 C-UAS(反無人機系統)的監視和偵察系統技術介紹
C-UAS(反無人機系統)的監視和偵察系統技術介紹
如何使用技術在天空中尋找有人駕駛和無人駕駛飛機的異同。監視和偵察的歷史源于軍事用途,與民用同行只有小規模的行動。“應用于當今技術的戰術和技術源于遙感領域。遙感有著悠久的歷史,因為它始于人類試圖從遠處看到和感知現象,并且(我們現在)經歷了從使用鴿子到氣球到飛機,再到衛星,再到UAS [無人機系統]的漫長旅程“(Nichols & Mumm,2018)
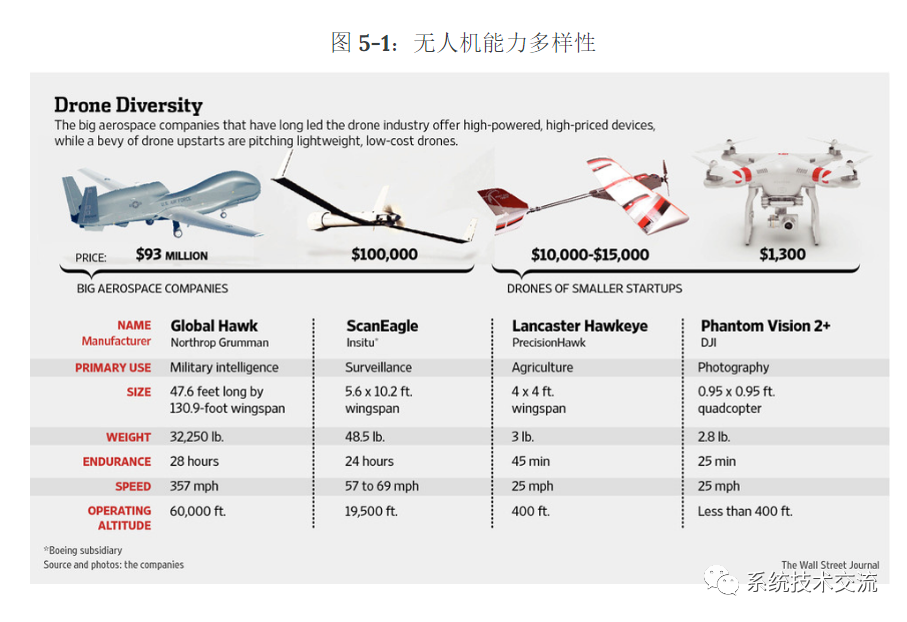
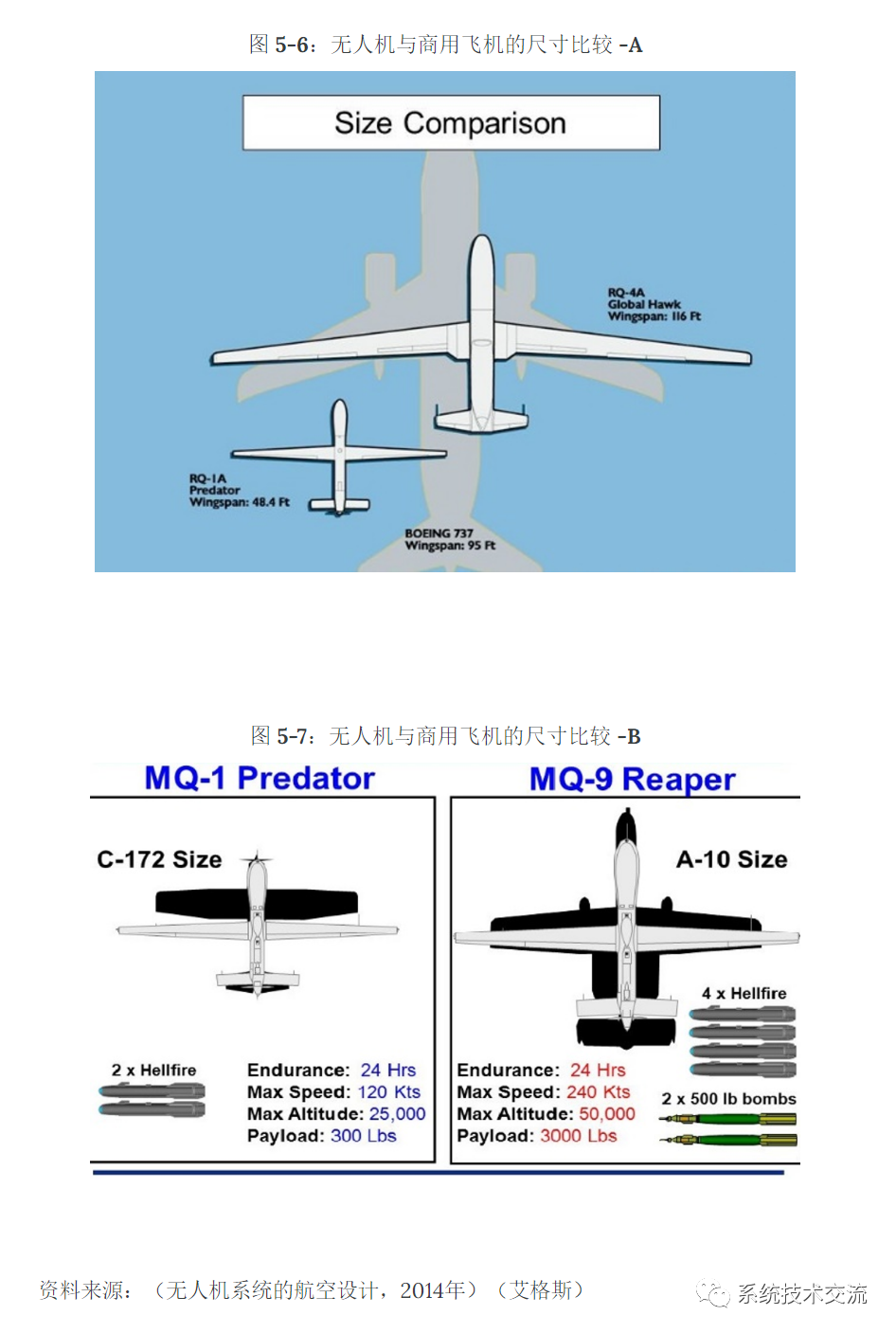
使用UAS或無人機(UAV)進行情報,監視和偵察是該技術最著名的應用之一。“絕大多數無人機純粹用于情報、監視和偵察(ISR)任務。在目前的軍事用途中,它們的范圍從翼展大于波音737客機的全球鷹,到重達幾克的納米直升機,以及介于兩者之間的所有點“(Lambeth,2006)。這一研究領域使我們在全世界的軍事移動、攻擊和防御以及民用調查和發展行動自由方面取得了進步。(尼科爾斯和媽媽,2018)
策略與監視和偵察中的正常思維過程幾乎是180度大度的,因為“目標”在廣闊的天空中,并不總是受到傳統有人駕駛飛機規則的約束,有時UAS技術發展如此之快,以至于反UAS(C-UAS)系統無法足夠快地適應。“C-UAS技術的擴散甚至可能加速使C-UAS系統無效的技術的發展,特別是在軍事環境中”(“反無人機技術的新世界”,2018年)。C-UAS技術有兩個主要功能,“第一個是識別或檢測無人機活動。第二個功能是攔截空域威脅或擊敗無人機。
根據韋氏詞典的說法,偵察的定義是“獲取信息的初步調查;尤其是對敵方領土的探索性軍事調查。(字典,2019)在歷史術語中,它是法語,意思是“承認”或來自古法語偵察或“承認”(監視,2019)。這種快速查看或調查的想法與監視的含義形成對比,監視的含義是“持續觀察一個地方、人、團體或正在進行的活動,以收集信息:專心觀察,監督和指導某人或某事”(監視,2019 年)。這種連續觀察并不總是需要在被監視者的知識或同意的情況下進行,因為我們可以使用電子監視方法,允許“通過秘密使用電子設備進行監視或收集信息,例如在犯罪偵查或間諜活動中”(監視,2019)
.在C-UAS領域進一步推進這一想法,人們不僅要考慮在廣闊的天空中找到物體,還要考慮不僅要為飛行器,還要為地面上的操作員或基站提供檢測、分類、識別和調度對策的能力。檢測意味著該技術可以在給定區域發現UAS。UAS的分類通常能夠將UAS(無人機)與其他類型的物體(例如有人駕駛飛機)分開。
“更進一步的是識別。一些設備可以識別特定型號的無人機,甚至可以識別無人機或控制器的數字指紋,例如MAC地址。這種級別的識別對于(跟蹤和)起訴目的非常方便。被提醒有無人機存在...已經很有用了。但是,如果您知道無人機(和/或控制器)的確切位置,您的態勢感知和部署對策的能力將大大提高。一些設備甚至可以讓你實時跟蹤無人機的位置“(9種反無人機技術來檢測和阻止無人機,2019年)。
威脅識別:如何以及為什么
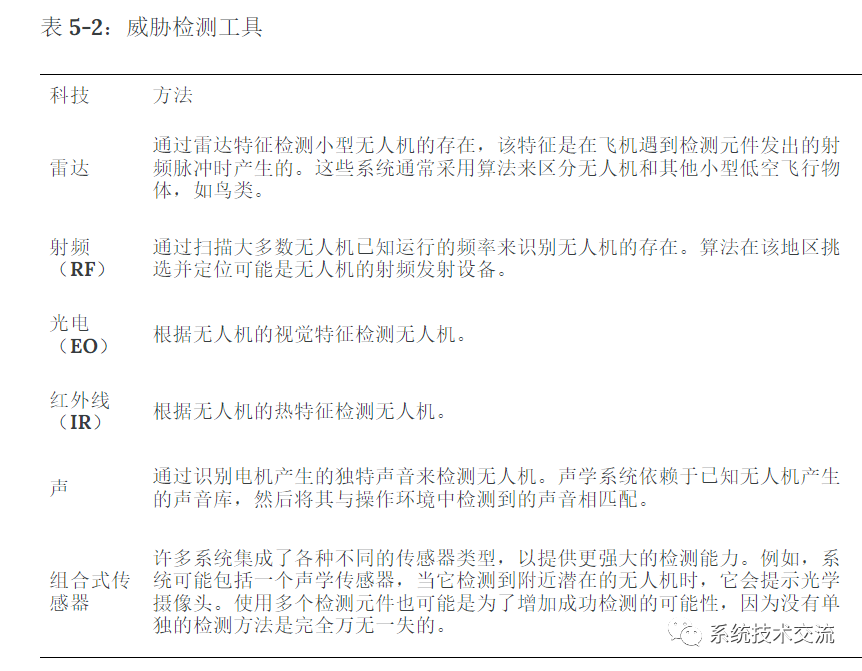
在天空中尋找人造物體的傳統方法是雷達信號、熱信號、用人眼視覺觀察物體或通過光學輔助機制。還有聲學特征以及一系列用于檢測的電子信號掃描技術,因為“C-UAS系統可以是地面或空中的,甚至是手持式的。當今市場上的大多數系統僅用于探測或攔截,而且絕大多數都是基于地面的,盡管少數由空中和地面組件組成“(Wilson,2018)。表5 -1列出了UAS探測和跟蹤的主要技術。
在天空中尋找物體的能力是所選機制以及物體的大小、速度、軌跡、天氣條件和可能的隱身能力的組合,以避免被發現。C-UAS領域的監視和偵察
包括雷達、射頻 (RF)、光電 (EO)、紅外 (IR)、聲學和組合傳感器。沒有完美的檢測方法。許多經濟實惠的光電傳感器僅限于日光操作和與目標的直接視線(對于紅外和許多射頻系統也是如此)。射頻和聲學傳感器使用已知聲音和頻率庫來檢測無人機,但新平臺的快速發展使得這些平臺不可能完全更新。傳感器靈敏度也是一個問題;太敏感會產生許多誤報,而降低靈敏度會導致假陰性(Wilson,2018)。
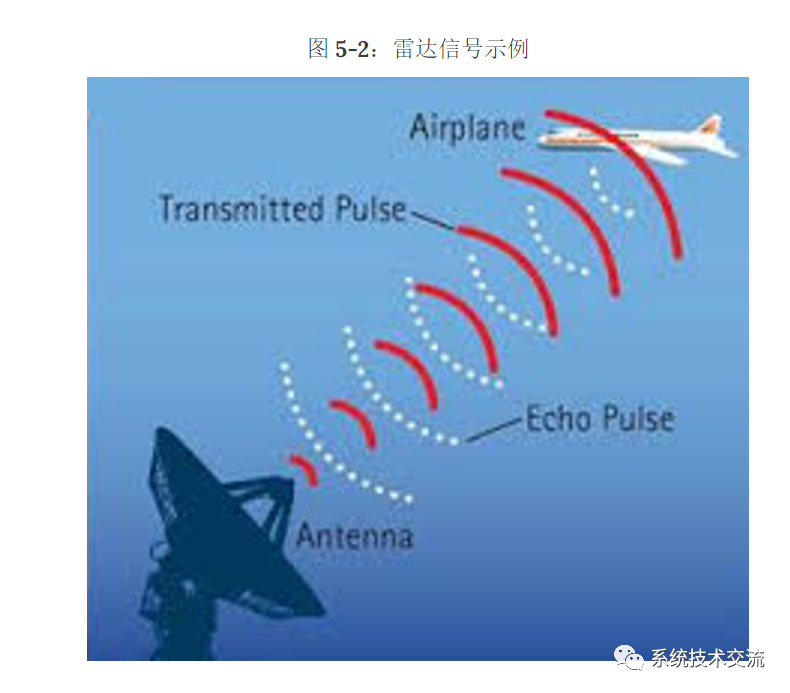
除此之外,還有溫度、天氣條件和物體位置的大氣效應,無論是在開闊的沙漠、浩瀚的海洋上,還是在城市或城市地形內的許多建筑物和信號中混合。跟蹤天空中的物體比在陸地上跟蹤物體更困難,因為天空的浩瀚造成了三維環境的困難,在這種環境中,物體可以向上、向下、橫向左右移動或所有三個維度的組合,因為個人和傳感器試圖找到和跟蹤物體。查找和跟蹤飛機的最常見方法是使用雷達。雷達是無線電探測和測距的首字母縮寫。雷達工作原理的簡單解釋是:
一束能量,稱為無線電波,從天線發射。當它們撞擊大氣中的物體時,能量會向各個方向散射,一些能量直接反射回雷達。物體越大,返回雷達的能量就越大。此外,能量束傳輸并返回雷達所需的時間也與到該物體的距離有關。(雷達的工作原理,2019)
雷達信號具有脈沖寬度(脈沖持續時間),可以增加或減少該寬度以“看到”更遠的物體或獲得相關物體的更好圖像。“脈沖寬度決定了雷達的空間分辨率......減小脈沖寬度會增加信號帶寬。對于給定的功率,更寬的系統帶寬會導致更高的接收器噪聲,從而降低靈敏度“(大英百科全書,2019 年)。當我們處理飛機的時間和空間位置時,“多普勒雷達系統可以通過測量發射脈沖和接收回波之間的相位偏移(或變化)來提供有關目標運動及其位置的信息,計算目標直接朝向或遠離雷達的運動”(雷達如何工作。2019).
影響給定雷達系統性能的幾個因素,這些因素包括
(1)它可以看到指定大小的目標的最大范圍,(2)它在范圍和角度上測量目標位置的準確性,(3)它區分一個目標和另一個目標的能力,(4)當它被大雜波回波掩蓋時檢測所需目標回波的能力,來自其他“友好”發射器的無意干擾信號, 或來自敵方干擾的故意輻射(如果是軍用雷達),(5)識別目標類型的能力,以及(6)其可用性(在需要時操作的能力),可靠性和可維護性(大英百科全書,2019)。
當嘗試使用雷達查找和跟蹤UAS時,這些因素和許多其他因素會產生問題,因為“來自陸地,海洋,雨,雪,冰雹,鳥類的回聲......但對于那些想要探測飛機、船只、導彈或其他類似目標的人來說,它們是一種滋擾。雜波回波會嚴重限制雷達系統的能力......(我們必須)在不減少所需目標的回聲的情況下盡量減少雜亂的影響“(大英百科全書,2019 年)
UAS往往體積小,電磁特征低,大多數傳統探測措施(如機場雷達系統)都可能錯過這一點;然而,微型多普勒雷達“能夠檢測移動物體內的運動 - 特別是速度差異。無人機往往具有螺旋槳,可以產生很大的速度差異。螺旋槳的一部分正在向你移動,一部分正在遠離(9 種反無人機技術,用于檢測和阻止無人機,2019 年)。這種微多普勒技術可以識別無人機,甚至可以區分無人機和鳥類。UAS也可以通過使用毫米波范圍來檢測,因為該范圍“非常適合直接環境中的監視任務,特別是在能見度差的情況下。與光學和紅外光譜相比,毫米波在霧、煙或灰塵存在下具有良好的穿透特性。(卡里斯,2019)
射頻 (RF)
射頻 (RF) 傳感器可以檢測 UAS 以及發送和接收控制信號或有效載荷開發信號的操作員或地面站位置。商用無人機通常通過無線電控制信號操作,并且通常具有用于實時傳感器下載的機載數據鏈路發射器(通常在2.4 GHz ISM頻段)。可以檢測和定位這些上傳和下載的頻率信號(無人機檢測,2019)。射頻傳感器是無源的,不需要法律授權即可使用,因此它們不會發出可能導致給定區域中其他信號發射器出現問題的信號。射頻傳感器是C-UAS的第一道防線之一,因為它們可以“檢測商業,消費者和DIY或原型無人機,飛行路徑和無人機的位置。射頻傳感器能夠根據無人機運行的協議或頻率識別無人機的類型和型號“(Friedberg,2019)。
光電 (EO) 傳感器-全動態攝像機
全動態視頻或數字增強攝像機可以“提供無人機的重要視覺確認,幫助識別有效載荷,并記錄無人機入侵的法醫證據。這種傳感器對于需要人工驗證或安全團隊需要入侵的視覺證據時非常重要“(Friedberg,2019)。
視頻和攝像頭傳感器查找UAS的能力有限,通常需要通過其他傳感器提示UAS。由于天氣條件、低能見度環境、視線、范圍、煙霧環境和夜間操作的限制,C-UAS 系統中的攝像機受到限制。EO傳感器通常與紅外傳感器(IR)設備結合使用,并作為一個單元作為EO / IR傳感器出售。
紅外傳感器 (IR)
紅外傳感器基于“所有物體都發射紅外能量,稱為熱信號”的科學。紅外熱像儀(熱像儀)檢測并測量物體的紅外能量。相機將該紅外數據轉換為電子圖像,顯示被測物體的表觀表面溫度“(熱成像基礎,2016)。
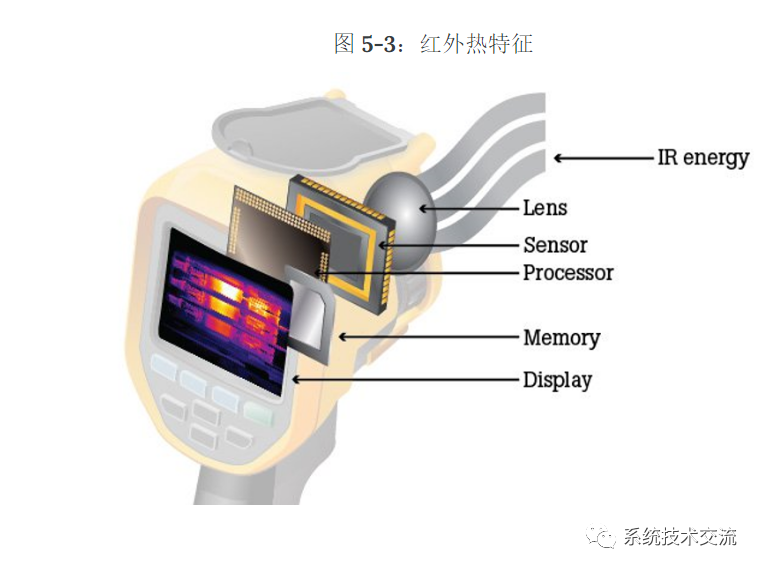
這種溫差為傳感器提供了監視天空中飛機的能力,因為“相機處理器從每個像素獲取信號并對其應用數學計算以創建物體表觀溫度的彩色圖(熱成像基礎,2016)。
用于C-UAS的聲學傳感器
聲學傳感器背后的概念是基于這樣一種想法,即不同飛機產生的獨特聲音可以識別并與給定區域內的所有其他聲音區分開來,因為“聲學傳感器使用已知聲音和頻率庫來檢測無人機,但新平臺的快速發展使得這些平臺不可能完全更新。傳感器靈敏度也是一個問題;過于敏感會產生許多誤報“(反無人機技術的新世界)。
這是一片大天空——我們如何從無人機上辨別雜亂?
跟蹤空中物體的另一個問題是天空中的一個或多個物體相互接觸或碰撞;然而,這是罕見的,被稱為大天空理論。大天空理論指出:“兩個隨機飛行的物體不太可能發生碰撞,因為三維空間相對于天體是如此之大。一些涉及測高和導航標準的航空安全規則就是基于這個概念“(Big Sky Theory,2019)。
隨著“雷達的出現”,兩架飛機可以被“看到”并避開彼此的飛行路徑。交通防撞系統(TCAS)設備的出現使裝備的飛機能夠解決沖突。現在我們擁有允許兩架飛機進行太空定位的技術“(Big Sky Theory,2019)。
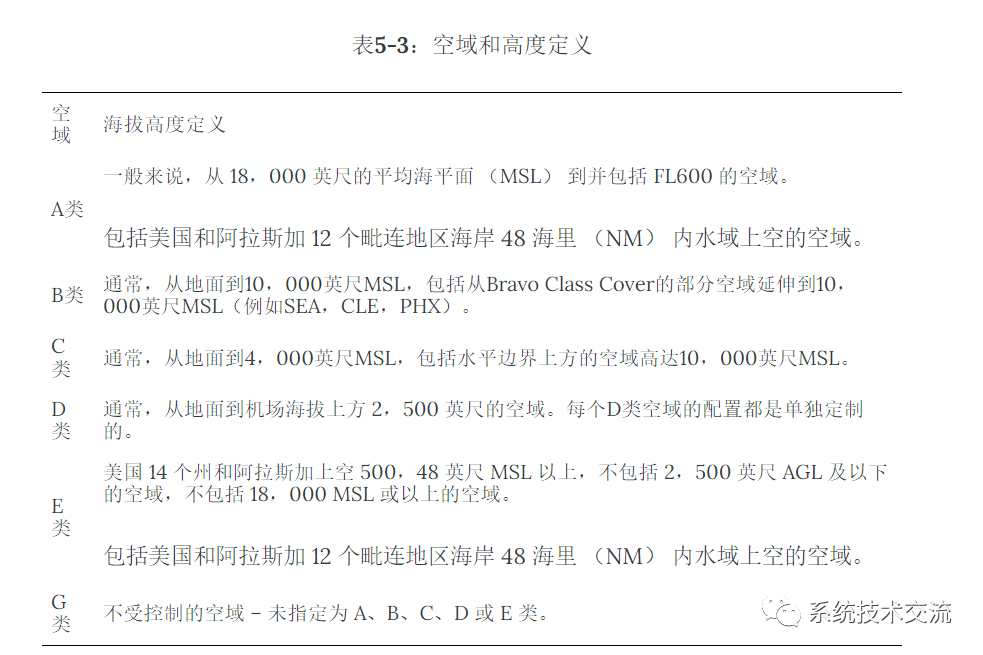
控制大天空理論的技術之一是分配不同類型的空域規則來控制某些時間和空間區域。這種空域的使用允許將不同的規則分配給不同的環境。例如,如果有人駕駛或無人駕駛的飛機不遵守商定的規則,則被認為是危險的。根據車輛在哪個空域運行以及車輛未遵循商定規則的程度,采用預定響應。
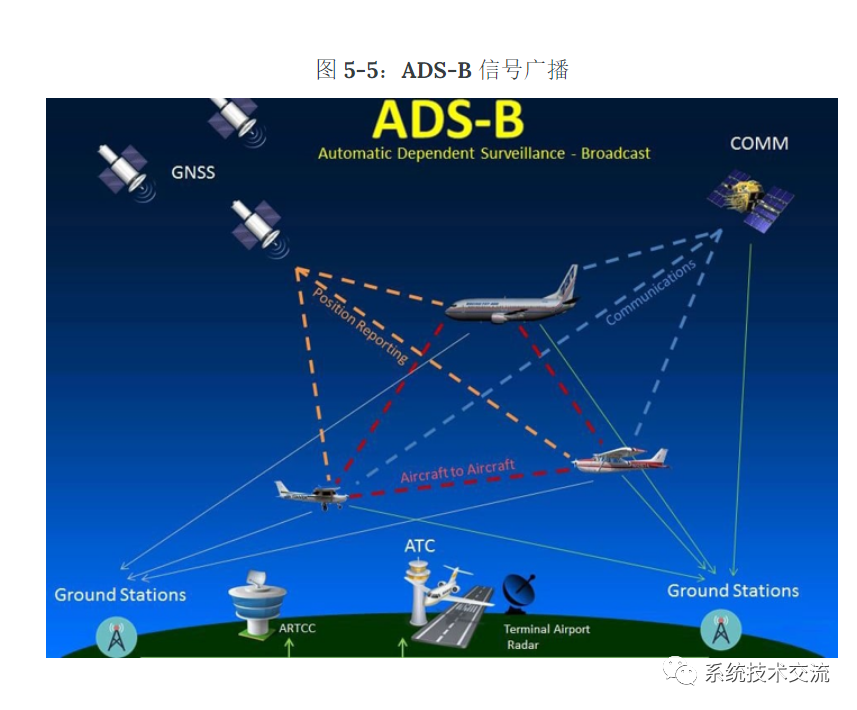
圖5-4描述了每個空域走廊內的不同類型的空域和控制。根據飛行器在哪個空域走廊中運行,一系列積極的控制措施已經到位,包括雷達跟蹤,模式“C”高度編碼器(允許為區域內的每架飛機分配唯一的代碼),操作員的自我報告,視覺指示器和無線電呼號。這一概念在有人駕駛飛機領域運作良好,因為受控空域中的所有飛機都必須配備高度編碼器,“到目前為止,這意味著在歐洲和北美之間移動的飛機不得不在天空中使用有條理的軌道。剛性結構在飛機周圍保持了大面積的凈空間,以消除碰撞的可能性“(Amos,2019)。隨著無人駕駛和可選載人技術在世界各地的擴散,這一概念現在必須變得更加靈活。隨著自動相關監視廣播(ADS-B)轉發器的發明,該系統正在緩慢發展。這些應答器從特定飛機推送信息,包括其身份、GPS 確定的高度和地速。引入ADS-B是為了加強對陸地的監視和安全,但衛星也可以接收到這些信息(Amos,2019)。

廣播自動相關監視(ADS-B)-幫助消除C-UAS監視和偵察挑戰中的“好人”
自動相關監視廣播(ADS-B)的引入將有助于改變有人駕駛飛機的監視和偵察,但這項新技術如何適應無人領域并可能協助C-UAS仍在確定中。美國公司Aireon表示,“其新的衛星監視網絡現已全面上線,并在北大西洋進行試驗。該系統采用一個由66個航天器組成的星座,監測飛機轉發器發出的情境信息。它們每八秒報告一次飛機的位置、高度、方向和速度。他們現在擁有的關于飛機行為的更詳細的信息意味著可以引入更有效的路線“(Amos,2019)。
ADS-B是一個系統系統,并“搭載在銥星衛星電話服務提供商的所有66個航天器上”。這些傳感器現在可以在雷達能見度之外跟蹤海洋上的飛機——海水覆蓋了全球 70%的面積“(Amos,2019 年)。如果我們知道有人駕駛的“友軍”飛機在時間和空間中的位置,這可能有助于監視和偵察潛在有害的無人機,并允許跟蹤和消除這種威脅。圖5-5顯示了ADS-B在未來幾個月內的運行方式,因為FAA(聯邦航空管理局)要求所有飛機在1年2020月100日之前都必須遵守。這包括在 A、B 或 C 類空域運營的任何飛機。此外,任何在E類空域(高于FL2 MSL但不低于500,2019英尺AGL)運行的飛機也必須遵守。
隨著ADS-B技術提供近乎實時的衛星監視,“為空域管理引入更大的靈活性(成為可能)的能力。例如,在北大西洋,傳統的直列安全分離距離最終將從40海里(80公里)減少到14海里(25公里)“(Amos,2019)。這種靈活性為航空業提供了巨大的希望;然而,這也使C-UAS復雜化,因為飛機不再處于已知的,可預測的飛行路徑上。試圖要求所有UAS都采用ADS-B轉發器可能被證明是困難的,因為該技術可能花費數千美元,并且集成到當前的UAS設計中可能不會完全成功。
在C-UAS空間中區分無害飛機和威脅飛機的困難
您如何確定在該地區飛行的是什么 - 是鳥,小型飛機,無人機,是否構成威脅?標準機場雷達不能很好地查找和跟蹤大多數UAS。造成這種情況有幾個原因,包括飛機的尺寸、材料以及大多數第 1 組和第 2 組重量等級普遍缺乏熱特征。
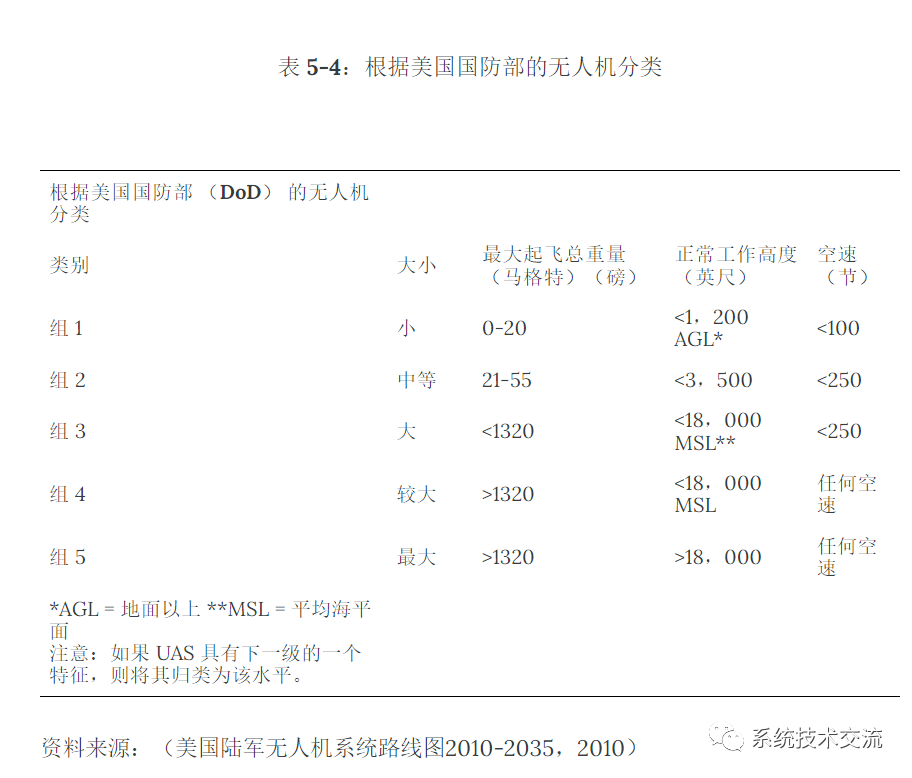
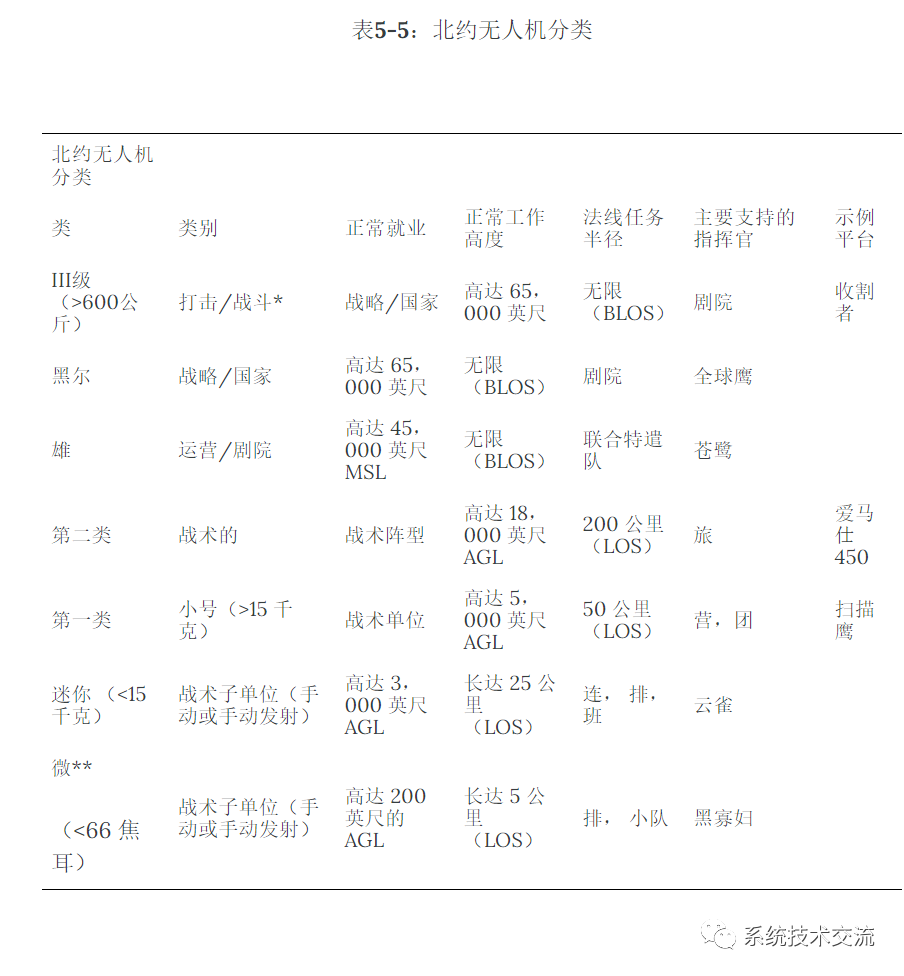
使區分有人駕駛和無人系統的問題復雜化的是用于討論飛機的不同尺寸、重量和任務等級的大量本體和分類法,如表5-3和5-4所示。大多數無人駕駛航空器模糊了民用和軍用(兩用技術)之間的界限,這一事實使這些問題更加復雜。Coheive同意UAS的分類,有人駕駛飛機是一個世界性問題。當人類在確定UAS是否有惡意意圖或僅僅是在給定空域飛行的無辜飛機時,必須做出生死判斷時,驗證飛機是否有人駕駛,絕對無人駕駛或可選有人駕駛時,存在真正的挑戰。
機場雷達通常探測到小到直升機和單引擎陸地飛機的飛機,以及大到大型噴氣式飛機的飛機,然而,所有這些飛機通常都是由金屬制成的,具有可識別的熱特征,以及可以傳達位置和意圖的飛行員。UAS往往沒有這些屬性。此外,大多數UAS由塑料,輕木,復合材料或所有這些材料的組合制成,金屬的使用量往往比任何其他材料都少。第 1 組和第 2 組 UAS 往往是電池供電的,因此不提供可識別或可追蹤的熱源。使用可燃燃料發動機的UAS仍然沒有足夠的熱信號或雷達返回信號,使監視和偵察成為一項容易的任務。
這些復合材料制造的UAS不像金屬等密度較大的材料那樣反射雷達能量。無人機可以通過使用由雷達吸收材料(RAM)制成的復合材料來進一步減少任何能量,或者使用增強塑料或其他獨特的非傳統材料將雷達吸收結構(RAS)構造到上層建筑中。大多數UAS足夠小,找到雷達信號非常困難;然而,現在有“大量可以減少雷達信號的泡沫和涂料現在構成了微波材料市場的一個高度活躍的部門”(Marsh,2010)。
復合材料的使用在UAS中并不罕見,因為增強塑料材料以其重量輕,高強度,剛度和抗疲勞性的獨特組合而聞名,但它們的電磁(EM)特性也很重要;例如,基于玻璃纖維增強塑料(GRP)的印刷電路板和用于敏感電子設備的碳復合電磁干擾(EMI)屏蔽外殼。低重量RAS可以由玻璃和碳纖維復合晶格制成,其中空隙被微波吸收泡沫占據。吸收有效性將與網格單元結構的體積分數和元素之間的距離有關(Marsh,2010)。
新挑戰需要新思維組合傳感器
最成功的C-UAS計劃采用多傳感器方法,以確保準確識別UAS作為
僅依靠一種檢測方法;無人機可能會被錯過。例如,當使用常規雷達時,可能很難檢測到低空飛行的無人機或將無人機與鳥類區分開來。或者,如果無人機被建筑物或樹木遮擋,光學傳感器將難以拾取它。通過頻譜監控增強雷達和光學傳感器,安全團隊(將)更清楚地了解任何潛在的無人機活動(無人機檢測,2019)。
這里介紹的討論是尋找和跟蹤UAS的技術挑戰的樣本。識別特定UAS類型,飛機所有者,UAS通常用于什么(正常有效載荷)和飛機操作員的任務成為更大的挑戰,因為“C-UAS系統使用來自多個傳感器的組合數據,還必須能夠區分合法和敵對,盟國和敵方UAS - 這是任何已知系統都無法做到的。這是人類操作員必須進行干預以做出通常是瞬間評估的地方“(Wilson,2018)。
自美國聯邦航空局成立初期以來,該機構就規定有人駕駛飛機必須注冊并分配一個尾號,該尾號必須永久顯示在飛機上。有關有人駕駛飛機的信息很容易在世界各地的數據庫中找到。作為一種發展速度超過政策、法律和治理速度的新技術,沒有全面的數據庫可以提供簡單的 UAS 識別查找,即使有這樣的數據庫,注冊 UAS 的不同法律(以及有限的合規性)將使大多數信息不完整和無法使用。新的UAS正在快速發展,隨著UAS接管許多傳統的有人駕駛飛機任務,它們的任務遠遠超出了曾經正常的相機傳感器工作。波音公司的飛機加油無人機說明了這一點,這是一種“旨在為美國海軍戰斗機在半空中加油的先進無人駕駛飛機,以T1的名義飛上天空,原型MQ-25在中美洲圣路易斯機場進行了兩個小時的自主飛行”(Lavars,2019)。美國聯邦航空局仍在繼續與這些問題作斗爭。2019年<>月,許多美國立法者致函交通部長,稱
“我們寫信是為了表達我們對聯邦航空管理局(FAA)要求無人機系統(UAS)遠程識別的規則持續延遲的持續關注,并敦促您投入必要的人員和資源,以快速發布關于這個問題的擬議規則制定通知(NPRM)......未能完成遠程識別對空域構成“嚴重風險”,也“扼殺了無人機行業的創新”。造成這種情況的原因有很多——技術并不簡單,有多種方法和討論哪個是最好的,以及許多利益相關者在混合中“(McNabb,2019)。
本章的這一部分提供了正在探索的新技術、戰術、技巧和政策,以幫助解決C-UAS監視和偵察任務領域的困難。最初設計用于保護軍事設施的技術正在為C-UAS任務進行修改。掃描監視雷達系統(SSRS)就是一個例子,“非常適合近距離探測和精確定位兩類(微型和微型UAS)的幾架無人機。此外,SSRS 系統可在 50 至 150 米的測量范圍內為多達四個 UAS 提供實時跟蹤“(Caris,2019 年)。該技術對較小的UAS有效;必須使用額外的組合傳感器技術來創建完整的C-UAS保護范圍。
存在許多C-UAS目錄;但是,大量信息未經正確審查,或者更多的是廣告格式而不是信息格式。www.unmannedairspace.info 的計數器UAS目錄是更全面的列表之一。最新版本在一份83頁的文檔中討論了54項技術。該目錄對公眾免費,并且往往只經過可驗證的信息進行審查,列出“可用的反UAS系統,網絡和組件,并免費提供......信息由供應商直接提供,并編輯數據以刪除無法驗證的聲明“(FAA,2019)。
事實證明,在C-UAS領域困難的問題之一是不僅試圖找到和跟蹤車輛;它試圖找到車輛被控制的位置以及誰在控制車輛。正在開發新技術來解決這個問題,因為“CACI的SkyTracker技術套件是一種反小型無人機系統(C-sUAS)功能,由不同的外形尺寸組成,旨在利用小型無人機系統(sUAS)與其控制器之間的無線電通信”(CACI,2019)。
SkyTracker具有三種不同的外形尺寸,具體取決于C-UAS要求;它們包括:
杜邦可麗耐系統提供固定設施保護,防止無人機系統(UAS)對作戰人員和關鍵基礎設施的威脅。可麗耐使用精確中和技術檢測、識別、跟蹤和緩解sUAS威脅,以確保對周圍射頻(RF)頻譜和現有通信幾乎沒有附帶損害。
AWAIR系統提供針對敵方sUAS的移動部隊或設施保護。加固型移動平臺利用可麗耐軟件基線來精確檢測、識別和緩解sUAS威脅。該系統可以輕松部署在車輛或船舶上,提供地面和海上護航保護。
CACI的便攜式先進攻擊系統可以擊敗小型復雜的UAS。該系統調查環境,使部署的單元能夠對抗sUAS和模擬視頻信號。該系統可以自主運行,以提供精確的分布式攻擊,并在敵對環境中提供快速,響應的部隊保護能力(CACI,2019)。
一家名為SRC的美國應用研究非營利性公司“正在應用其在電子戰,空中監視以及目標檢測,跟蹤和分類算法方面的廣泛背景,以幫助檢測,跟蹤和防御低,慢和小型無人機系統(UAS)威脅”(Counter-UAS Systems,2016)。
SRC利用這些知識,為軍事和民用市場創造了C-UAS技術。
無聲弓箭手反無人機技術可檢測、跟蹤、識別和擊敗敵方無人機。該技術包括經過驗證的雷達和電子戰系統、用于視覺識別目標的攝像頭以及為作戰人員提供高級態勢感知的 3D 用戶顯示器。
小型、緩慢、低空飛行的無人機很容易通過當前的安全措施,對人員和財產構成未被發現的威脅。SRC的Gryphon Skylight無人機安全解決方案依靠雷達和頻譜傳感來檢測和識別UAS,商用飛機,甚至鳥類,讓您清楚地了解您的安全空域(Counter-UAS Systems,2016)。
任務規劃保密 – 保護數據
保護數據的第一個問題是,數據是否被其他人看到重要嗎?這似乎與這次對話背道而馳;但是,加密數據會帶來大多數C-UAS方案中可能不需要的成本。監視和偵察的藝術往往是在陰影中完成的。在C-UAS領域,允許所有可以訪問的人都知道信息可能更有利,允許額外的信息輸入和對主題飛機的更多“眼睛”。現在,對主題飛機的反應是另一回事,因為個別公司和政府可能不想透露所使用的確切方法以及這些方法對主題飛機的影響。諸如聲學特征之類的信息對于屏蔽很重要,并且不會因為今天的傳感器而公開
一系列跟蹤和數據收集功能以及可視化,包括帶有目標方位的預警警報、多個同時進行的威脅檢測和跟蹤以及目標的 3D 跟蹤。該系統可以配置多個聯網傳感器,以支持從遠程現場操作到擁擠的城市環境的廣泛覆蓋范圍。捕獲的數據可以集成到現有的指揮和控制軟件程序中,以支持情報、監視和偵察、作戰和決策支持應用(通用原子公司向美國陸軍展示了聲學無人機探測器,2019 年)。
大多數UAS平臺的性質是廉價且公開可用的組件,但這些組件通常是:
在沒有內置網絡保護標準的情況下獨立構建,使系統容易受到攻擊,并且“即插即用”的本質往往會在網絡保護中造成不兼容,幾乎沒有真正的數據標準。
對具有多個旋翼的幾種流行無人機型號的配置和飛行控制器/微處理器的分析揭示了與遙測鏈路通過串行端口連接(其中可以捕獲、修改或注入信息)與無人機之間傳輸數據以及無人機與其地面站接口的連接(其數據鏈路可能被欺騙, 使黑客能夠完全控制車輛)。(尼科爾斯和 et.al,2019)
傳感器數據安全和網絡域內的攻擊威脅必須成為任務規劃各個方面的一部分。任務規劃將需要在目標區域訪問、傳感器能力和可用性、信息時間優勢和網絡/數據安全要求之間進行權衡。
用于周界保護的C-UAS任務規劃
既然已經討論了C-UAS組合的基礎,那么這些傳感器系統的放置和互連對于UAS的三角測量是必需的。如圖5-8所示,傳感器的互鎖性質和重疊將創建UAS目標的三角測量。

在保護特定設施的周邊時,必須進行深入分析,以了解在開始監視和恢復該地區之前獲得所需安全級別的能力。一旦該地區的偵察完成,就可以對任何未經授權的無人機進行監視,并將以數字方式記錄下來,并對違規的無人機采取適當的對策。
組合正確的傳感器(前面討論過)將取決于許多因素,包括:
地形(視線)
該地區建筑物和人造物體的數量和高度
保護級別 - 提供 24/7 全天候(或僅在占用時間)的操作
頻率噪聲水平-電磁干擾
該地區/國家的適用法律
威脅級別 - 區域關鍵基礎設施或保護家族企業是否存在已知威脅
最有可能的威脅類型(帶EO / IR傳感器的四旋翼或固定翼自殺無人機)
對威脅的可能反應是什么?組合傳感器系統如何驗證威脅已被消除或已離開該區域并且不再是威脅?
C-UAS的預算是多少?這筆預算中有多少可以分配給監視和偵察?
傳感器能否覆蓋隱藏區域或口袋而不重疊覆蓋?
這些因素中的每一個都會影響放置的傳感器的類型和數量,以及這些傳感器在正常時間內或在C-UAS威脅事件以及威脅降級和中和階段如何報告、存儲信息和利用。此外,隨著UAS市場的不斷發展,以及威脅行為者的策略和技術變得更加復雜,應考慮技術更新計劃。必須更新C-UAS周界保護的規劃,以應對新的威脅。
結論
在C-UAS的背景下回顧監視和偵察之間的區別,可以區分傳感器俯視目標的典型思維過程與試圖在廣闊的天空找到UAS目標的困難現實。跟蹤有人駕駛飛機的傳感器通常不擅長尋找和跟蹤UAS,因為其尺寸,材料,熱信號和整體UAS雷達剖面與有人駕駛飛機有很大不同。辨別這種差異、對其進行編目并保持數據庫信息準確性的能力對于避免因有人駕駛飛機與敵方無人機的意外錯誤描述而造成生命損失至關重要。ADS-B的引入將有助于識別受控空域中的有人駕駛飛機。轉發器還將使確定該空域中具有威脅性的UAS的任務更容易檢測和緩解。需要在這個領域使用多個傳感器套件和持續創新,才能在這個不斷變化和不斷增長的UAS領域進行監視和偵察。無人機系統的整體識別機制,無論是行政還是技術,都是通過全球航空當局制定或調整政策、法律和治理來發展的問題。所有航空當局能夠就無人機系統的識別機制、本體和分類法以及國家和國際合作協議達成一致,這為對航空界的安全產生積極影響提供了機會。
-
飛行器
+關注
關注
13文章
729瀏覽量
45808 -
無人機
+關注
關注
230文章
10588瀏覽量
183598 -
偵察系統
+關注
關注
0文章
4瀏覽量
1638
原文標題:C-UAS(反無人機系統)的監視和偵察系統技術介紹
文章出處:【微信號:CloudBrain-TT,微信公眾號:云腦智庫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論