") CODESYS可視化案例—雙軸位置同步控制
CODESYS可視化案例—雙軸位置同步控制
在運(yùn)動控制過程中,有時需要控制兩個運(yùn)動軸在某個特定位置進(jìn)行調(diào)整,最終主從軸在另外一個特定的位置達(dá)到運(yùn)動的同步。
這樣的控制如果采用機(jī)械機(jī)構(gòu)來實(shí)現(xiàn)將是較為復(fù)雜的,用程序則相對比較容易,特別是集成了相關(guān)運(yùn)動控制模塊的系統(tǒng),例如Codesys,編程實(shí)現(xiàn)這些運(yùn)動控制功能是非常簡單的。
Codesys中的常用運(yùn)動控制和管理模塊
MC_Power使能、MC_Home回零、MC_Stop停機(jī)、MC_Halt暫停、MC_Jog點(diǎn)動、MC_MoveVelocity勻速運(yùn)動、MC_MoveAbsolute運(yùn)動到絕對位置(角度)、MC_MoveRelative運(yùn)動到相對位置(相對當(dāng)前位置的角度值)、MC_GearIn以電子齒輪方式從軸耦合到主軸、MC_GearOut解耦電子齒輪、MC_GearInPos在特定位置以電子齒輪方式從軸耦合到主軸......
在此就不一一列舉。可以到庫管理器中查詢運(yùn)動控制指令及其參數(shù)和用法。
本例主要演示 雙軸位置同步控制 :
變量定義如下:
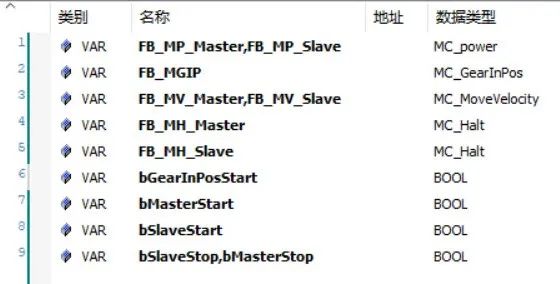
程序如下:

變量定義小技巧:
可以把同類型變量定義在一行當(dāng)中,以","隔開即可。這樣可以減少代碼行數(shù),提升閱讀效率。但如此定義的變量將不能通過“拖曳方式”添加到梯形圖中。
變量監(jiān)測小技巧:
在仿真條件下,當(dāng)可視化界面中的按鈕點(diǎn)擊時,如果按鈕行為是tapper形式的,即類似于實(shí)體按鈕,那么鼠標(biāo)松開后關(guān)聯(lián)邏輯變量會恢復(fù)到初始值,導(dǎo)致難以監(jiān)測相關(guān)邏輯變量的變化。
此時可以將可視化界面拖動到一邊,使得點(diǎn)擊按鈕時,PLC程序中變量不會被遮擋,這樣就可以觀察到變量變化與鼠標(biāo)動作的關(guān)聯(lián)了。
下面是雙軸速度位置控制的仿真過程視頻,其中兩軸可停止在任意位置,然后啟動耦合,當(dāng)主軸運(yùn)動到角度30°時會自動進(jìn)行齒輪位置同步調(diào)整,在50°時進(jìn)入電子齒輪位置同步,主從兩軸實(shí)現(xiàn)齒輪耦合,同步運(yùn)動。
另外由于其中bGearInPosStart變量由于模塊的需要,需要一直保持true,才能保證主從軸正常耦合,因此對應(yīng)的MGIP按鈕行為需要設(shè)置為默認(rèn)的toggler方式,也就是類似于開關(guān),按下后會自鎖。
-
plc
+關(guān)注
關(guān)注
5022文章
13449瀏覽量
467326 -
仿真器
+關(guān)注
關(guān)注
14文章
1020瀏覽量
84153 -
運(yùn)動控制
+關(guān)注
關(guān)注
4文章
599瀏覽量
33084 -
CoDeSys
+關(guān)注
關(guān)注
11文章
40瀏覽量
18771 -
同步控制器
+關(guān)注
關(guān)注
0文章
10瀏覽量
7491
發(fā)布評論請先 登錄
相關(guān)推薦
VirtualLab Fusion中的可視化設(shè)置
VirtualLab Fusion應(yīng)用:光波導(dǎo)k域布局可視化(“神奇的圓環(huán)”)
光學(xué)系統(tǒng)的3D可視化
什么是大屏數(shù)據(jù)可視化?特點(diǎn)有哪些?
可視化圖表組件-“雙跨”平臺 BI 數(shù)據(jù)大屏 #數(shù)據(jù)可視化 #可視化圖表 #BI報表 #駕駛艙
智慧能源可視化監(jiān)管平臺——助力可視化能源數(shù)據(jù)管理

智慧樓宇可視化的優(yōu)點(diǎn)
如何實(shí)現(xiàn)園區(qū)大屏可視化?

態(tài)勢數(shù)據(jù)可視化技術(shù)有哪些
智慧大屏是如何實(shí)現(xiàn)數(shù)據(jù)可視化的?

大屏數(shù)據(jù)可視化的作用和意義
三維可視化數(shù)據(jù)大屏的設(shè)計原理和技巧
數(shù)據(jù)可視化:企業(yè)數(shù)字化建設(shè)效果的呈現(xiàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論