") 用于分離模式MEMS陀螺儀的低閃爍噪聲自動幅度控制的ASIC
用于分離模式MEMS陀螺儀的低閃爍噪聲自動幅度控制的ASIC
摘要:
本文介紹了一種用于分離式MEMS陀螺儀的全差分、低閃爍噪聲、自動幅度控制(AAC)的ASIC。先分析了AAC中閃爍噪聲對陀螺儀偏置不穩(wěn)定性的影響。使用斬波器穩(wěn)定的幅度檢測器和誤差放大器來消除它們的閃爍噪聲。二階環(huán)路濾波器可以降低來自可變增益放大器(VGA)的閃爍噪聲。ASIC采用TSMC0.35μmCMOS工藝制造,功耗為1mW,電源電壓為3.3V。實驗結(jié)果表明,陀螺儀驅(qū)動的幅度中的閃爍噪聲分量大大降低。
1.介紹
如今,具有CMOS讀出電路接口的MEMS陀螺儀由于其低成本,低功耗和小尺寸的優(yōu)點在消費(fèi)者和汽車市場中被廣泛采用。然而,受其長期誤差的限制,MEMS陀螺儀僅適用于這些應(yīng)用,它們的輸出的角速率積分精度不是主要考慮因素,例如智能手機(jī),游戲控制器和相機(jī)穩(wěn)定系統(tǒng)。另一方面,在慣性導(dǎo)航系統(tǒng)(INS)中,MEMS陀螺儀的集成誤差決定整體的航向精度。為了定期校正MEMS陀螺儀的集成誤差,GPS在微慣性測量單元(MIMU)中是絕對必要的。隨著新興地區(qū)的興起,需要長時間的獨立慣性導(dǎo)航,如精確的車輛導(dǎo)航和增強(qiáng)現(xiàn)實技術(shù)。因此,需要進(jìn)一步改善MEMS陀螺儀的長期誤差。
根據(jù)Allan方差,MEMS陀螺儀的輸出誤差可分為三個主要分量,即角度隨機(jī)游走(ARW),偏置不穩(wěn)定性和速率隨機(jī)游走(RRW)。ARW主要由MEMS陀螺儀及其CMOS前端的白噪聲貢獻(xiàn),通常決定陀螺儀的寬帶和短期穩(wěn)定性。RRW主要描述其由于環(huán)境因素(例如溫度和應(yīng)力)引起的漂移。偏置不穩(wěn)定性代表陀螺儀的最終精度,其受到CMOS讀出電路中閃爍噪聲的限制。
對于車輛導(dǎo)航和增強(qiáng)現(xiàn)實,當(dāng)GPS或其他絕對定位傳感器的信息丟失時,純慣性導(dǎo)航的操作時間約為1-10分鐘。已經(jīng)證明,MEMS陀螺儀的偏置不穩(wěn)定性在該時間尺度期間導(dǎo)致了其整體的集成誤差。然而,MEMS陀螺儀的偏置不穩(wěn)定性的來源尚未得到很好的研究,并且沒有報道相應(yīng)的解決方案。
本文首先分析了AAC中閃爍噪聲與陀螺儀偏置不穩(wěn)定性之間的關(guān)系。隨后,設(shè)計斬波穩(wěn)定幅度檢測器和誤差放大器以消除其閃爍噪聲,并采用二階環(huán)路濾波器來衰減來自VGA的閃爍噪聲。實驗結(jié)果驗證了所提出的AAC大大降低了陀螺儀驅(qū)動幅度中的閃爍噪聲,并改善了其偏置不穩(wěn)定性。
2. AAC的系統(tǒng)架構(gòu)和噪聲模型
圖1給出了MEMS陀螺儀驅(qū)動環(huán)路的典型框圖。在驅(qū)動回路中,驅(qū)動器前端將MEMS諧振器的運(yùn)動電流轉(zhuǎn)換為電壓,并提供所需的增益以使振蕩啟動。當(dāng)幅度檢測器檢測到Vx的即時振蕩幅度,并將其與某個參考電壓Vref進(jìn)行比較時,來自誤差放大器的產(chǎn)生的誤差信號Vc通過VGA調(diào)節(jié)驅(qū)動環(huán)路增益,以實現(xiàn)穩(wěn)定的振蕩幅度,用作感測通道的解調(diào)參考,以區(qū)分輸入角速率和正交誤差。
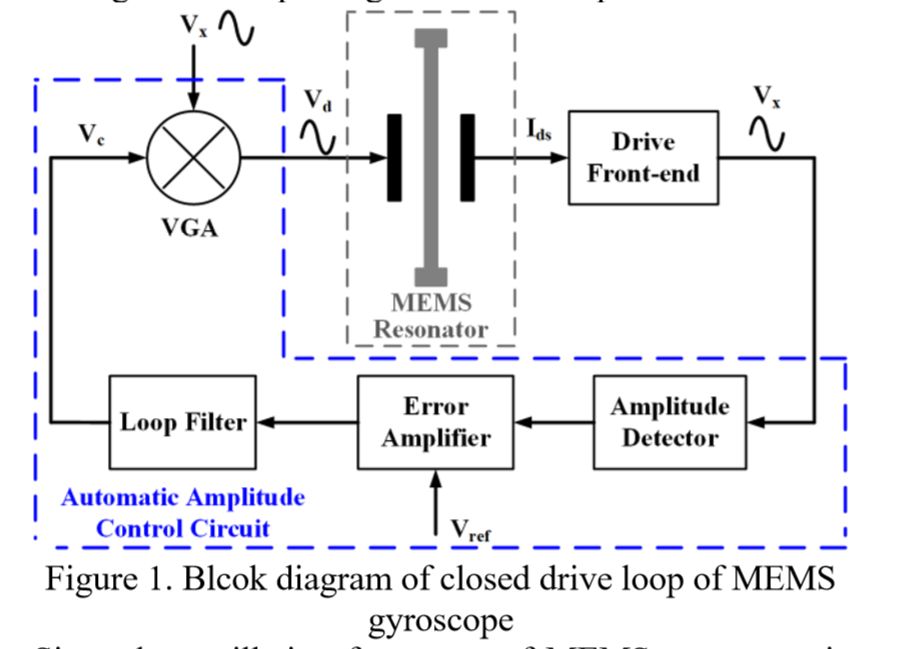
由于MEMS陀螺儀的振蕩頻率約為10-100kHz,閃爍噪聲標(biāo)準(zhǔn)CMOS工藝的轉(zhuǎn)角頻率約為1kHz,因此固有地消除了驅(qū)動前端中閃爍噪聲的影響。相反,AAC中的電路來處理陀螺儀的驅(qū)動幅度,即近直流信號,幅度檢測器,誤差放大器和VGA的閃爍噪聲直接與驅(qū)動幅度混合。在感測通道中進(jìn)行相位敏感解調(diào)后,驅(qū)動振幅中的閃爍噪聲出現(xiàn)在陀螺儀的角速率輸出中,成為其偏置不穩(wěn)定性的主要原因。圖2給出了MEMS陀螺儀驅(qū)動環(huán)路的系統(tǒng)級噪聲模型。當(dāng)僅考慮其振幅時,H(s)代表MEMS諧振器的等效傳遞函數(shù),其可表示為,
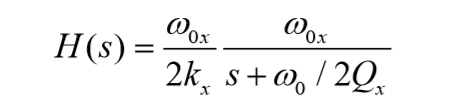
其中ω0x,Qx和kx表示陀螺儀的驅(qū)動諧振器的諧振頻率,品質(zhì)因數(shù)和剛度。此外,Rx,KA,Ke,Kc代表驅(qū)動前端,幅度檢測器,誤差放大器和VGA的增益,L(s)是環(huán)路濾波器的傳遞函數(shù)。NA(s),Nref(s),NE(s),NV(s)代表幅度檢測器,電壓參考,誤差放大器和VGA的噪聲源。
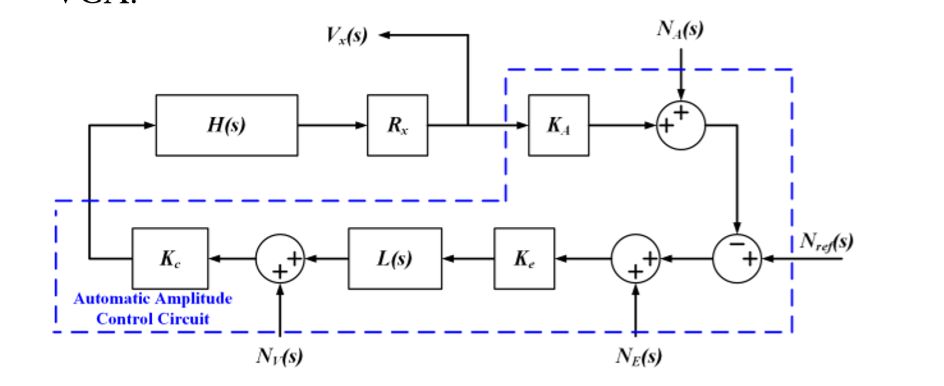
圖2. MEMS陀螺儀驅(qū)動環(huán)路的噪聲模型
當(dāng)RxKAKeKcL(s)H(s)>> 1時,Vx(驅(qū)動前端輸出電壓)的輸出噪聲可以推導(dǎo)為。:

從等式(2)可知,來自VGA的噪聲由環(huán)路濾波器整形,其他噪聲分量在KA≈1時直接轉(zhuǎn)換為幅度噪聲。因此,NA(s),Nref(s),NE(s)和NV(s)中的閃爍噪聲應(yīng)該最小化,以改善陀螺儀的偏置不穩(wěn)定性。
3.電路實現(xiàn)
根據(jù)等式(2),為了消除NA(s)和NE(s)的閃爍噪聲,在幅度檢測器和誤差放大器中應(yīng)采用斬波器穩(wěn)定。圖3給出了具有斬波穩(wěn)定性的幅度檢測器的示意圖。它的核心模塊是一對交流電壓跟隨器,它們在亞閾值區(qū)域偏置,只跟隨輸入信號的負(fù)半周期。R1和R2提取輸入共模電壓。只有一個交流電壓跟隨器輸出輸入信號的幅度,而另一個輸出共模電壓同時輸出共模電壓,從而使其與差分工作模式兼容。

斬波幅度信號饋入誤差放大器,其原理圖如圖4所示。其輸入級是一個gm單元,它將輸入電壓轉(zhuǎn)換為電流。通過將兩個gm單元的輸出連接在一起,在電流域中完成振蕩幅度和參考電壓的比較。在斬波器4流到環(huán)路濾波器之前,誤差電流被斬波器4變頻到DC范圍。
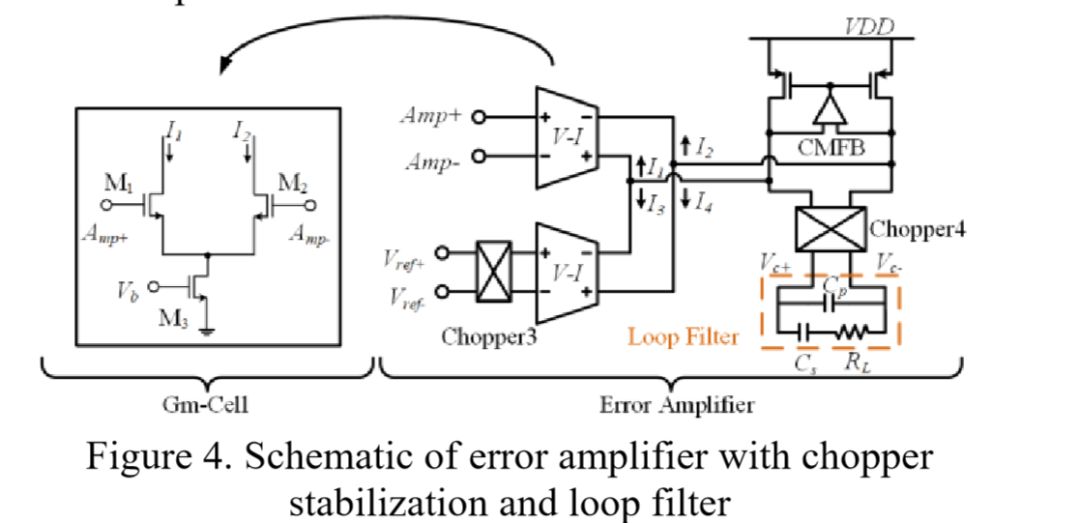
根據(jù)等式(2),在該設(shè)計中采用二階環(huán)路濾波器,通過利用等式(3)中給出的積分分量來消除VGA的閃爍噪聲。
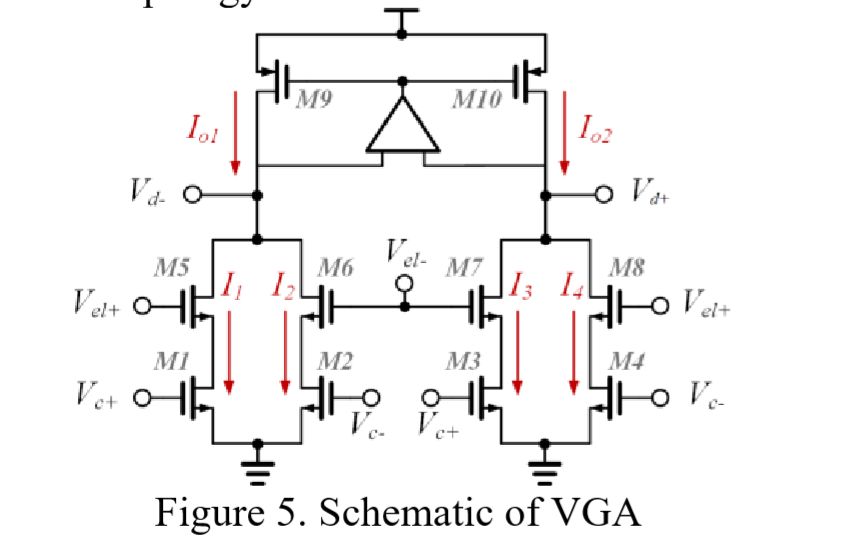
采用二階環(huán)路濾波器后,VGA的設(shè)計限制大大減輕,其主要考慮因素是減小其擴(kuò)展空間以擴(kuò)大其調(diào)節(jié)范圍。圖5顯示了這項工作中采用的VGA。與廣泛使用的Gilbert單元VGA相比,M1-M4在線性區(qū)域工作,尾電流源被消除,以增加其輸出擺幅。誤差放大器輸出Vc調(diào)節(jié)M1-M4的抗衰減電阻,從而調(diào)節(jié)VGA輸出幅度Vd,以保持穩(wěn)定的振蕩幅度。 此外,可以通過全差分拓?fù)鋵崿F(xiàn)更好的線性度。
4.測試結(jié)果
CMOS讀出電路采用TSMC0.35μm工藝制造,其芯片照片如圖6所示。它通過定制PCB與電壓為3.3V的MEMS陀螺儀連接。
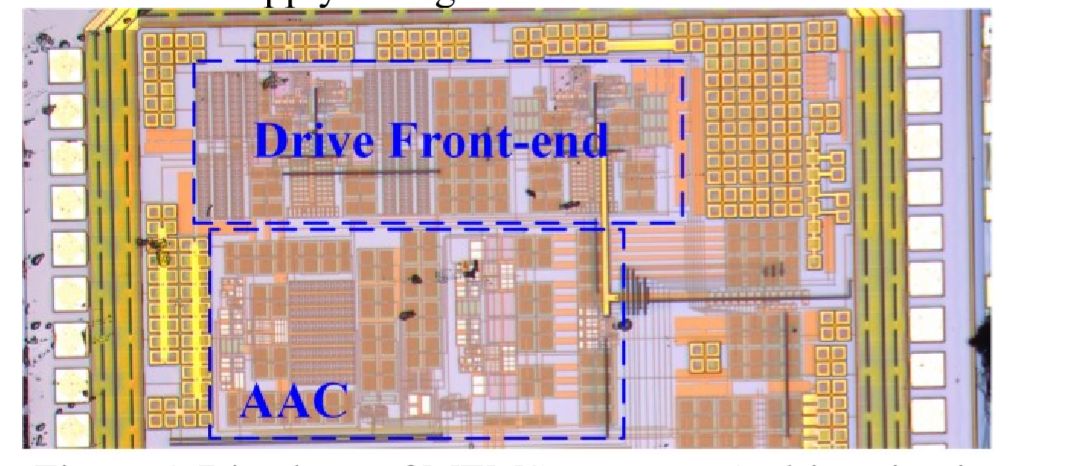
圖6.是MEMS陀螺儀驅(qū)動電路的模擬照。MEMS陀螺儀的振蕩啟動過程如圖7所示。它表明AAC可以穩(wěn)定振蕩幅度,啟動時間小于1s。

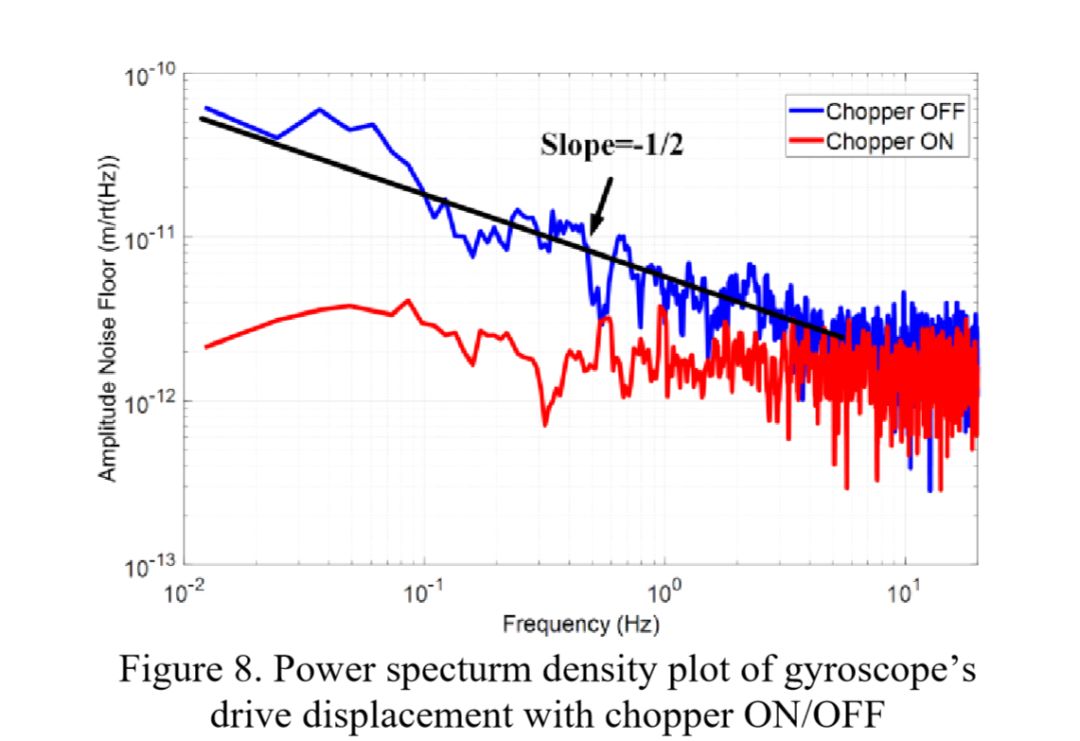
圖7為振蕩信號Vx的測試啟動過程。為了研究AAC的閃爍噪聲衰減效應(yīng),采用NI-DAQ板記錄Vx的幅度,并將其轉(zhuǎn)換為陀螺儀的機(jī)械位移以繪制其功率譜密度。如圖8所示,當(dāng)AAC中的斬波器關(guān)閉時,可以觀察到明顯的閃爍噪聲分量,并且當(dāng)斬波器開啟時幾乎看不到閃爍噪聲,這肯定了所提出的低閃爍噪聲AAC的有效性。
5.結(jié)論
本文提出了一種用于MEMS陀螺儀的低閃爍噪聲自動幅度控制ASIC,它采用TSMC0.35μm工藝制造,具有3.3V電源。采用斬波器穩(wěn)定來消除幅度檢測器和誤差放大器的閃爍噪聲以及二階環(huán)路濾波器衰減VGA產(chǎn)生的閃爍噪聲。實驗結(jié)果表明,該AAC可以大大降低MEMS陀螺儀振蕩幅度中的閃爍噪聲。
-
斬波器
+關(guān)注
關(guān)注
0文章
63瀏覽量
9150 -
電源電壓
+關(guān)注
關(guān)注
2文章
989瀏覽量
23969 -
CMOS工藝
+關(guān)注
關(guān)注
1文章
58瀏覽量
15672 -
誤差放大器
+關(guān)注
關(guān)注
9文章
98瀏覽量
34948 -
MEMS陀螺儀
+關(guān)注
關(guān)注
6文章
51瀏覽量
22640
發(fā)布評論請先 登錄
相關(guān)推薦
利用MEMS陀螺儀實現(xiàn)低噪聲反饋控制設(shè)計
基于MEMS陀螺儀的低噪聲反饋控制設(shè)計
MEMS陀螺儀中主要噪聲源的預(yù)測和管理
mems陀螺儀的特點和工作原理解析
MEMS陀螺儀中主要噪聲源的預(yù)測和管理
如何采用MEMS陀螺儀設(shè)計低噪聲反饋控制?
MEMS陀螺儀技術(shù)原理_三軸陀螺儀技術(shù)原理

MEMS陀螺儀可否取代光纖陀螺儀技術(shù)

淺談MEMS陀螺儀技術(shù) MEMS是否取代光纖陀螺儀技術(shù)
預(yù)測和管理MEMS陀螺儀中的關(guān)鍵噪聲源
什么是MEMS陀螺儀?
采用MEMS陀螺儀的低噪聲反饋控制設(shè)計方案






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論