

1 基本概念
1.1 uboot 是什么?
當(dāng)我們厭倦了裸機(jī)程序,而想要采用操作系統(tǒng)的時候,uboot就是不得不引入的一段程序。所以,uboot就是一段引導(dǎo)程序,在加載系統(tǒng)內(nèi)核之前,完成硬件初始化,內(nèi)存映射,為后續(xù)內(nèi)核的引導(dǎo)提供一個良好的環(huán)境。uboot是bootloader的一種,全稱為universal boot loader。
1.2 存儲器
在了解 Uboot 之前,我們先來了解一下代碼的載體,看看代碼到底存儲在什么地方!
1. norflash/nandflash、SRAM 和 SDRAM 作為存儲器有何異同?
1. norflash - 是非易失性存儲器(也就是掉電保存)
NOR flash 帶有 SRAM 接口,有足夠的的地址引腳進(jìn)行尋址,可以很容易地讀取其內(nèi)部的每一個字節(jié)。
注意是Read!因?yàn)?flash 不是任意寫入,而是遵循disable write protect -> erase -> write。這是 flash 的特性決定的,其電路只能從1->0,而不能0->1翻轉(zhuǎn)。
擦除過程就是將 flash 中的某一個扇區(qū)恢復(fù)為0xFFFFFFFF,然后再寫入數(shù)據(jù)。另外,代碼指令可以直接在 norflash 上運(yùn)行。
(重要!!!上電后可以讀取 norflash 中的數(shù)據(jù)但是不可以進(jìn)行寫操作) 2. nandflash - 是非易失性存儲器(也就是掉電保存)
它也是非易失閃存(掉電不丟失)的一種,但是它雖然有數(shù)據(jù)總線,但是沒有地址總線,所以 cpu 不能直接從 nandflash 中取指運(yùn)行,由于它價格便宜,所以常常用來存儲大量數(shù)據(jù),和我們常說的硬盤類似。
3. SRAM - 靜態(tài)隨機(jī)訪問存儲器 - Static Random Access Memory
static是指只要不掉電,存儲在 SRAM 中的數(shù)據(jù)就不會丟失。這一點(diǎn)與 DRAM 不同,DRAM 需要進(jìn)行周期性刷新操作。然而,我們不應(yīng)將SRAM 和只讀存儲器(ROM)、Flash Memory 相混淆,因?yàn)?SRAM 是一種易失性存儲器,它只有在電源保持連續(xù)供應(yīng)的情況下才能夠保持?jǐn)?shù)據(jù)。
Random Access指的是存儲器的內(nèi)容可以任意順序進(jìn)行訪問,而不管前一次訪問的是哪一個位置。(重要!!!上電后就可以讀寫 SRAM 中的數(shù)據(jù),而無需初始化操作)
4. SDRAM - 同步動態(tài)隨機(jī)存取存儲器 - Synchronous Dynamic Random Access Memory
需要不斷的刷新,才能保存數(shù)據(jù)。而且是行列地址復(fù)用,許多都有頁模式。
(重要!!!需要對 DDR 控制器進(jìn)行初始化 <配置寄存器>,才能去讀寫 SDRAM 中的數(shù)據(jù))
(1)NOR Flash - 程序存儲器
作為 ARM 處理器的程序存儲器。因?yàn)槲覀儽仨殞⒊绦虮4嬖谝粋€掉電后還能保存數(shù)據(jù)的地方。上電后,NOR Flash 就相當(dāng)于一個隨機(jī)讀取的只讀存儲器。
那么,既然 NOR Flash 可以運(yùn)行程序,我們?yōu)槭裁床恢苯釉谄渖线\(yùn)行程序呢?
一般情況下,我們編譯的程序中,.text段,.rodata段都是只讀的,這沒有問題。但是,.data段(數(shù)據(jù)段)和.bss(未初始化的全局變量和靜態(tài)變量)在程序的運(yùn)行過程中變量的值是需要改變的(改變一個變量的值,需要改變對應(yīng)物理地址上
存儲的內(nèi)容),很可惜,NOR Flash 只能直接讀取,而無法進(jìn)行寫操作。
那么,為了解決這個問題,就需要 SRAM 了。
(2)SRAM - 提供運(yùn)行環(huán)境
其重要特性就是:容量小,512KB;運(yùn)行程序速度快;價格貴。
可以作為程序運(yùn)行時的堆棧空間。把 ARM 處理器的堆棧指針 sp 設(shè)置在 SRAM 中,為程序提供運(yùn)行環(huán)境。
SRAM 作為運(yùn)行程序的場所是可以的,但是由于其昂貴的價格,極小的容量,而現(xiàn)在程序一般都非常龐大,所以滿足不了我們的需求。正因?yàn)榇耍琒DRAM 應(yīng)運(yùn)而生。
(3)SDRAM - 運(yùn)行程序
它的重要特性是容量大:512M;程序運(yùn)行速度快;價格便宜。
但是其掉電易失數(shù)據(jù),上電后必須初始化 DDR 控制器,否則無法進(jìn)行數(shù)據(jù)的讀寫。所以在運(yùn)行系統(tǒng)內(nèi)核之前必須對其進(jìn)行初始化,這就是在 NOR Flash 和 SRAM 上搭建的程序的作用。
那它主要都完成什么工作呢?
1.完成對處理器時鐘的初始化
2. DDR的初始化
3. 給 gd_t *gd_ptr 賦值(用于存儲uboot鏡像的長度,重定位地址,
重定位偏移量等信息)
在 uboot 搬運(yùn)到 DDR 中運(yùn)行前進(jìn)行最小系統(tǒng)的初始化,之后就將 uboot 搬運(yùn)到 DDR 中運(yùn)行。那么,此時 NOR Flash 和 SRAM 的任務(wù)就完成了(也就是沒有用了)。
總結(jié):
從 norflash 啟動可以省事多了,不僅如此,我們自己編寫的裸機(jī)程序需要調(diào)試,一般也是直接燒寫到 norflash 中進(jìn)行的,因?yàn)橹灰覀儗⒕幾g好的可執(zhí)行文件放到 norflash 的開始,開發(fā)板上電以后就會從 norflash 的第一條指令開始取指執(zhí)行,我們后面寫裸機(jī)程序的調(diào)試就是用這種方式進(jìn)行的。 從 norflash 啟動雖然從開發(fā)的角度會很方便(其實(shí)也方便不了多少),但是從產(chǎn)品的角度卻增加了它的成本,畢竟 norflash 還是相對較貴的,我們明明只要一塊 nandflash 就足夠啟動整個開發(fā)板了,就沒必要在產(chǎn)品中添加一塊 norflash 了,只要代碼改改就能省下不少成本,何樂不為。 而且 nandflash 對產(chǎn)品是必不可少的,因?yàn)楹竺孢€要存放內(nèi)核和文件系統(tǒng),起碼需要幾十兆的空間,用 norflash 來存儲也不現(xiàn)實(shí)。
也許你會想,能不能只用 norflash,不用 nandflash 和 SDRAM 行不行呢,畢竟 norflash 即可以存儲,也可以運(yùn)行程序的啊,從理論來說是可以的,但是了解一下他們的市場價格、運(yùn)行速度和工作原理,應(yīng)該就會知道答案了。
2 uboot 鏈接文件
前面我們已經(jīng)了解了嵌入式設(shè)備的存儲介質(zhì),以及它們的用途。但是,對于編譯后的代碼如何在內(nèi)存上分配,處理器是不知道,這需要我們?nèi)藶榈刂付ā_@時候,后綴為 lds 的鏈接文件出現(xiàn)了,它規(guī)定了編譯后的代碼各個段是如何分配的。理解了它,對于我們對 u-boot 也是大有幫助的。下面我們直接看代碼內(nèi)容,如果需要了解語法,請參考 2.3 鏈接文件語法。
2.1 u-boot.lds 文件分析
文件位置:u-boot/board/mini2440/u-boot.lds。
OUTPUT_FORMAT("elf32-littlearm","elf32-littlearm","elf32-littlearm")/*指定輸出可執(zhí)行文件是elf格式,32位ARM指令,小端*/
OUTPUT_ARCH(arm) /*指定輸出可執(zhí)行文件的platform為ARM*/
ENTRY(_start) /*指定輸出可執(zhí)行文件的起始地址為_start*/
SECTIONS
{
/* 指定可執(zhí)行文件(image)的全局入口點(diǎn),通常這個地址都放在ROM(flash)0x0位置。*/
/* 必須使編譯器知道這個地址,通常都是修改此處來完成 */
. = 0x00000000; /* 從0x0位置開始 */
. = ALIGN(4); /* 代碼以4字節(jié)對齊 */
.text :
{
cpu/arm920t/start.o (.text) /* 從start.S文件中的代碼開始 */
cpu/arm920t/s3c24x0/nand_read.o (.text) /* 關(guān)于nand讀取的代碼 */
*(.text) /* 其它代碼部分*/
}
. = ALIGN(4);
.rodata : { *(SORT_BY_ALIGNMENT(SORT_BY_NAME(.rodata*))) } /*指定只讀數(shù)據(jù)段*/
. = ALIGN(4);
.data : { *(.data) } /* 指定讀/寫數(shù)據(jù)段,RW段 */
. = ALIGN(4);
.got : { *(.got) } /*指定got段, got段是uboot自定義的一個段, 非標(biāo)準(zhǔn)段*/
. = .;
__u_boot_cmd_start = .; /*把__u_boot_cmd_start賦值為當(dāng)前位置, 即起始位置*/
.u_boot_cmd : { *(.u_boot_cmd) } /*指定u_boot_cmd段, uboot把所有的uboot命令放在該段.*/
__u_boot_cmd_end = .; /*把__u_boot_cmd_end賦值為當(dāng)前位置,即結(jié)束位置*/
. = ALIGN(4);
__bss_start = .; /*把__bss_start賦值為當(dāng)前位置,即bss段的開始位置*/
.bss (NOLOAD) : { *(.bss) . = ALIGN(4); } /*指定bss段,告訴加載器不要加載這個段*/
__bss_end = .; /*把_end賦值為當(dāng)前位置,即bss段的結(jié)束位置*/
}
通過上面的分析可以看出
由于在鏈接腳本中規(guī)定了文件 start.o(對應(yīng)于 start.S) 作為整個 uboot 的起始點(diǎn),因此啟動 uboot 時會執(zhí)行首先執(zhí)行 start.S。
一般來說,內(nèi)存空間可分為代碼段、數(shù)據(jù)段、全局變量段、未初始化變量區(qū)、棧區(qū)、堆區(qū)等. 其中,棧區(qū)由指針 SP 決定,堆區(qū)實(shí)質(zhì)上是由 C 代碼實(shí)現(xiàn)的,其它段則由編譯器決定. 從上面的分析可以看出,從 0x00000000 地址開始,編譯器首先將代碼段放在最開始的位置,然后是數(shù)據(jù)段,然后是 bss 段 (未初始化變量區(qū)).
2.2 System.map 文件
我們來看一下System.map這個文件:
33f80000 T _start 33f80020 t _undefined_instruction ......(中間省略) 33f80fd8 T start_armboot
如何設(shè)置從 0x33f80000 開始呢?~ 這是鏈接的時候指定的。在 u-boot 根目錄下面的 config.mk 中有下面一句
LDFLAGS += -Bstatic -T $(LDSCRIPT) -Ttext $(TEXT_BASE) $(PLATFORM_LDFLAGS)
其中的 - Ttext $(TEXT_BASE), 這句指明了代碼段的起始地址。而 TEXT_BASE 在 board/mini2440/config.mk 中定義 TEXT_BASE = 0x33F80000
為什么是 0x33F80000 呢?~
我們先來看一下 S3C2440 的內(nèi)存分布圖:
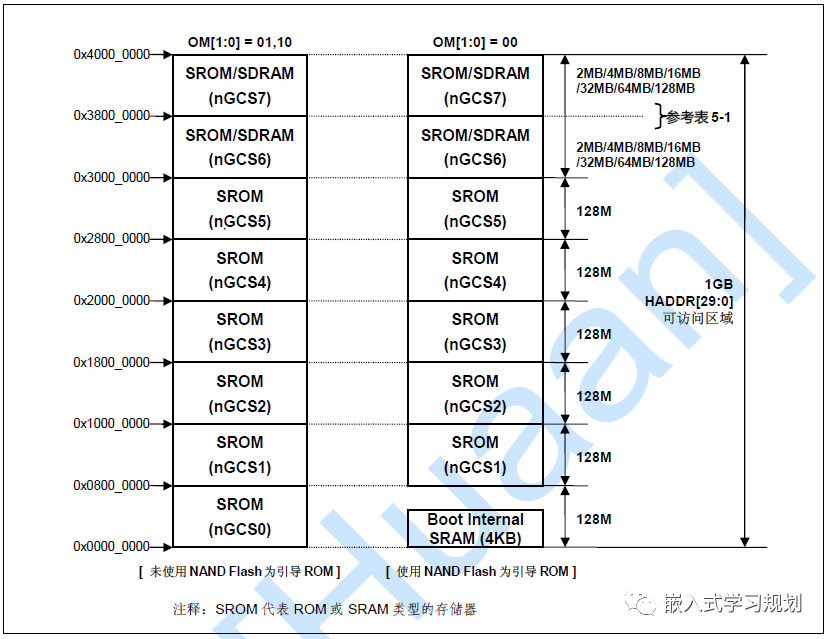
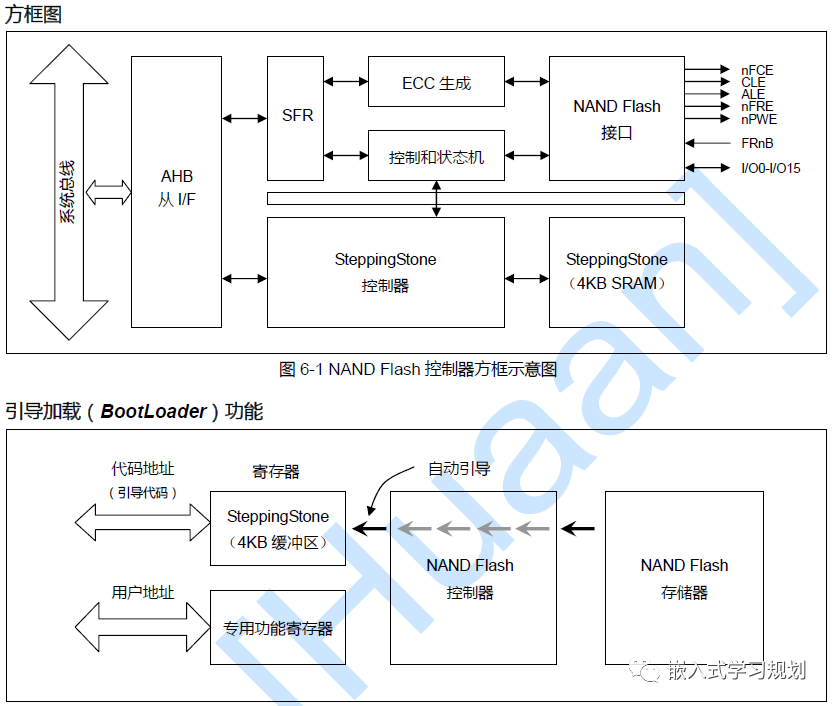
如上圖所示,如果選擇 NAND flash 為引導(dǎo) ROM 時,為了支持 NAND Flash 的 BootLoader,S3C2440A 配備了一個內(nèi)置的 SRAM 緩沖器,叫做 “Steppingstone”, 具體如下圖所示。引導(dǎo)啟動時,NAND Flash 存儲器的開始 4K 字節(jié)將被自動加載到 Steppingstone 中并且執(zhí)行自動加載到 Steppingstone 的引導(dǎo)代碼。
所以說,雖然我們在鏈接文件 u-boot.lds 中指定了起始地址是 0x00000000,但是在 config.mk 的編譯構(gòu)造文件中還指定了起始地址是 0x33f80000。
因?yàn)槲覀兊?u-boot 代碼在上面的 4k 代碼執(zhí)行完成后,還是要跳轉(zhuǎn)到 0x33f80000 處執(zhí)行的。所以,鏈接文件中的默認(rèn) 0x00000000 起始地址不需要起作用。
查看 S3C2440 的 datasheet,如下圖所示,
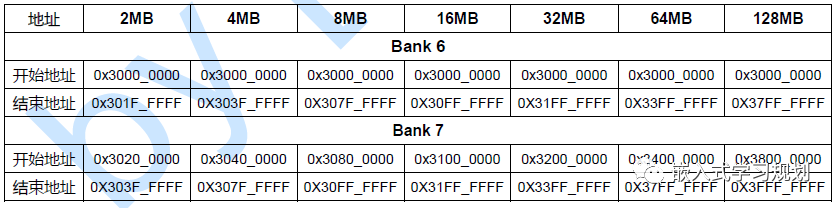
可以看出 64M 空間對應(yīng)的地址為 0x30000000~0x33FFFFFF。TEXT_BASE=0x33F80000 即為程序加載起始地址,可以使用的空間大小即為 0x33F80000 到 0x33FFFFFF 共 512K ,如果你 u-boot 包含的功能太多,覺得不夠用,你可以把 0x33F80000 調(diào)小一點(diǎn), 即和往低地址移一些,移的過程中注意內(nèi)存頁對齊就行了,一般是 4KB。
2.3 鏈接文件語法
下面是一些比較難懂的 lds 文件的語法,先記錄如下。對于常用語法可以自行查閱,網(wǎng)上資料還是蠻多的。
2.3.1 .got 語法
在了解這個語法之前,我們先來了解一些其他概念:
加載時重定位
基本思路是:在鏈接時,對所有絕對地址的引用不作重定位,而把這一步推遲到裝載時再完成。一旦模塊裝載地址確定,即目標(biāo)地址確定,那么系統(tǒng)就對程序中所有的絕對地址引用進(jìn)行重定位。
設(shè)函數(shù) foobar 相對于代碼段的起始地址是 0x100, 當(dāng)模塊被裝載到 0x10000000 時,我們假設(shè)代碼段位于模塊的最開始,即代碼段的裝載地址也是 0x10000000, 那么我們就可以確定 foobar 的地址為 0x10000100。這時候,系統(tǒng)遍歷模塊中的重定位表,把所有對 foobar 的地址引用都重定位至 0x10000100。
地址無關(guān)代碼(position-independent-code,PIC),又稱為地址無關(guān)可執(zhí)行文件(position-independent-executable,PIE)
加載時重定位解決了動態(tài)模塊中有絕對地址引用的問題,但是又帶來了指令部分無法在多個進(jìn)程間共享的問題。
具體想法就是把程序模塊中共享的指令部分在加載時不需要因?yàn)榧虞d地址的改變而改變。把指令中那些需要被修改的部分分離出來,跟數(shù)據(jù)部分放在一起,這樣指令部分就可以保持不變,而數(shù)據(jù)部分可以在每個進(jìn)程中擁有一個副本。這種方案就是目前的地址無關(guān)代碼(PIC)技術(shù)。
具體方法:先分析模塊中各種類型的地址引用方式,把共享對象模塊中地址引用按照是否跨模塊分為兩類:模塊內(nèi)部引用和模塊外部引用。按照不同的引用方式又可以分為指令引用和數(shù)據(jù)訪問。
1. 第一種是模塊內(nèi)部的函數(shù)調(diào)用、跳轉(zhuǎn)等。 2. 第二種是模塊內(nèi)部的數(shù)據(jù)訪問,比如模塊中定義的全局變量、靜態(tài)變量。 3. 第三種是模塊外部的函數(shù)調(diào)用、跳轉(zhuǎn)等。 4. 第四種是模塊外部的數(shù)據(jù)訪問,比如其它模塊中定義的全局變量。
全局偏移表(GOT)
對于類型三,我們需要用到代碼地址無關(guān)(PIC)技術(shù),基本的思想就是把跟地址相關(guān)部分放到數(shù)據(jù)段里面。ELF 的做法是在數(shù)據(jù)段里建立一個指向這些變量的指針數(shù)組,稱為全局偏移表(GOT),當(dāng)代碼需要引用該全局變量時,可以通過 GOT 中相對應(yīng)的項(xiàng)間接引用。由于 GOT 本身是放在數(shù)據(jù)段的,所以它可以在模塊裝載時被修改,并且每個進(jìn)程都可以有獨(dú)立的副本,相互不受影響。
對于跨模塊的數(shù)據(jù)訪問也是如此,不做細(xì)致分析了。
3 uboot 啟動流程第 1 階段
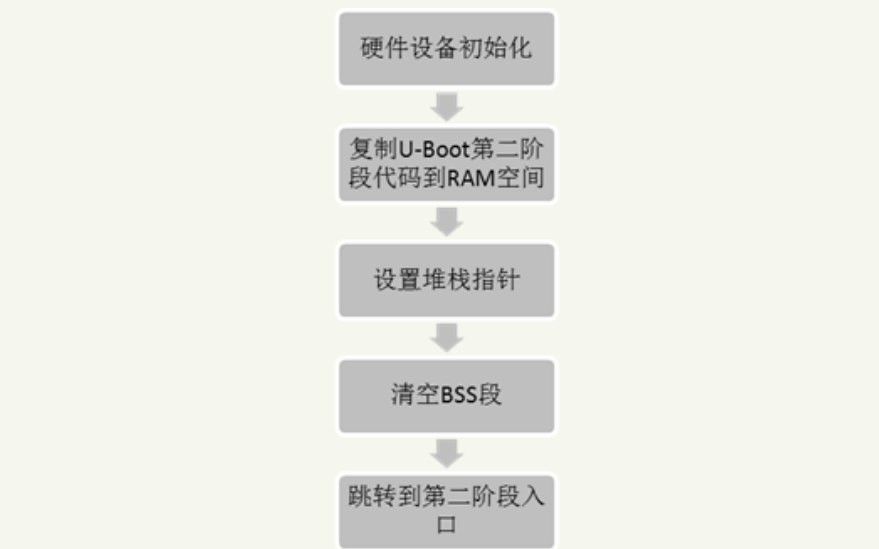
主要脈絡(luò):部分硬件初始化 -> 加載完整的 uboot 到 RAM -> 跳轉(zhuǎn)到第 2 階段入口開始執(zhí)行
第 1 階段主要用到的文件是:
start.S 文件,位于u-boot/cpu/arm920t/start.S
lowlevel_init.S 文件,位于u-boot/board/smdk2410/lowlevel_init.S
3.1 start.S 文件分析
文件位置:
1. 啟動 -_start
查看下面的代碼:
_start: # 異常處理向量表 b start_code ldr pc, _undefined_instruction # 未定義指令異常:0x00000004 ldr pc, _software_interrupt # 軟中斷異常:0x00000008 ldr pc, _prefetch_abort # 預(yù)取異常:0x0000000C ldr pc, _data_abort # 數(shù)據(jù)異常:0x00000010 ldr pc, _not_used # 未使用:0x00000014 ldr pc, _irq # 外部中斷請求IRQ:0x00000018 ldr pc, _fiq # 快束中斷請求FIQ:0x0000001C
從上面的內(nèi)容可以看出,除第 1 行代碼之外,其余代碼都是跳轉(zhuǎn)到特定位置去執(zhí)行中斷服務(wù)子程序。
正常情況下,程序的執(zhí)行流程是不會走到中斷處理流程中去的,而是直接跳轉(zhuǎn)到 reset 處開始執(zhí)行。那我們接下來就看 reset 處的代碼都干了什么。
2. reset - 設(shè)置超級管理模式
設(shè)置 CPU 為 SVC32 模式,即超級管理權(quán)限模式
start_code:
mrs r0,cpsr # 將程序狀態(tài)寄存器讀取到通用寄存器R0
bic r0,r0,#0x1f # 清除當(dāng)前的工作模式
orr r0,r0,#0xd3 # 設(shè)置超級管理員權(quán)限
msr cpsr,r0 # 將結(jié)果寫回到CPSR寄存器
cpsr 是 ARM 體系結(jié)構(gòu)中的程序狀態(tài)寄存器,其結(jié)構(gòu)如下:
| M[4:0] | CPU 模式 | 可訪問寄存器 | 說明 |
|---|---|---|---|
| 0b10000 | user | pc,R14~R0,CPSR | 正常 ARM 程序執(zhí)行狀態(tài) |
| 0b10001 | FIQ | PC,R14_FIQ-R8_FIQ,R7~R0,CPSR,SPSR_FIQ | 為支持?jǐn)?shù)據(jù)傳輸或通道處理設(shè)計(jì) |
| 0b10010 | IRQ | PC,R14_IRQ-R13_IRQ,R12~R0,CPSR,SPSR_IRQ | 用于一般用途的中斷處理 |
| 0b10011 | SUPERVISOR | PC,R14_SVC-R13_SVC,R12~R0,CPSR,SPSR_SVC | 操作系統(tǒng)保護(hù)模式 |
| 0b10111 | ABORT | PC,R14_ABT-R13_ABT,R12~R0,CPSR,SPSR_ABT | 數(shù)據(jù)或指令預(yù)取中止后進(jìn)入 |
| 0b11011 | UNDEFINED | PC,R14_UND-R8_UND,R12~R0,CPSR,SPSR_UND | 執(zhí)行未定義指令時進(jìn)入 |
| 0b11111 | SYSTEM | PC,R14-R0,CPSR(ARM V4 以及更高版本) | 操作系統(tǒng)的特權(quán)用戶模式 |
I、F、T 三位如果寫 1 即禁用,所以 reset 后面的 4 句操作的結(jié)果為設(shè)置 CPU 為 SUPERVISOR 模式且禁用中斷。那為什么選擇這個模式呢?
首先,可以排除的就是 ABORT 和 UNDEFINED 模式,看上去就不像正常模式。
其次,對于快速中斷 fiq 和中斷 irq 來說,此處 uboot 初始化的時候,也還沒啥中斷要處理和能夠處理,而且即使是注冊了終端服務(wù)程序后,
能夠處理中斷,那么這兩種模式,也是自動切換過去的,所以,此處也不應(yīng)該設(shè)置為其中任何一種模式。
于 usr 模式,由于此模式無法直接訪問很多的硬件資源,而 uboot 初始化,就必須要去訪問這類資源,所以此處可以排除,不能設(shè)置為用戶 usr 模式。
而 svc 模式本身就屬于特權(quán)模式,本身就可以訪問那些受控資源,而且,比 sys 模式還多了些自己模式下的影子寄存器,所以,相對 sys 模式來說,
可以訪問資源的能力相同,但是擁有更多的硬件資源。
3. 關(guān)閉看門狗
ldr r0, =pWTCON # 取得看門狗寄存器的地址 mov r1, #0x0 # 將R1寄存器清0 str r1, [r0] # 將看門狗寄存器清0,即將看門狗禁止,包括定時器定時,溢出中斷及溢出復(fù)位等
4. 關(guān)中斷
mov r1, #0xffffffff # 設(shè)R1寄存器為0xFFFF FFFF ldr r0, =INTMSK # 讀取中斷屏蔽寄存器的地址 str r1, [r0] # 將中斷屏蔽寄存器中的位全設(shè)1,屏蔽所有中斷 ldr r1, =INTSUBMSK_val # 設(shè)R1寄存器為0xFFFF ldr r0, =INTSUBMSK # 讀取輔助中斷屏蔽寄存器的地址 str r1, [r0] # 將輔助中斷屏蔽寄中的11個中斷信號屏蔽掉,本人覺得INTSUBMS_val應(yīng)設(shè)成7ff
5. 設(shè)置時鐘
6. 關(guān)閉 MMU,設(shè)置 ARM 時序
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
cpu_init_crit:
// 使I/D cache失效:協(xié)處理寄存器操作,將r0中的數(shù)據(jù)寫入到協(xié)處理器p15的c7中,c7對應(yīng)cp15的cache控制寄存器
mov r0, #0
mcr p15, 0, r0, c7, c7, 0 /* flush v3/v4 cache */
mcr p15, 0, r0, c8, c7, 0 /* flush v4 TLB */ 使TLB操作寄存器失效:將r0數(shù)據(jù)送到cp15的c8、c7中。C8對應(yīng)TLB操作寄存器
/*
* 禁用MMU和緩存
*/
mrc p15, 0, r0, c1, c0, 0 // 將c1、c0的值寫入到r0中
bic r0, r0, #0x00002300 @ clear bits 13, 9:8 (--V- --RS)
bic r0, r0, #0x00000087 @ clear bits 7, 2:0 (B--- -CAM)
orr r0, r0, #0x00000002 @ set bit 2 (A) Align
orr r0, r0, #0x00001000 @ set bit 12 (I) I-Cache
mcr p15, 0, r0, c1, c0, 0 // 將設(shè)置好的r0值寫入到協(xié)處理器p15的c1、c0中,關(guān)閉MMU
/*
* 在重加載之前,我們必須設(shè)置RAM的時序,因?yàn)閮?nèi)存的時序依賴于板子,
* 在board目錄下可以發(fā)現(xiàn)lowlevel_init.S文件
*/
mov ip, lr // 將lr寄存器內(nèi)容保存到ip寄存器中,用于子程序調(diào)用返回
#if defined(CONFIG_AT91RM9200DK) || defined(CONFIG_AT91RM9200EK) || defined(CONFIG_AT91RM9200DF)
#else
bl lowlevel_init // 跳轉(zhuǎn)到`lowlevel_init`地址執(zhí)行
#endif
mov lr, ip
mov pc, lr
#endif /* CONFIG_SKIP_LOWLEVEL_INIT */
1. Cache 是什么呢?
Cache 是處理器內(nèi)部的一個高速緩存單元,為了應(yīng)對處理器和外部存儲器之間的速度不匹配而設(shè)立的。其速度要比內(nèi)存的讀寫速度快好多,接近處理器的工作速度,一般處理器從內(nèi)存中讀取數(shù)據(jù)到 Cache 中,到下次再用到數(shù)據(jù)時,會先去 cache 中查找,如果 cache 中存在的話,就不會訪問內(nèi)存了,用以提高系統(tǒng)性能。
2. 系統(tǒng)引導(dǎo)時為什么關(guān)閉 Cache?
從上面的解釋中,可以看出,在系統(tǒng)未初始化完成時,代碼還沒有轉(zhuǎn)移到內(nèi)存中,也就是說,我們還沒有用到內(nèi)存,先將 MMU 和 Cache 關(guān)閉,以免發(fā)生不可預(yù)料的錯誤。
3. 怎樣使 Cache 中的數(shù)據(jù)無效?
見上面的代碼。
3.2 lowlevel_init.S 文件分析
3.2.1 RAM 初始化
這一步主要完成 RAM 的初始化,也就是通過寫控制 RAM 的寄存器,對寄存器的存取方式進(jìn)行控制。主要代碼位于文件lowlevel_init.S中。
lowlevel_init.S文件內(nèi)容如下:
lowlevel_init:
/* memory control configuration */
/* make r0 relative the current location so that it */
/* reads SMRDATA out of FLASH rather than memory ! */
ldr r0, =SMRDATA // 讀取下面標(biāo)號為SMRDATA處的地址到R0中
ldr r1, _TEXT_BASE // 程序的加載地址 TEXT_BASE = 0x33F80000 到 R1中
sub r0, r0, r1 // 計(jì)算SMRDATA的相對地址保存到R0中,
/* SMRDATA為虛擬地址,而TEXT_BASE為虛擬地址的起始地址
* TEXT_BASE為0x33F8 0000,SMRDATA為0x33F8 06C8
* 而現(xiàn)在程序運(yùn)行在起始地址為0x0000 0000的地方
* 所以需要計(jì)算以0x0000 0000為標(biāo)準(zhǔn)的相對地址 */
ldr r1, =BWSCON // 取得帶寬與等待狀態(tài)控制寄存器地址到R1中,也就是控制內(nèi)存的寄存器的首地址
add r2, r0, #13*4 // R2保存要操作的寄存器的個數(shù),在這兒是13
0:
ldr r3, [r0], #4 // 數(shù)據(jù)處理后R0自加4,[R0]->R3,R0+4->R0
str r3, [r1], #4 // 將這些數(shù)據(jù)寫入到控制內(nèi)存的寄存器中。
cmp r2, r0 // 循環(huán)從Flash中讀取13個Word大小的值到內(nèi)存中
bne 0b
mov pc, lr // 返回函數(shù)lowlevel_init()的調(diào)用地方
.ltorg
/* the literal pools origin */
SMRDATA:
.word (0+(B1_BWSCON<<4)+(B2_BWSCON<<8)+(B3_BWSCON<<12)+(B4_BWSCON<<16)+(B5_BWSCON<<20)+(B6_BWSCON<<24)+(B7_BWSCON<<28))
.word ((B0_Tacs<<13)+(B0_Tcos<<11)+(B0_Tacc<<8)+(B0_Tcoh<<6)+(B0_Tah<<4)+(B0_Tacp<<2)+(B0_PMC))
.word ((B1_Tacs<<13)+(B1_Tcos<<11)+(B1_Tacc<<8)+(B1_Tcoh<<6)+(B1_Tah<<4)+(B1_Tacp<<2)+(B1_PMC))
.word ((B2_Tacs<<13)+(B2_Tcos<<11)+(B2_Tacc<<8)+(B2_Tcoh<<6)+(B2_Tah<<4)+(B2_Tacp<<2)+(B2_PMC))
.word ((B3_Tacs<<13)+(B3_Tcos<<11)+(B3_Tacc<<8)+(B3_Tcoh<<6)+(B3_Tah<<4)+(B3_Tacp<<2)+(B3_PMC))
.word ((B4_Tacs<<13)+(B4_Tcos<<11)+(B4_Tacc<<8)+(B4_Tcoh<<6)+(B4_Tah<<4)+(B4_Tacp<<2)+(B4_PMC))
.word ((B5_Tacs<<13)+(B5_Tcos<<11)+(B5_Tacc<<8)+(B5_Tcoh<<6)+(B5_Tah<<4)+(B5_Tacp<<2)+(B5_PMC))
.word ((B6_MT<<15)+(B6_Trcd<<2)+(B6_SCAN))
.word ((B7_MT<<15)+(B7_Trcd<<2)+(B7_SCAN))
//設(shè)置REFRESH,在S3C2440中11~17位是保留的,也即(Tchr<<16)無意義
.word ((REFEN<<23)+(TREFMD<<22)+(Trp<<20)+(Trc<<18)+(Tchr<<16)+REFCNT)
.word 0x32 // 設(shè)置BANKSIZE,對于容量可以設(shè)置大寫,多出來的空內(nèi)存會被自動檢測出來
.word 0x30 // 設(shè)置MRSRB6
.word 0x30 // 設(shè)置MRSRB7
3.2.2 Uboot 代碼加載
#ifndef CONFIG_SKIP_RELOCATE_UBOOT
adr r0, _start /* r0保存當(dāng)前程序的位置 */
relocate: /* 將uboot代碼重定位到RAM中 */
teq r0, #0 /* 測試是否從地址0開始運(yùn)行 */
bleq may_resume /* yes -> do low-level setup */
adr r0, _start /* 上面的代碼有可能會破會r0中的值 */
ldr r1, _TEXT_BASE /* 測試從Flash還是RAM中運(yùn)行程序,它們的地址是不一樣的 */
cmp r0, r1 /* 在debug期間不需要重定位,直接在Flash中運(yùn)行代碼 */
beq done_relocate
ldr r2, _armboot_start
ldr r3, _bss_start
sub r2, r3, r2 /* 根據(jù)前面分析的uboot.lds文件可知,r3-r2就是uboot代碼的大小,將其存入寄存器r2中 */
add r2, r0, r2 /* r0是程序的起始地址,加上uboot代碼的大小就是uboot代碼的結(jié)束地址 */
copy_loop:
ldmia r0!, {r3-r10} /* 從源地址[r0]處開始拷貝 */
stmia r1!, {r3-r10} /* 拷貝到目標(biāo)地址[r1]處 */
cmp r0, r2 /* 直到源代碼結(jié)束地址[r2] */
ble copy_loop
3.2.3 建立堆棧
設(shè)置堆棧,其中,_TEXT_BASE=0x33F80000,而CFG_MALLOC_LEN,CFG_GBL_DATA_SIZE,CONFIG_STACKSIZE_IRQ,CONFIG_STACKSIZE_FIQ在文件uboot/include/configs/mini2440.h文件中定義。
/* 建立堆棧 */
stack_setup:
ldr r0, _TEXT_BASE /* upper 128 KiB: relocated uboot */
sub r0, r0, #CFG_MALLOC_LEN /* malloc area */
sub r0, r0, #CFG_GBL_DATA_SIZE /* bdinfo */
#ifdef CONFIG_USE_IRQ
sub r0, r0, #(CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ)
#endif
sub sp, r0, #12 /* leave 3 words for abort-stack */
3.2.4 清除 bss 段
clear_bss:
ldr r0, _bss_start /* find start of bss segment */
ldr r1, _bss_end /* stop here */
mov r2, #0x00000000 /* clear */
clbss_l:str r2, [r0] /* clear loop... */
add r0, r0, #4
cmp r0, r1
ble clbss_l
3.2.5 跳轉(zhuǎn)到 uboot 第 2 階段
ldr pc, _start_armboot _start_armboot: .word start_armboot
初始化外設(shè)完成之后,程序跳轉(zhuǎn)到 u-boot 第 2 階段的入口函數(shù)start_armboot。ldr pc,_start_armboot為絕對跳轉(zhuǎn)命令,pc 值等于_start_armboot的連接地址,程序跳到 SDRAM 中執(zhí)行。在此之前程序都是在 flash 中運(yùn)行的,絕對跳轉(zhuǎn)必須在初始 SDRAM,執(zhí)行代碼重定位之后才能進(jìn)行。
4 uboot 啟動流程第 2 階段
第 2 階段,uboot 完成進(jìn)一步的硬件初始化,并設(shè)置了 uboot 下的命令行、環(huán)境變量、并跳轉(zhuǎn)到內(nèi)核中。其主要用到的文件是:
board.c 文件,位于u-boot/lib_arm/board.c
main.c 文件,位于u-boot/common/main.c
4.1 初始化
void start_armboot (void)
{
init_fnc_t **init_fnc_ptr;
char *s;
#ifndef CFG_NO_FLASH
ulong size;
#endif
#if defined(CONFIG_VFD) || defined(CONFIG_LCD)
unsigned long addr;
#endif
/* 在上面的代碼中g(shù)d的值綁定到寄存器r8中了 */
gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));
/* 為GCC >= 3.4以上的編譯進(jìn)行代碼優(yōu)化,而插入內(nèi)存barrier */
__asm__ __volatile__("": : :"memory");
memset ((void*)gd, 0, sizeof (gd_t));
gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));
memset (gd->bd, 0, sizeof (bd_t));
monitor_flash_len = _bss_start - _armboot_start;
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
首先,我們先來分析init_fnc_t **init_fnc_ptr;這行代碼。
要分析這行代碼,首先看指針數(shù)組init_fnc_t *init_sequence[]
typedef int (init_fnc_t) (void);
init_fnc_t *init_sequence[] = {
cpu_init, /* 與CPU相關(guān)的初始化 */
board_init, /* 與板子初始化相關(guān)的初始化 */
interrupt_init, /* 中斷初始化 */
env_init, /* 初始化環(huán)境變量 */
init_baudrate, /* 初始化波特率設(shè)置 */
serial_init, /* serial通信相關(guān)初始化 */
console_init_f, /* console初始化的第一部分 */
display_banner, /* say that we are here */
// ...根據(jù)配置,還有一些其它的初始化
dram_init, /* 配置可用的RAM塊 */
display_dram_config,
NULL,
};
根據(jù)這兒的分析,我們就可以知道init_fnc_ptr就是一個函數(shù)指針。在后面的 for 循環(huán)中,將函數(shù)指針數(shù)組的首地址init_sequence賦值給init_fnc_ptr,然后循環(huán),對所有的硬件進(jìn)行初始化。
而對于代碼gd = (gd_t*)(_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t));確實(shí)有些抽象。而要分析它,必須看一下下面這個宏定義:
DECLARE_GLOBAL_DATA_PTR; //在board.c最上面
而它的定義如下:
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r8")
這個聲明,告訴編譯器使用寄存器 r8 來存儲 gd_t 類型的指針 gd,即這個定義聲明了一個指針,并且指明了它的存儲位置。也就是說,我們聲明了一個寄存器變量,它的初始值為_armboot_start - CFG_MALLOC_LEN - sizeof(gd_t),也就是0x33F80000-(0x20000+2048*1024)-0x24。也就是說,gd 指向了一段可用的內(nèi)存區(qū)域,而這段內(nèi)存區(qū)域相當(dāng)于 u-boot 的全局變量。
那指針 gd 指向的數(shù)據(jù)結(jié)構(gòu)到底是什么呢?為什么要設(shè)置這個數(shù)據(jù)結(jié)構(gòu)呢?那么接下來讓我們看一下這個數(shù)據(jù)結(jié)構(gòu)吧。
typedef struct global_data {
bd_t *bd;
unsigned long flags;
unsigned long baudrate;
unsigned long have_console; /* serial_init() 函數(shù)被調(diào)用 */
unsigned long reloc_off; /* Relocation Offset */
unsigned long env_addr; /* Address of Environment struct */
unsigned long env_valid; /* Checksum of Environment valid? */
unsigned long fb_base; /* base address of frame buffer */
#ifdef CONFIG_VFD
unsigned char vfd_type; /* display type */
#endif
void **jt; /* jump table */
} gd_t;
這個數(shù)據(jù)結(jié)構(gòu)是系統(tǒng)初始化的最小全局變量值,主要在 boot 引導(dǎo)的早期使用,直到我們設(shè)置好內(nèi)存控制器并能夠訪問 RAM。注意,保證CFG_GBL_DATA_SIZE大于sizeof(gd_t)。
對于其中的變量,我們進(jìn)行重點(diǎn)分析。bd_t *bd;這句話中,結(jié)構(gòu)體bd_t的內(nèi)容如下:
typedef struct bd_info {
int bi_baudrate; /* 串口控制臺波特率 */
unsigned long bi_ip_addr; /* IP 地址 */
unsigned char bi_enetaddr[6]; /* Ethernet adress */
struct environment_s *bi_env;
ulong bi_arch_number; /* 該板唯一的ID */
ulong bi_boot_params; /* 存放參數(shù)的地方 */
struct /* RAM配置 */
{
ulong start;
ulong size;
} bi_dram[CONFIG_NR_DRAM_BANKS];
// ......
} bd_t;
從上面的代碼中,可以看出,在該結(jié)構(gòu)體內(nèi),存放著 boot 引導(dǎo)前期,系統(tǒng)初始化的最小集合。要么通過串口打印,要么通過網(wǎng)絡(luò)打印進(jìn)行人機(jī)交互。
// ...... 此處,如果有LCD等設(shè)備,為其準(zhǔn)備內(nèi)存空間
/* armboot_start在與板子相關(guān)的鏈接腳本文件中定義,初始化動態(tài)內(nèi)存 */
mem_malloc_init (_armboot_start - CFG_MALLOC_LEN);
// 其他存儲空間的初始化
env_relocate (); /* 初始化環(huán)境變量 */
gd->bd->bi_ip_addr = getenv_IPaddr ("ipaddr"); /* 得到IP地址 */
/* 獲取MAC地址 */
{
int i;
ulong reg;
char *s, *e;
char tmp[64];
i = getenv_r ("ethaddr", tmp, sizeof (tmp));
s = (i > 0) ? tmp : NULL;
for (reg = 0; reg < 6; ++reg) {
gd->bd->bi_enetaddr[reg] = s ? simple_strtoul (s, &e, 16) : 0;
if (s)
s = (*e) ? e + 1 : e;
}
// ...
}
devices_init (); /* 獲取設(shè)備列表 */
jumptable_init ();
console_init_r (); /* 將完全初始化的控制臺作為一個設(shè)備 */
enable_interrupts (); /* 使能異常中斷 */
/* 如果有必要,執(zhí)行網(wǎng)卡的初始化工作 */
/* main_loop() can return to retry autoboot, if so just run it again. */
for (;;) {
main_loop ();
}
/* 不可到達(dá) */
}
4.2 加載內(nèi)核
首先,我們將main_loop函數(shù)進(jìn)行簡化,如下圖所示。這個流程非常簡單明了。
void main_loop (void)
{
static char lastcommand[CFG_CBSIZE] = { 0, };
int len;
int rc = 1;
int flag;
char *s;
int bootdelay;
s = getenv ("bootdelay"); // 獲取延時時間
bootdelay = s ? (int)simple_strtol(s, NULL, 10) : CONFIG_BOOTDELAY;
s = getenv ("bootcmd"); // 獲取引導(dǎo)命令
// 判斷延時時間是否到,到了的話直接執(zhí)行引導(dǎo)命令;如果在此期間有按鍵按下,則進(jìn)入For循環(huán)
if (!nobootdelay && bootdelay >= 0 && s && !abortboot (bootdelay)) {
run_command (s, 0);
}
// 主循環(huán),監(jiān)控命令,并根據(jù)命令作出相應(yīng)的處理
for (;;) {
len = readline (CFG_PROMPT);
flag = 0; /* assume no special flags for now */
if (len > 0)
strcpy (lastcommand, console_buffer);
else if (len == 0)
flag |= CMD_FLAG_REPEAT;
// ......其它代碼
if (len == -1)
puts ("
");
else
rc = run_command (lastcommand, flag); /* 執(zhí)行命令 */
if (rc <= 0) {
lastcommand[0] = 0; /* 非法的或不可重復(fù)的命令 */
}
}
}
下面我們來看run_command函數(shù)的內(nèi)容,看看到底在執(zhí)行什么。經(jīng)簡化可得,這個函數(shù)有 2 種流程,一種是按照 hush 表查找命令,另一種就是下面這個,簡單粗暴:
int run_command(const char *cmd, int flag)
{
if (builtin_run_command(cmd, flag) == -1)
return 1;
return 0;
}
那么,我們再來看函數(shù)builtin_run_command:
static int builtin_run_command(const char *cmd, int flag)
{
//合法性校驗(yàn)
while (*str) {
//特殊字符解析
}
process_macros (token, finaltoken); //宏展開,即完全解析命令
//命令執(zhí)行過程
if (cmd_process(flag, argc, argv, &repeatable))
rc = -1;
return rc ? rc : repeatable;
}
最后,我們再來看一下函數(shù)cmd_process:
cmd_process(int flag, int argc, char * const argv[],
int *repeatable)
{
cmd_tbl_t *cmdtp;
cmdtp = find_cmd(argv[0]); //查找命令
if (cmdtp == NULL) {
printf("Unknown command '%s' - try 'help'
", argv[0]);
return 1;
}
if (argc > cmdtp->maxargs)
rc = CMD_RET_USAGE;
/* If OK so far, then do the command */
if (!rc) {
rc = cmd_call(cmdtp, flag, argc, argv); //真正的執(zhí)行命令
*repeatable &= cmdtp->repeatable;
}
return rc;
}
至此,uboot 的使命便完成了,將執(zhí)行的權(quán)利交給 linux 內(nèi)核。
審核編輯:湯梓紅
-
存儲器
+關(guān)注
關(guān)注
38文章
7625瀏覽量
166239 -
內(nèi)核
+關(guān)注
關(guān)注
3文章
1406瀏覽量
41046 -
Linux
+關(guān)注
關(guān)注
87文章
11446瀏覽量
212624 -
操作系統(tǒng)
+關(guān)注
關(guān)注
37文章
7059瀏覽量
124873 -
Uboot
+關(guān)注
關(guān)注
4文章
126瀏覽量
28837
原文標(biāo)題:uboot 啟動流程詳細(xì)分析參考
文章出處:【微信號:嵌入式開發(fā)愛好者,微信公眾號:嵌入式開發(fā)愛好者】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
tiny210上uboot啟動分析
【OK210試用體驗(yàn)】+ 《uboot啟動過程分析》
【OK210試用體驗(yàn)】+ 《uboot啟動過程分析》
嵌入式的基本概念及其應(yīng)用
STM32的中斷系統(tǒng)基本概念
關(guān)于uboot的功能分析透徹方案
uboot的配置流程分析
一文分析Uboot啟動流程
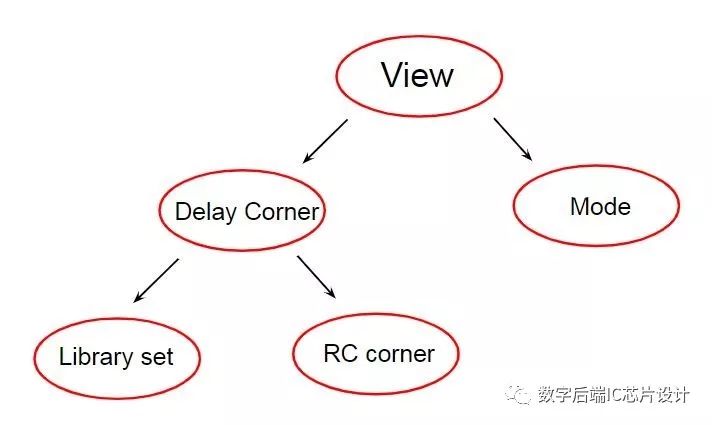
介紹時序分析基本概念MMMC
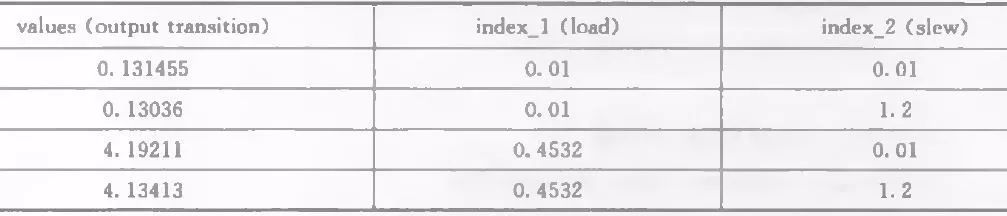
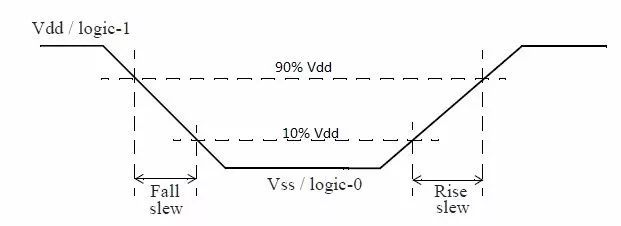
時序分析Slew/Transition基本概念介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論