") 機(jī)器視覺學(xué)習(xí)筆記:攝像機(jī)標(biāo)定技術(shù)
機(jī)器視覺學(xué)習(xí)筆記:攝像機(jī)標(biāo)定技術(shù)
攝像機(jī)標(biāo)定的目的:三維重建
空間物體表面某點(diǎn)的三維幾何位置與其在圖像中對應(yīng)點(diǎn)之間的相互關(guān)系是由攝像機(jī)成像的幾何模型決定的,這些幾何模型參數(shù)就是攝像機(jī)參數(shù),為了得到這些參數(shù)而進(jìn)行的實(shí)驗(yàn)與計(jì)算的過程稱為攝像機(jī)標(biāo)定。
在標(biāo)定過程中通常要利用數(shù)學(xué)方法對從數(shù)字圖像中獲得的數(shù)據(jù)進(jìn)行處理。通過這些數(shù)學(xué)處理,可以得到攝像機(jī)的內(nèi)部和外部參數(shù)。
一、成像幾何模型
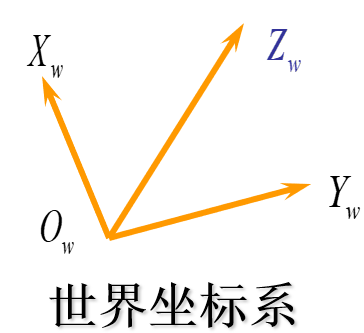
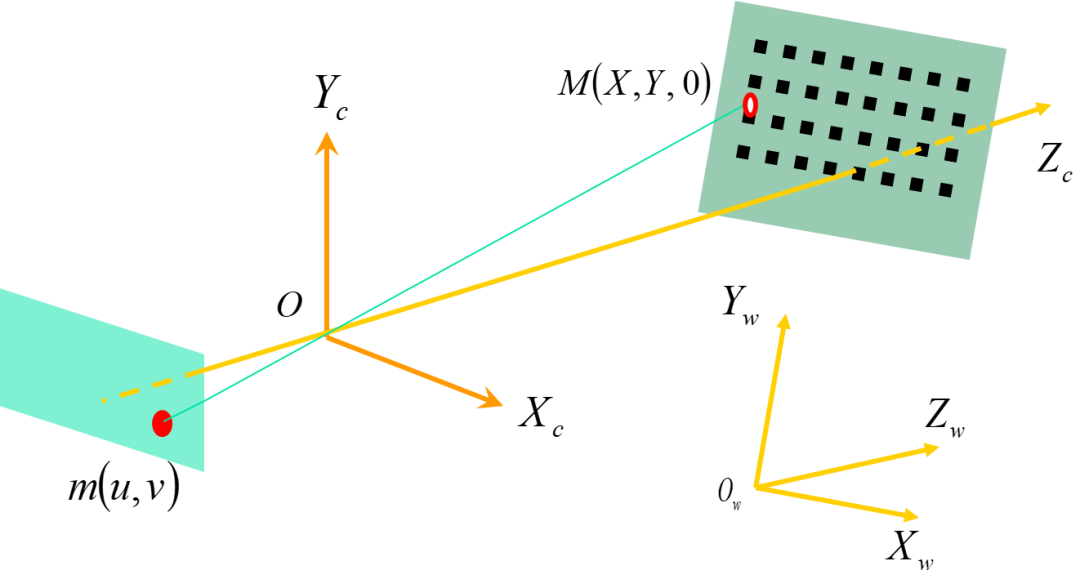
1.世界坐標(biāo)系
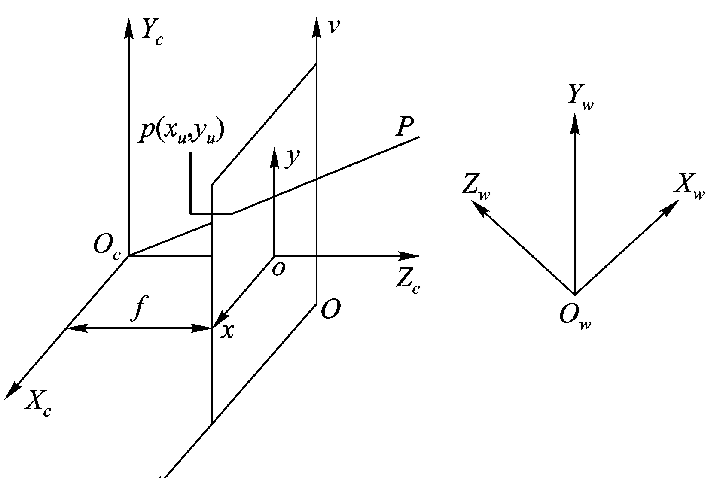
2.攝像機(jī)坐標(biāo)系
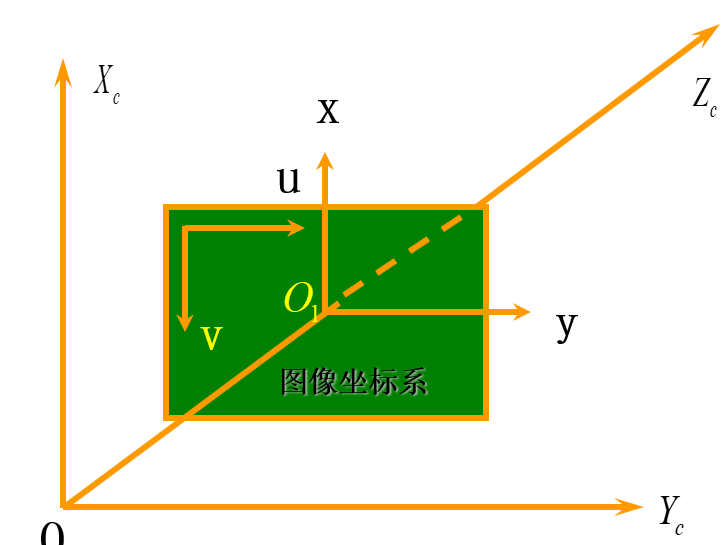
3.圖像坐標(biāo)系
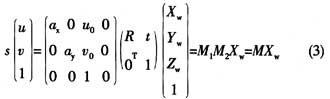
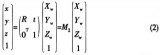
M1只與攝像機(jī)內(nèi)部結(jié)構(gòu)有關(guān),稱為攝像機(jī)內(nèi)部參數(shù);M2只與攝像機(jī)相對于世界坐標(biāo)系的方位有關(guān),稱為攝像機(jī)外部參數(shù);X為空間點(diǎn)在世界坐標(biāo)系下的齊次坐標(biāo),M為矩陣,稱為透視變換矩陣。
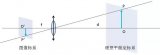
4.空間點(diǎn)與像點(diǎn)的非線性關(guān)系分析
由于攝像機(jī)的光學(xué)成像系統(tǒng)與理論模型之間的差異,二維圖像存在著不同程度的非線性變形,目標(biāo)像點(diǎn)與理論成像點(diǎn)相比存在著多種類型的幾何畸變.
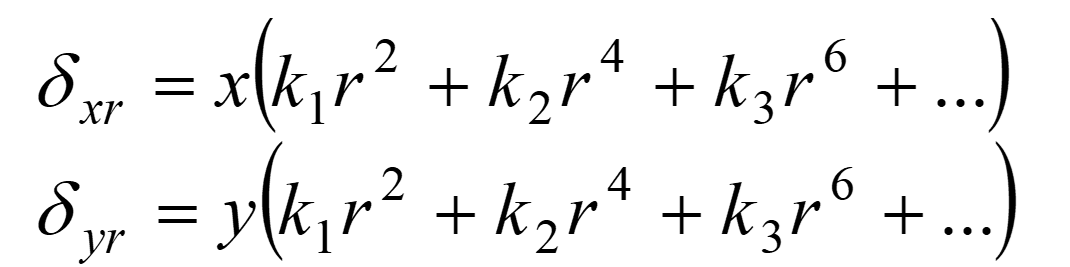
徑向畸變主要是由鏡頭形狀缺陷造成的,是關(guān)于攝像機(jī)鏡頭的主光軸對稱的。
正向畸變是枕形畸變,負(fù)向畸變是桶形畸變,其數(shù)學(xué)模型為:

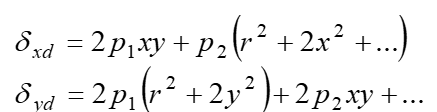
偏心畸變主要是由光學(xué)系統(tǒng)光心與幾何中心不一致造成的,即各透鏡的光軸中心不能嚴(yán)格共線。
這類畸變既含有徑向畸變,又含有切向畸變。
切向畸變的數(shù)學(xué)模型為:

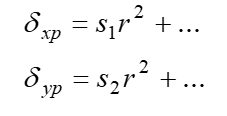
薄棱鏡畸變是由于鏡頭設(shè)計(jì)、制造缺陷或加工安裝誤差所造成的,如鏡頭與攝像機(jī)像面有很小的傾角等。
這類畸變相當(dāng)于在光學(xué)系統(tǒng)中附加了一個(gè)薄棱鏡,不僅會(huì)引起徑向偏差,而且引起切向誤差。
其數(shù)學(xué)模型為:

二、典型標(biāo)定方法
1.傳統(tǒng)攝像機(jī)標(biāo)定方法
優(yōu)點(diǎn):可以使用于任意的攝像機(jī)模型,標(biāo)定精度高。
不足:標(biāo)定過程復(fù)雜,需要高精度的已知結(jié)構(gòu)信息。在實(shí)際應(yīng)用中很多情況下無法使用標(biāo)定塊。
2.攝像機(jī)自標(biāo)定方法
特點(diǎn):僅依靠多幅圖像之間的對應(yīng)關(guān)系進(jìn)行標(biāo)定。
優(yōu)點(diǎn):僅需要建立圖像之間的對應(yīng),靈活性強(qiáng),潛在應(yīng)用范圍廣。
不足:非線性標(biāo)定,魯棒性不高。
3.傳統(tǒng)的攝像機(jī)標(biāo)定方法
利用已知的景物結(jié)構(gòu)信息。常用到標(biāo)定塊。
?利用最優(yōu)化算法的標(biāo)定方法
?利用攝像機(jī)變換矩陣的標(biāo)定方法
?兩步法
?雙平面標(biāo)定法
基本原理:
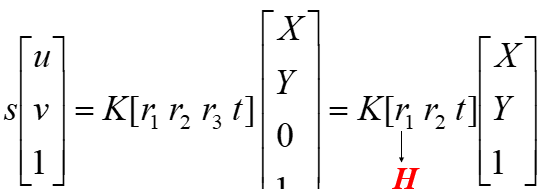
其中,K為攝像機(jī)的內(nèi)參數(shù)矩陣。由于攝像機(jī)有5個(gè)未知內(nèi)參數(shù),所以當(dāng)所攝取得的圖象數(shù)目大于等于3時(shí),就可以線性唯一求解出K。
張正友方法所用的平面模板
4.攝像機(jī)自標(biāo)定方法
利用本質(zhì)矩陣和基本矩陣的攝像機(jī)標(biāo)定方法;利用主動(dòng)系統(tǒng)控制攝像機(jī)作特定運(yùn)動(dòng)的自標(biāo)定方法(主動(dòng)視覺標(biāo)定方法)。
5.基于平面單應(yīng)矩陣的正交運(yùn)動(dòng)方法原理
t(1)、t(2)為攝像機(jī)一組正交的平移運(yùn)動(dòng),兩個(gè)單應(yīng)矩陣:
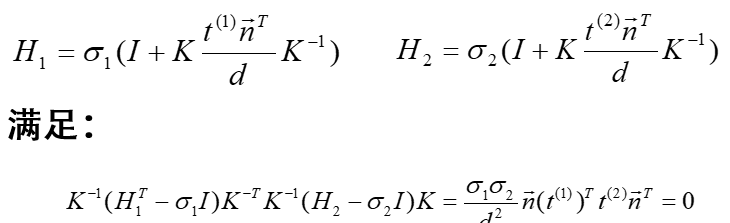
五組兩正交運(yùn)動(dòng)可完全求解5個(gè)內(nèi)參數(shù)。
本文來源于CSDN博主liutangplease
審核編輯:湯梓紅
-
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1596瀏覽量
60016 -
機(jī)器視覺
+關(guān)注
關(guān)注
161文章
4369瀏覽量
120282 -
坐標(biāo)系
+關(guān)注
關(guān)注
0文章
29瀏覽量
7305 -
三維重建
+關(guān)注
關(guān)注
0文章
26瀏覽量
9920 -
幾何模型
+關(guān)注
關(guān)注
0文章
4瀏覽量
6115
原文標(biāo)題:機(jī)器視覺(三):攝像機(jī)標(biāo)定技術(shù)
文章出處:【微信號:vision263com,微信公眾號:新機(jī)器視覺】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
基于Dragonboard 410c平臺(tái)的機(jī)器3D視覺—攝像機(jī)標(biāo)定原理
基于機(jī)器視覺的攝像機(jī)標(biāo)定理論與各種方法分析
【國外開源】STM32 機(jī)器人視覺攝像機(jī)OpenMV Cam設(shè)計(jì)(硬件+固件源碼等)
攝像機(jī)標(biāo)定理論是什么?其方法有哪些?
移動(dòng)機(jī)器人視覺系統(tǒng)與攝像機(jī)標(biāo)定
利用機(jī)器視覺的攝像機(jī)標(biāo)定方法研究
簡易攝像機(jī)標(biāo)定方法

基于OpenCV的單目攝像機(jī)標(biāo)定
基于OpenCV的雙目攝像機(jī)標(biāo)定
機(jī)器視覺中的攝像機(jī)標(biāo)定和自標(biāo)定分析
攝像機(jī)標(biāo)定技術(shù)及應(yīng)用
常見的機(jī)器人視覺伺服中的標(biāo)定技術(shù)有哪些

機(jī)器視覺的攝像機(jī)標(biāo)定技術(shù)你知道多少?
機(jī)器視覺中攝像機(jī)標(biāo)定的目的是什么
機(jī)器視覺系統(tǒng)中常用攝像機(jī)的分類






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論