(jù)的傳輸格式或者是二進(jìn)制或者是格雷碼,靠SSI控制器的時(shí)鐘來(lái)控制觸發(fā),不但可以輸出絕對(duì)位置,還可以輸出增量信號(hào)數(shù)據(jù)(最高脈沖數(shù)可達(dá)512)。
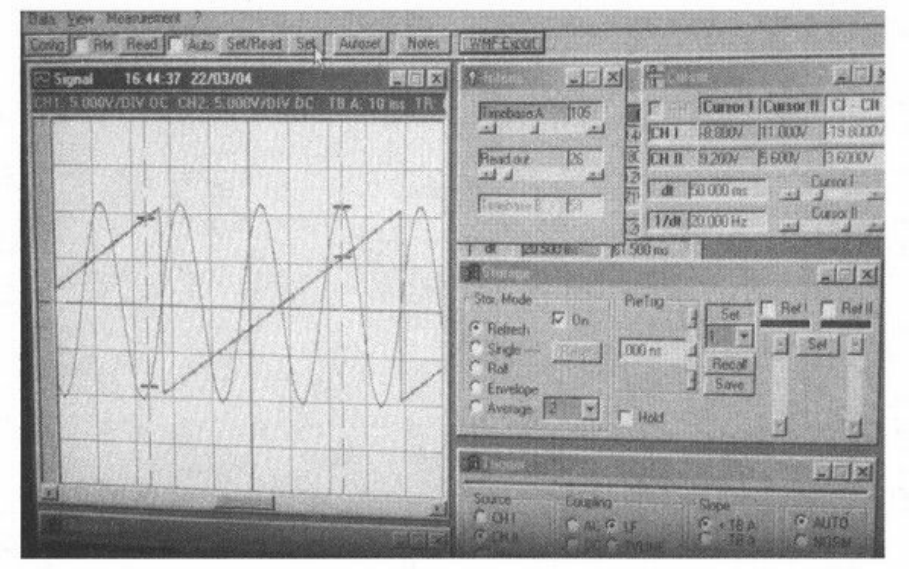
如果驅(qū)動(dòng)SSI編碼器,要求上位機(jī)對(duì)接收到的信號(hào)進(jìn)行計(jì)算,如下圖所示。
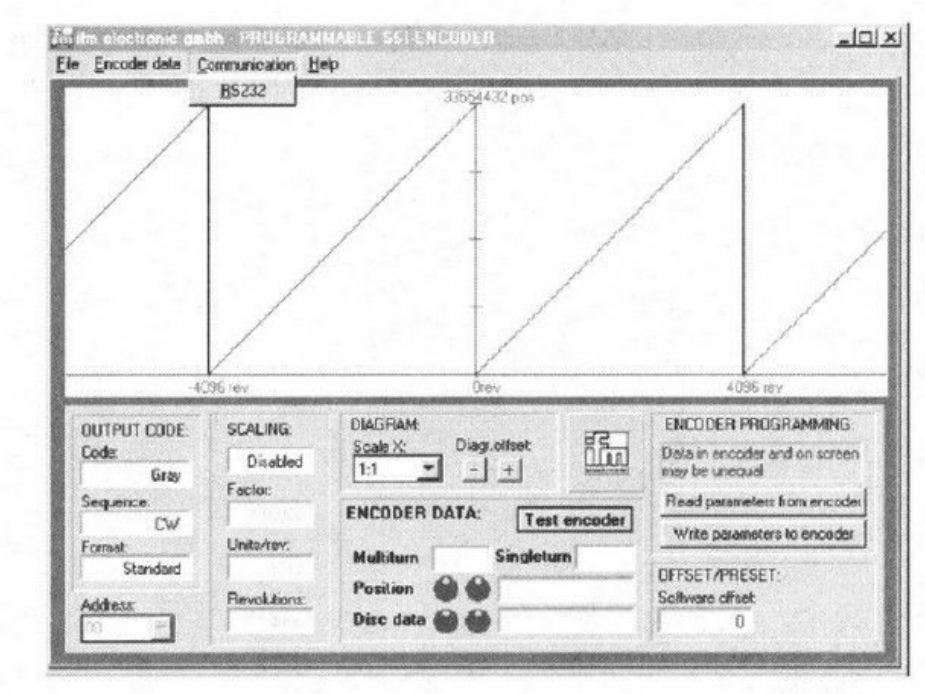
SSI計(jì)算軟件
在Sinamics S120的控制單元中,也具有SSI的接收編程軟件,如下圖所示。
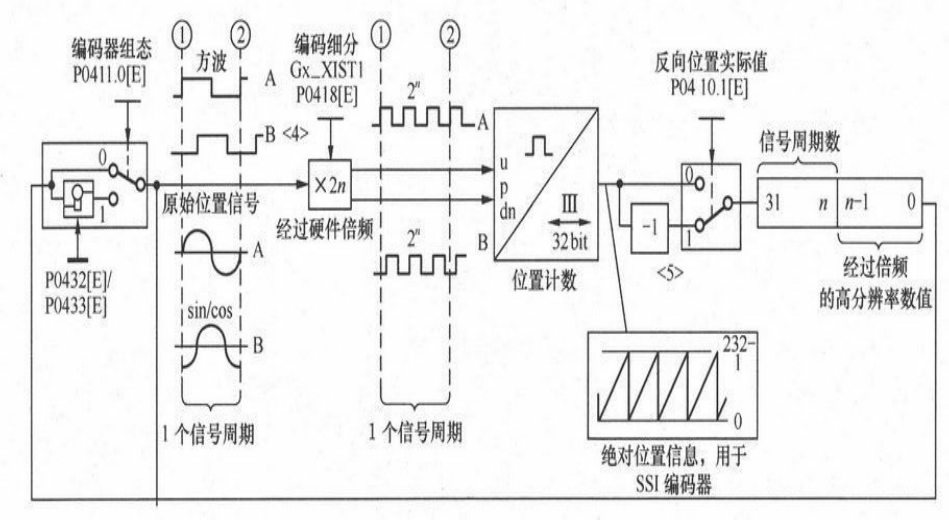
S120中的編碼器接收功能圖
除了SSI接口的編碼器,西門(mén)子公司及其他公司都提供了帶Profibus-DP接口的編碼器,可以同控制器通過(guò)DP方式傳輸數(shù)據(jù)。傳輸數(shù)據(jù)的速率以及編碼器的地址文件要參考相應(yīng)編碼器的profile文件。
正/余弦編碼器
與脈沖編碼器相同,正弦編碼器通常有A、B兩個(gè)信號(hào)輸出通道,它的特點(diǎn)在于能夠?qū)⒚恳粋€(gè)正/余弦波形進(jìn)一步細(xì)化。細(xì)化是根據(jù)正弦的電壓值來(lái)進(jìn)行計(jì)算的,這樣能夠增強(qiáng)編碼器的分辨率,如下圖所示。
A、B:0.6~1.2V(峰峰值)
~1V(峰峰值):指正弦增量編碼器信號(hào)的幅值為1V,信號(hào)尖峰到參考點(diǎn)的電壓值約為0.5V,如下圖所示。
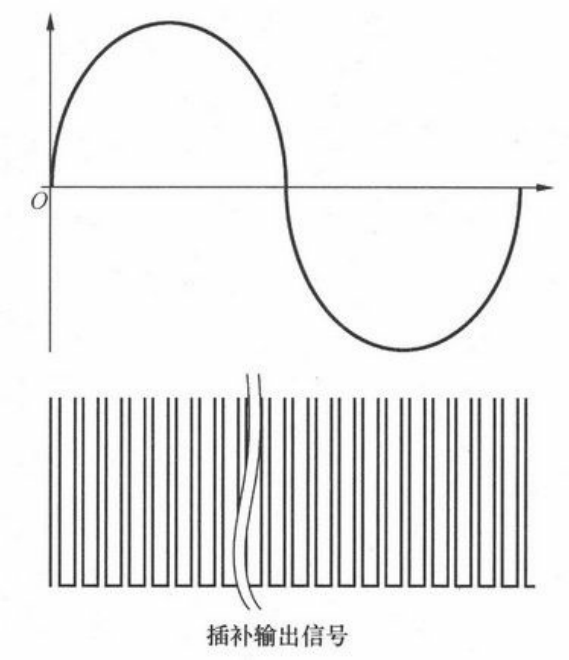
正弦編碼器分割
轉(zhuǎn)換碼道:通常在選擇編碼器時(shí)在A/BR后面還會(huì)發(fā)現(xiàn)標(biāo)有C/D的字符,這是正弦編碼器的兩個(gè)輔助的正/余弦碼道,用來(lái)提供1轉(zhuǎn)內(nèi)的絕對(duì)位置,同時(shí)為驅(qū)動(dòng)器提供了電機(jī)的磁極位置,以實(shí)現(xiàn)更精確的控制,也就是前面提到的混合式編碼器,如下圖所示。
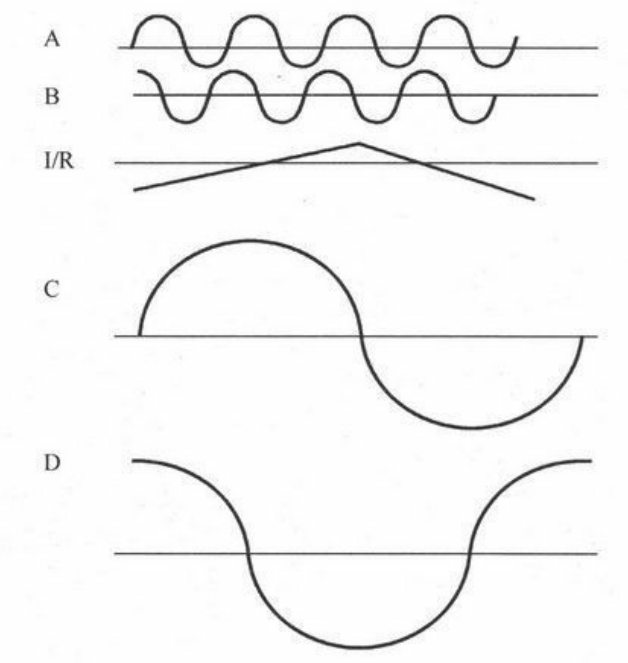
正弦編碼器的C/D通道
另外,正/余弦編碼器的模擬通道也可以與串口通道同時(shí)并存,如下圖所示。
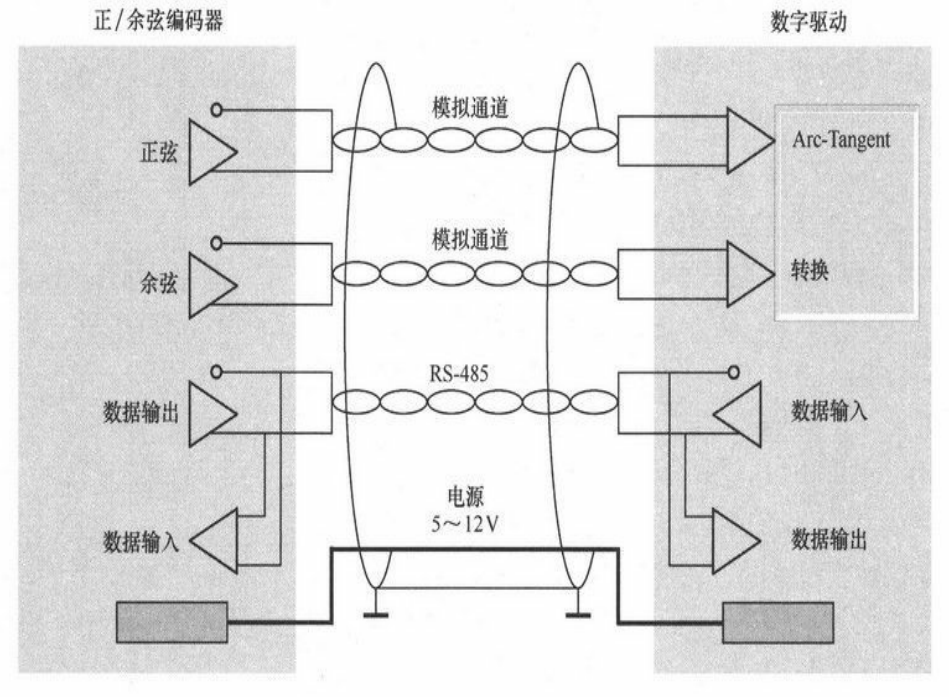
帶數(shù)據(jù)通道的正/余弦編碼器
可以說(shuō),正/余弦編碼器是增量式與絕對(duì)值編碼器的結(jié)合。其中絕對(duì)位置采用串口通信的方式傳輸,而正/余弦信號(hào)仍采用模擬信號(hào)傳輸,因?yàn)槟M信號(hào)傳輸要求的頻率帶寬比較窄,容易實(shí)現(xiàn),可以在高速的情況下保證長(zhǎng)距離傳輸。
編碼器的相位調(diào)整
在對(duì)電機(jī)進(jìn)行閉環(huán)控制的過(guò)程中,必須要知道同步電機(jī)的磁極位置,包括增量式編碼器、絕對(duì)值編碼器、正/余弦編碼器、旋轉(zhuǎn)變壓器等。很多情況下編碼器都是集成到電機(jī)內(nèi)部的,所以在安裝編碼器時(shí)就要注意編碼器相位的調(diào)整,實(shí)際上就是要保證編碼器的零脈沖與磁極的方向保持一致。
對(duì)于輸出信號(hào)為方波信號(hào)的增量式編碼器,除了兩相正交方波脈沖輸出信號(hào)A和B及零位信號(hào)Z外,還具備互差120°的電子換相信號(hào)U、V、W,U、V、W各自的每轉(zhuǎn)周期數(shù)與電機(jī)轉(zhuǎn)子的磁極對(duì)數(shù)一致。帶換相信號(hào)的增量式編碼器的U、V、W信號(hào)的相位與轉(zhuǎn)子磁極相位的對(duì)齊方法如下:
①用一個(gè)直流電源給電機(jī)的UV繞組通以小于額定電流的直流電,U入,V出,將電機(jī)軸定向至一個(gè)平衡位置;
②用示波器觀察編碼器的U信號(hào)和Z信號(hào);
③調(diào)整編碼器轉(zhuǎn)軸與電機(jī)軸的相對(duì)位置;
④一邊調(diào)整,一邊觀察編碼器U信號(hào)跳變沿和Z信號(hào),直到Z信號(hào)穩(wěn)定在高電平上(在此默認(rèn)Z信號(hào)的常態(tài)為低電平),鎖定編碼器與電機(jī)的相對(duì)位置關(guān)系;
⑤來(lái)回扭轉(zhuǎn)電機(jī)軸,手移開(kāi)后,若電機(jī)軸每次自由回復(fù)到平衡位置時(shí),Z信號(hào)都能穩(wěn)定在高電平上,則對(duì)齊有效。
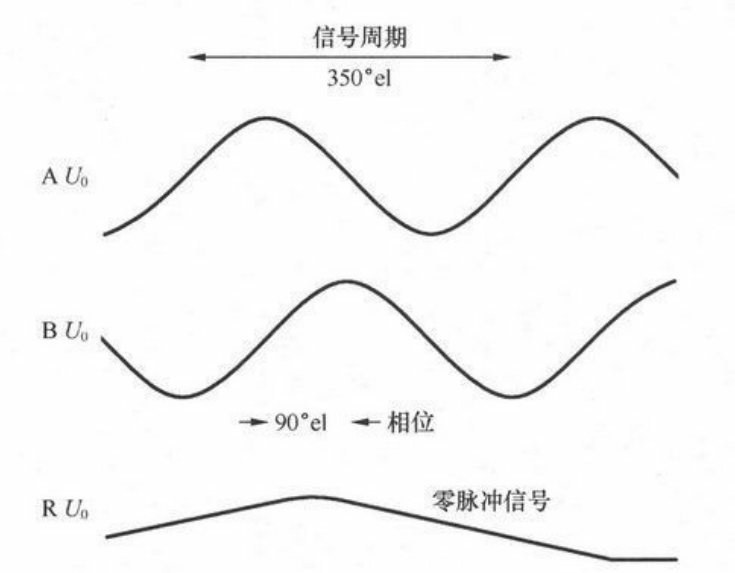
對(duì)于帶有C、D通道的編碼器,除了具備上述正交的正、余弦信號(hào)外,還具備一對(duì)一圈只出現(xiàn)一個(gè)信號(hào)周期的相互正交的1V(峰峰值)的正弦型C、D信號(hào),如果以C信號(hào)為正弦波,則D信號(hào)為余弦波。此外,帶C、D信號(hào)的正/余弦編碼器的C、D信號(hào)經(jīng)過(guò)細(xì)分后,還可以提供較高的每轉(zhuǎn)絕對(duì)位置信息,比如每轉(zhuǎn)2048個(gè)絕對(duì)位置,因此帶C、D信號(hào)的正/余弦編碼器可以視作一種模擬式的單圈絕對(duì)值編碼器。這種編碼器的極點(diǎn)對(duì)齊方式如下:
①用一個(gè)直流電源給電機(jī)的UV繞組通以小于額定電流的直流電,U入,V出,將電機(jī)軸定向至一個(gè)平衡位置;
②用示波器觀察正/余弦編碼器的C信號(hào)波形;
③調(diào)整編碼器轉(zhuǎn)軸與電機(jī)軸的相對(duì)位置;
④一邊調(diào)整,一邊觀察C信號(hào)波形,直到由低到高的過(guò)零點(diǎn)準(zhǔn)確出現(xiàn)在電機(jī)軸的定向平衡位置處,鎖定編碼器與電機(jī)的相對(duì)位置關(guān)系;
⑤來(lái)回扭轉(zhuǎn)電機(jī)軸,手移開(kāi)后,若電機(jī)軸每次自由回復(fù)到平衡位置時(shí),過(guò)零點(diǎn)都能準(zhǔn)確復(fù)現(xiàn),則對(duì)齊有效。
對(duì)于沒(méi)有C、D通道的編碼器,可以讀取磁極位置處編碼器實(shí)際反饋的位置值,然后將此值寫(xiě)到編碼器內(nèi)部的存儲(chǔ)器中,如帶EnDat模式的絕對(duì)值編碼器中。
對(duì)于旋轉(zhuǎn)編碼器,有正弦和余弦兩組線圈(相差90°),在轉(zhuǎn)子感應(yīng)高頻信號(hào)的同時(shí)隨電機(jī)旋轉(zhuǎn)并在定子上感應(yīng)出正弦和余弦信號(hào)。根據(jù)正弦和余弦波形可以算出α角度,從而確定轉(zhuǎn)子的位置,如下圖所示。
旋轉(zhuǎn)變壓器磁極位置對(duì)齊
調(diào)整方法:示波器的一個(gè)通道連接旋變的定子電壓信號(hào),另一個(gè)通道連接編碼器位置信號(hào),用其他裝置帶動(dòng)電機(jī)旋轉(zhuǎn),使電機(jī)處于發(fā)電狀態(tài),調(diào)整編碼器位置使其處于定子電壓的零點(diǎn)。另外,可以通過(guò)驗(yàn)證旋變的正弦信號(hào)包絡(luò)過(guò)零點(diǎn)與電機(jī)的UV線反電動(dòng)勢(shì)波形由低到高的過(guò)零點(diǎn)重合的方式來(lái)對(duì)齊。
編碼器的倍頻
編碼器的脈沖數(shù)決定著位置控制與速度控制的精度,對(duì)于2048脈沖的編碼器,在不倍頻的情況下,每個(gè)脈沖對(duì)應(yīng)的精度為0.175°,因此,用此編碼器回饋的位置精度肯定要大于0.175°,很難實(shí)現(xiàn)精確定位。控制精度要求很高、反應(yīng)速度要求很快的精密儀器伺服系統(tǒng),編碼器的分辨率要求更高。
不管編碼器的信號(hào)是正弦信號(hào),還是脈沖信號(hào),都可以對(duì)此信號(hào)進(jìn)一步細(xì)分,也就是倍頻。倍頻是通過(guò)編碼器信號(hào)的接收裝置將編碼器的每個(gè)脈沖進(jìn)一步細(xì)分,通過(guò)正、余弦信號(hào)的高倍率細(xì)分技術(shù),可以使正/余弦編碼器獲得比原始信號(hào)周期更為細(xì)密的名義檢測(cè)分辨率,比如2048線的正/余弦編碼器經(jīng)2048細(xì)分后,就可以達(dá)到每轉(zhuǎn)400多萬(wàn)線的名義檢測(cè)分辨率。當(dāng)前很多歐美伺服廠家都提供這類(lèi)高分辨率的伺服系統(tǒng),而國(guó)內(nèi)廠家尚不多見(jiàn)。
對(duì)于細(xì)分來(lái)說(shuō),也存在著誤差。細(xì)分的誤差不但影響電機(jī)的定位精度,還會(huì)給電機(jī)帶來(lái)高頻的噪聲信號(hào)。例如,在約翰內(nèi)斯·海德漢撰寫(xiě)的《滿足伺服驅(qū)動(dòng)高動(dòng)態(tài)性能的旋轉(zhuǎn)編碼器》一文中就對(duì)細(xì)分誤差影響作了進(jìn)一步的分析。
編碼器的特征參數(shù)
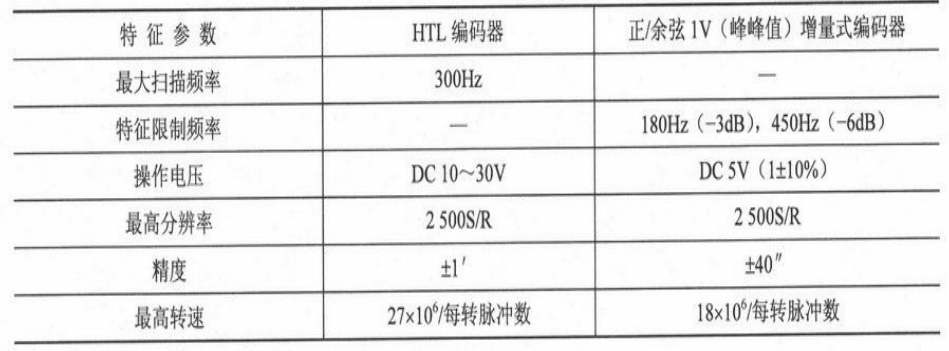
通常情況下,編碼器的特征參數(shù)包括分辨率、最高支持轉(zhuǎn)速、精度、操作電壓。增量式編碼器的參數(shù)有最大掃描頻率,絕對(duì)值編碼器還有傳輸速率、通信位數(shù)。增量式編碼器特征參數(shù)如下表所示。
增量式編碼器特征參數(shù)
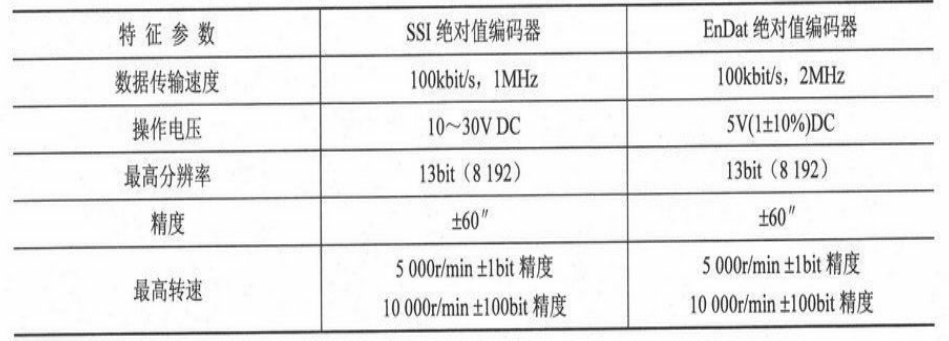
絕對(duì)值編碼器特征參數(shù)如下表所示。
帶通信的絕對(duì)值編碼器特征參數(shù)
幾種類(lèi)型編碼器特性如下圖所示。
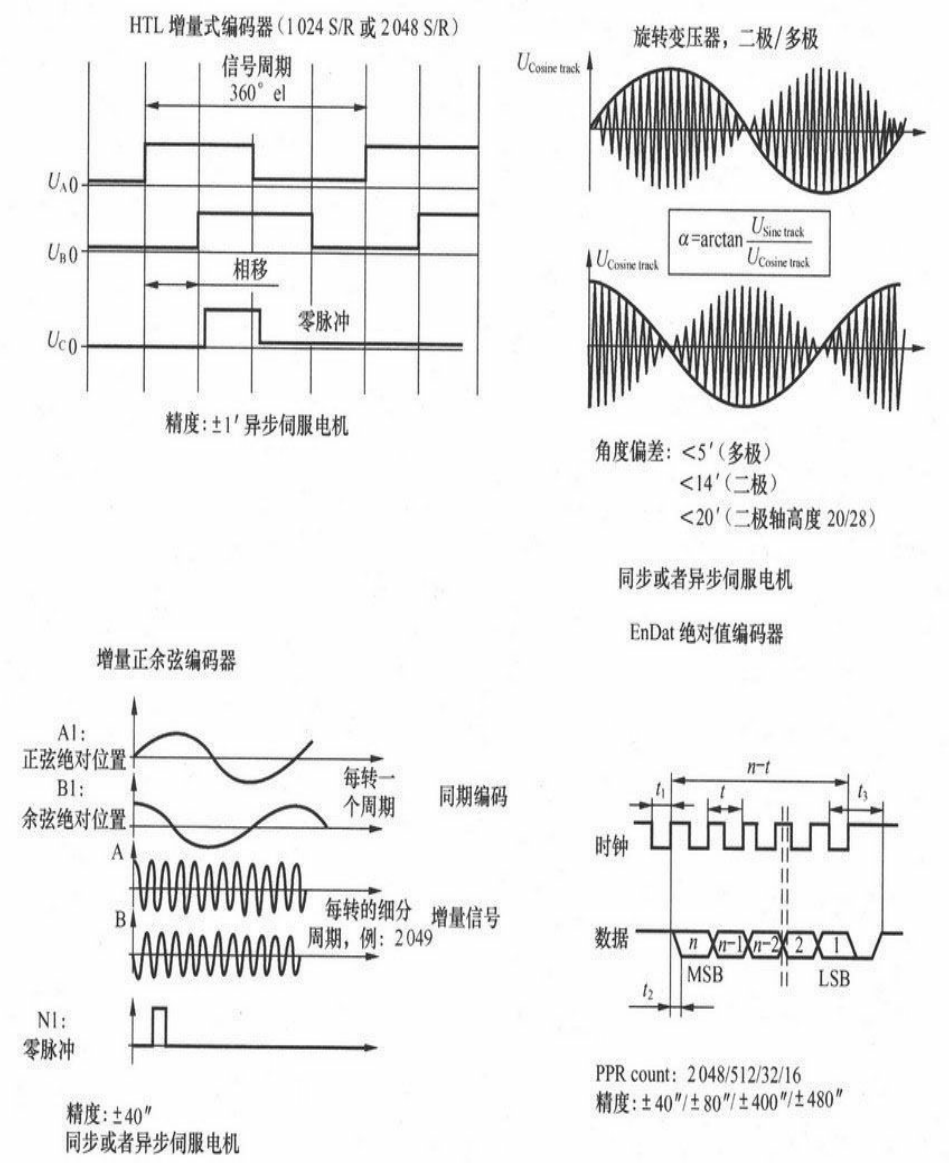
幾種類(lèi)型編碼器特性
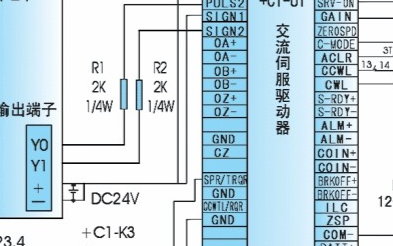
驅(qū)動(dòng)器與編碼器的連接
(1)Sinamics S120
S120是西門(mén)子新一代驅(qū)動(dòng)產(chǎn)品,既可以驅(qū)動(dòng)伺服軸又可以驅(qū)動(dòng)矢量軸。當(dāng)驅(qū)動(dòng)矢量軸時(shí),對(duì)于DC/AC設(shè)備,可以通過(guò)SMC30來(lái)連接TTL/HTL以及SSI接口編碼器來(lái)接收;對(duì)于AC/AC設(shè)備,有專門(mén)的脈沖編碼器接口X23來(lái)接收編碼器信號(hào)。當(dāng)用于伺服控制時(shí),可以接的編碼器類(lèi)型有旋轉(zhuǎn)變壓器、增量式(正/余弦)編碼器以及絕對(duì)值編碼器。
S120的控制單元CU320可以同其他模塊實(shí)現(xiàn)Drive-CLiQ通信,可以從西門(mén)子生產(chǎn)的帶Drive-CLiQ接口的電機(jī)直接讀取數(shù)據(jù),如下圖所示。
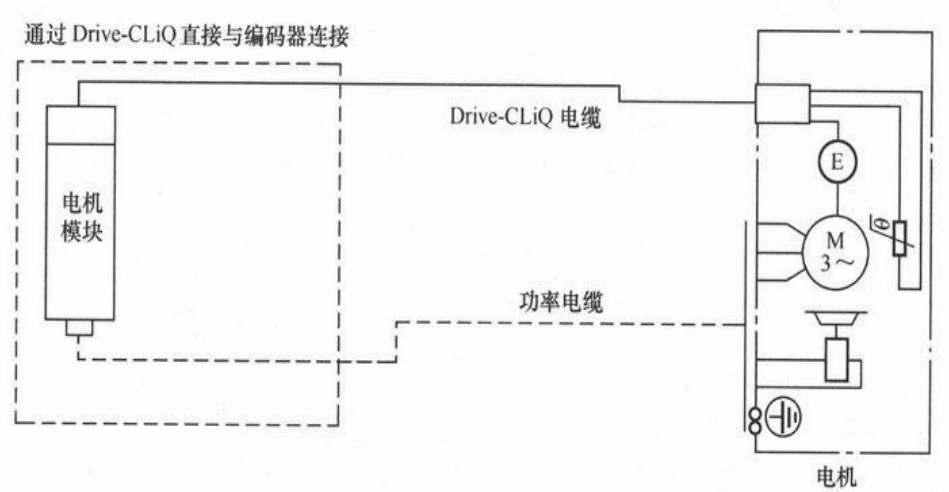
帶Drive-CLiQ接口的電機(jī)連接圖
對(duì)于沒(méi)有Dirve-CLiQ接口的編碼器,驅(qū)動(dòng)器可以通過(guò)接口模塊SMC來(lái)接收編碼器信號(hào),如下圖所示。
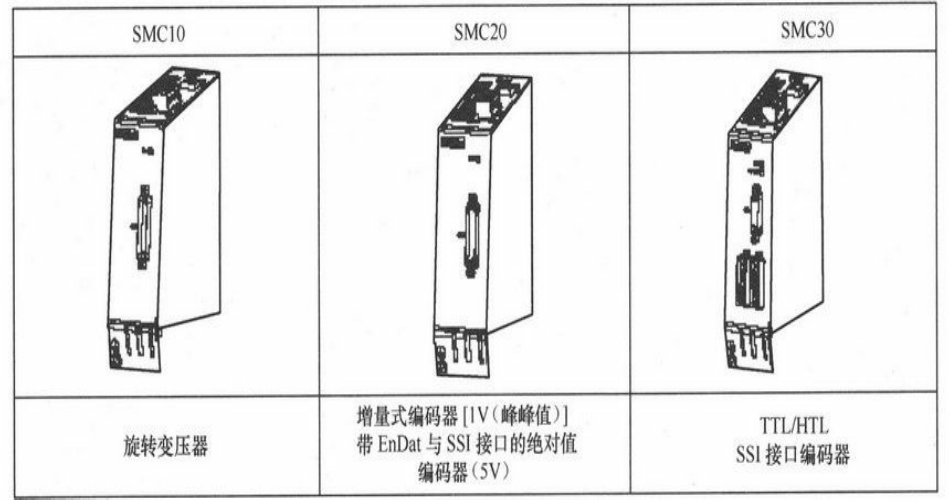
3種編碼器適配器SMC
補(bǔ)充:Sinamics G150變頻器可以通過(guò)SMC30來(lái)連接編碼器,從而實(shí)現(xiàn)矢量控制。連接方法如下圖所示。
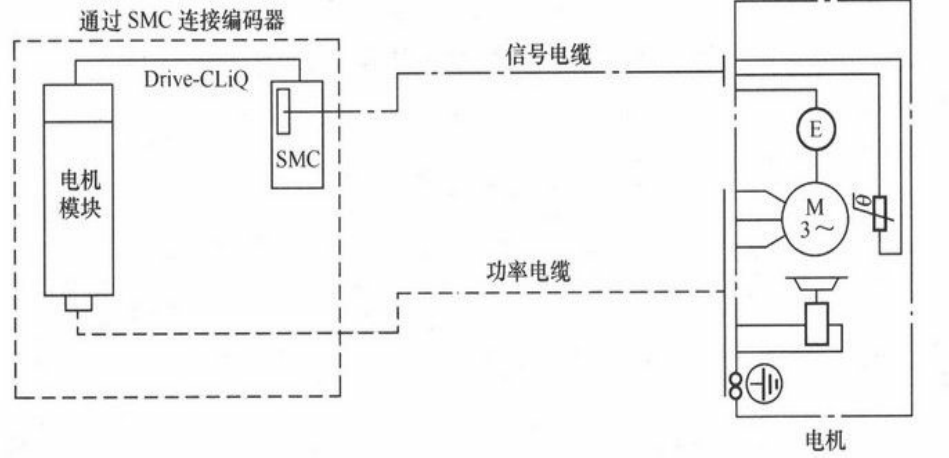
不帶Drive-CLiQ接口的電機(jī)連接圖
另外,不是集成在電機(jī)內(nèi)的編碼器可以通過(guò)SME接口模塊來(lái)接收,下圖是3種SME接口的示意圖。
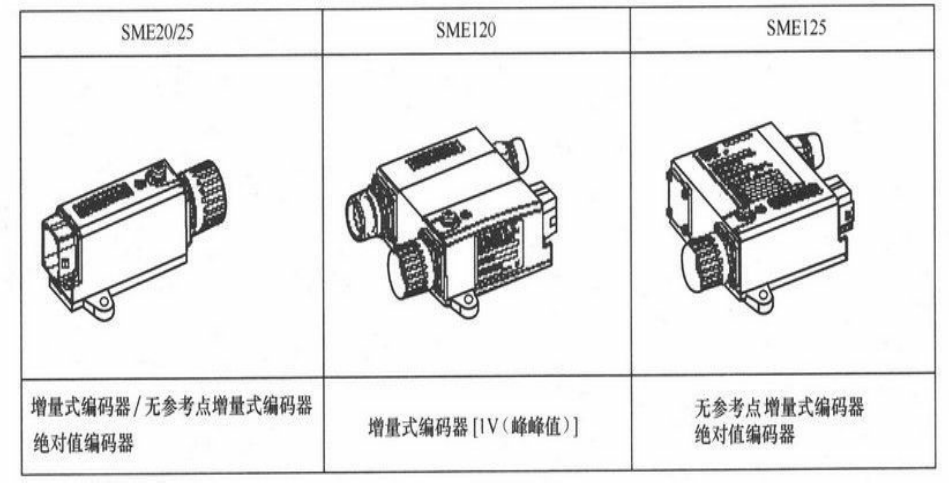
編碼器接收適配器SME
外接編碼器接口的電機(jī)連接圖如下圖所示。
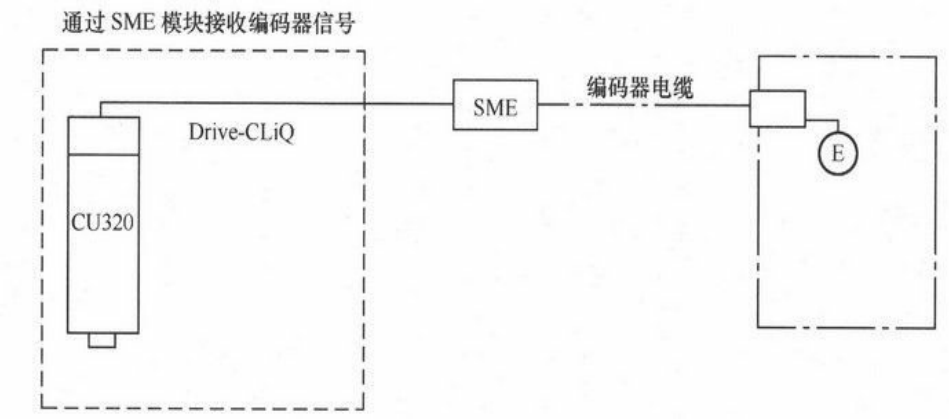
外接編碼器接口的電機(jī)連接圖
2)編碼器組態(tài)
在西門(mén)子電機(jī)內(nèi)部集成了編碼器的情況下,集成了Drive-CLiQ接口的電機(jī)靠預(yù)埋在電機(jī)內(nèi)部的芯片存儲(chǔ)電機(jī)與編碼器數(shù)據(jù),因此,在組態(tài)的過(guò)程中只需選擇通過(guò)Drive-CLiQ讀取。下圖所示為Starter中的電機(jī)組態(tài)。
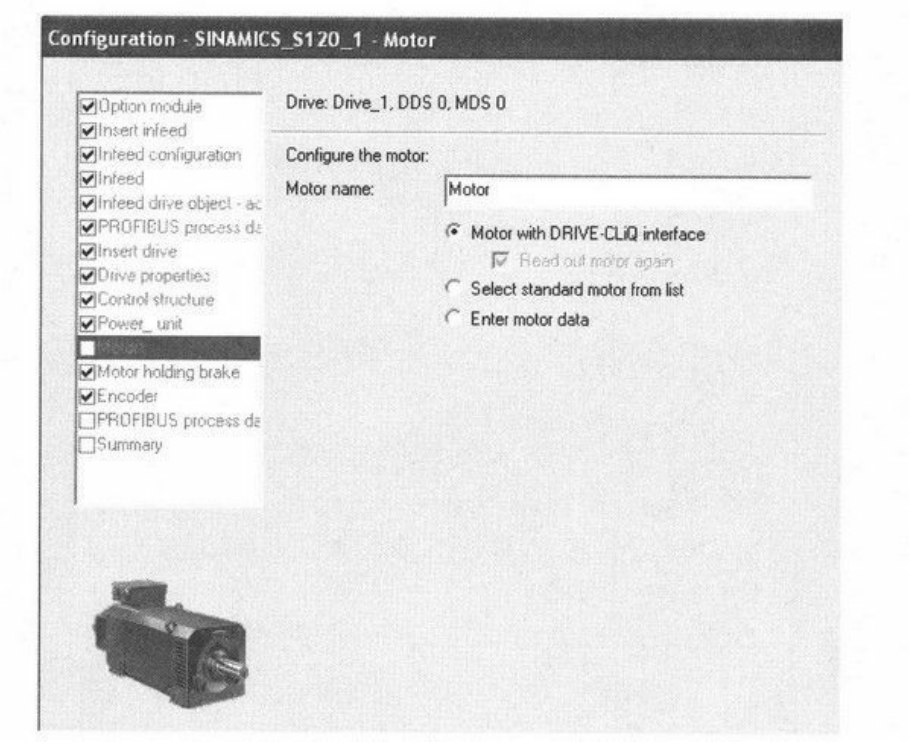
Starter中的電機(jī)組態(tài)
對(duì)于內(nèi)部沒(méi)有集成Drive-CLiQ接口的電機(jī),在選定電機(jī)后,還要根據(jù)電機(jī)訂貨號(hào)選擇相應(yīng)的編碼器。下圖所示為Starter中的編碼器組態(tài)。
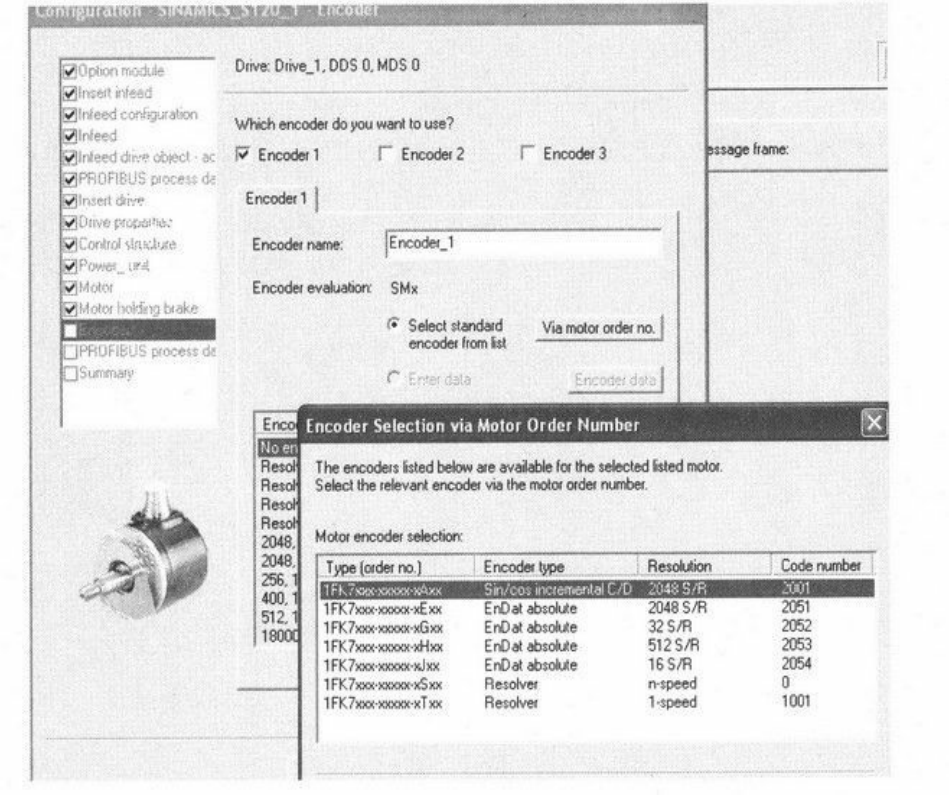
Starter中的編碼器組態(tài)
對(duì)于內(nèi)部不集成編碼器或者非西門(mén)子電機(jī),則需要單獨(dú)設(shè)定編碼器的數(shù)據(jù)。下圖所示為Starter中的第三方編碼器組態(tài)。
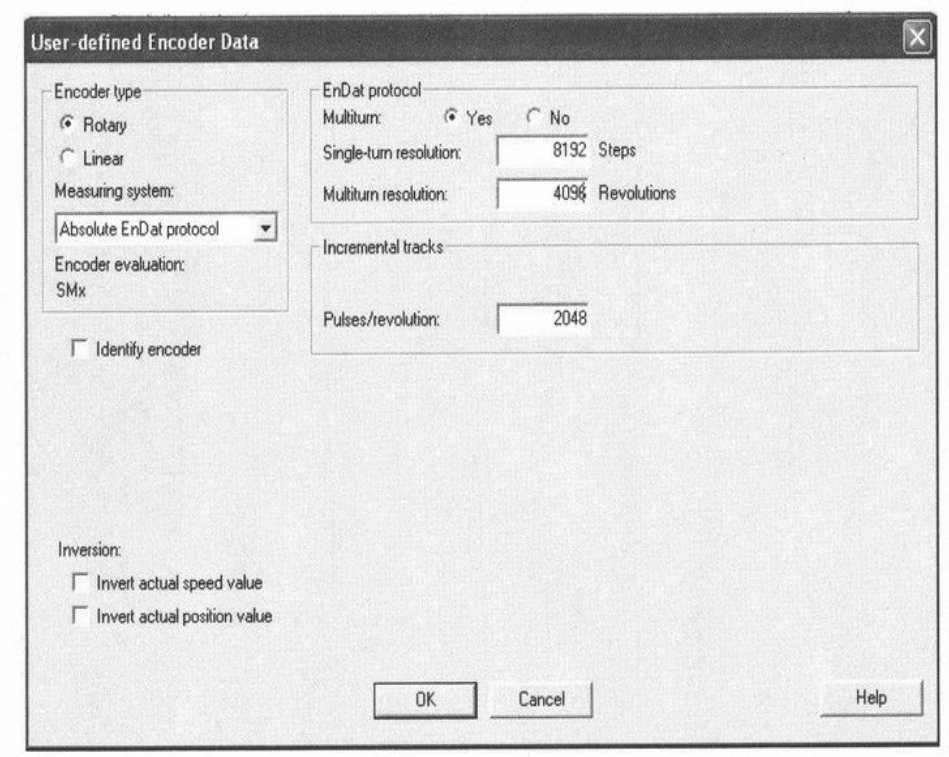
Starter中的第三方編碼器組態(tài)
除了旋轉(zhuǎn)編碼器,S120可以接收直線編碼器的信號(hào),通常與直線電機(jī)配合使用。直線編碼器也有絕對(duì)值與增量式之分,參數(shù)設(shè)置同旋轉(zhuǎn)編碼器類(lèi)似。
(3)帶有Profibus-DP接口的編碼器
除了常規(guī)接口編碼器,西門(mén)子還為用戶提供了帶有Profibus-DP接口的編碼器,即集成了脈沖接收處理回路的編碼器。這種編碼器可以通過(guò)從站的方式與Profibus-DP的主站進(jìn)行通信。這時(shí)編碼器作為一個(gè)標(biāo)準(zhǔn)的從站,與主站通過(guò)報(bào)文進(jìn)行數(shù)據(jù)交換。硬件組態(tài)如下圖所示。
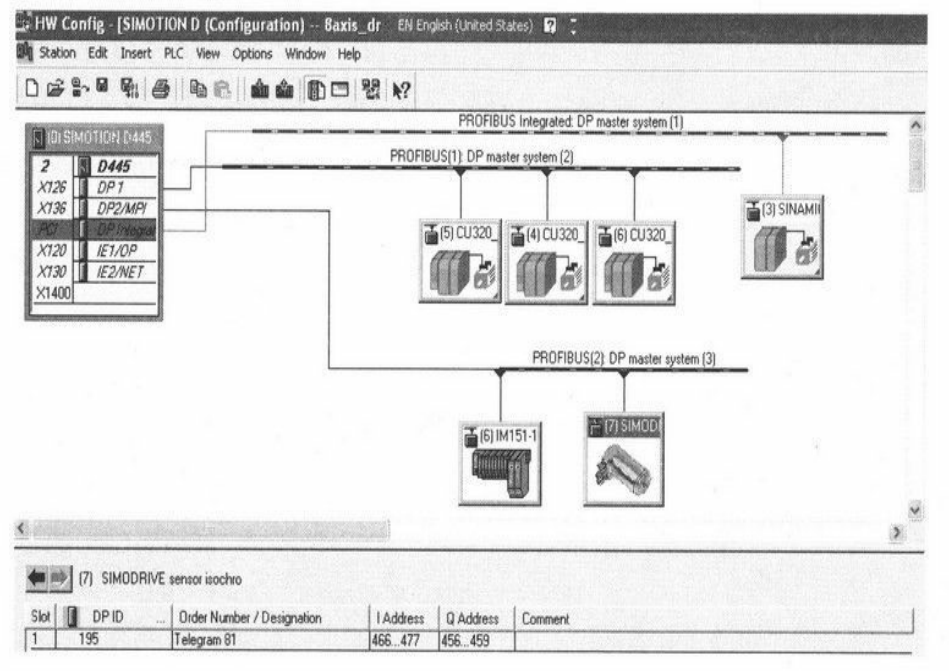
編碼器作為從站的硬件組態(tài)
審核編輯:劉清
-
控制器
+關(guān)注
關(guān)注
112文章
16381瀏覽量
178295 -
變頻器
+關(guān)注
關(guān)注
251文章
6560瀏覽量
144920 -
上位機(jī)
+關(guān)注
關(guān)注
27文章
942瀏覽量
54838 -
時(shí)鐘信號(hào)
+關(guān)注
關(guān)注
4文章
449瀏覽量
28579 -
伺服編碼器
+關(guān)注
關(guān)注
5文章
15瀏覽量
3105
原文標(biāo)題:伺服編碼器的特點(diǎn)與連接
文章出處:【微信號(hào):旺材伺服與運(yùn)動(dòng)控制,微信公眾號(hào):旺材伺服與運(yùn)動(dòng)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
伺服電機(jī)編碼器原理(伺服電機(jī)編碼器幾根線以及接線圖)
伺服電機(jī)自帶編碼器為什么還要外加編碼器?
伺服電機(jī)編碼器維修
伺服電機(jī)編碼器原理_伺服電機(jī)編碼器種類(lèi)
直流伺服電機(jī)控制器和編碼器有什么關(guān)系呢?
伺服電機(jī)編碼器基礎(chǔ)簡(jiǎn)介
伺服電機(jī)編碼器基礎(chǔ)簡(jiǎn)介
伺服電機(jī)編碼器基礎(chǔ)簡(jiǎn)介
伺服電機(jī)編碼器
伺服電機(jī)編碼器分類(lèi)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論