 步進電機的機械原理
步進電機的機械原理
一、 步進電機分類
1.1、 反應式步進電機(VR):轉子由軟磁材料制成,結構簡單、成本低、動態力學性能差、步距角可以很小;
1.2、 永磁式步進電機(PM):轉子由永磁材料制成,轉子級數少,步距角大,力矩大,動態性能好;
1.3、 混合式步進電機(HB):結合VR、PM電機優點,輸出力矩大、步距角小、動態性能好,目前使用最為廣泛,下述以該類電機為例進行介紹。
二、 兩相混合式步進電機結構
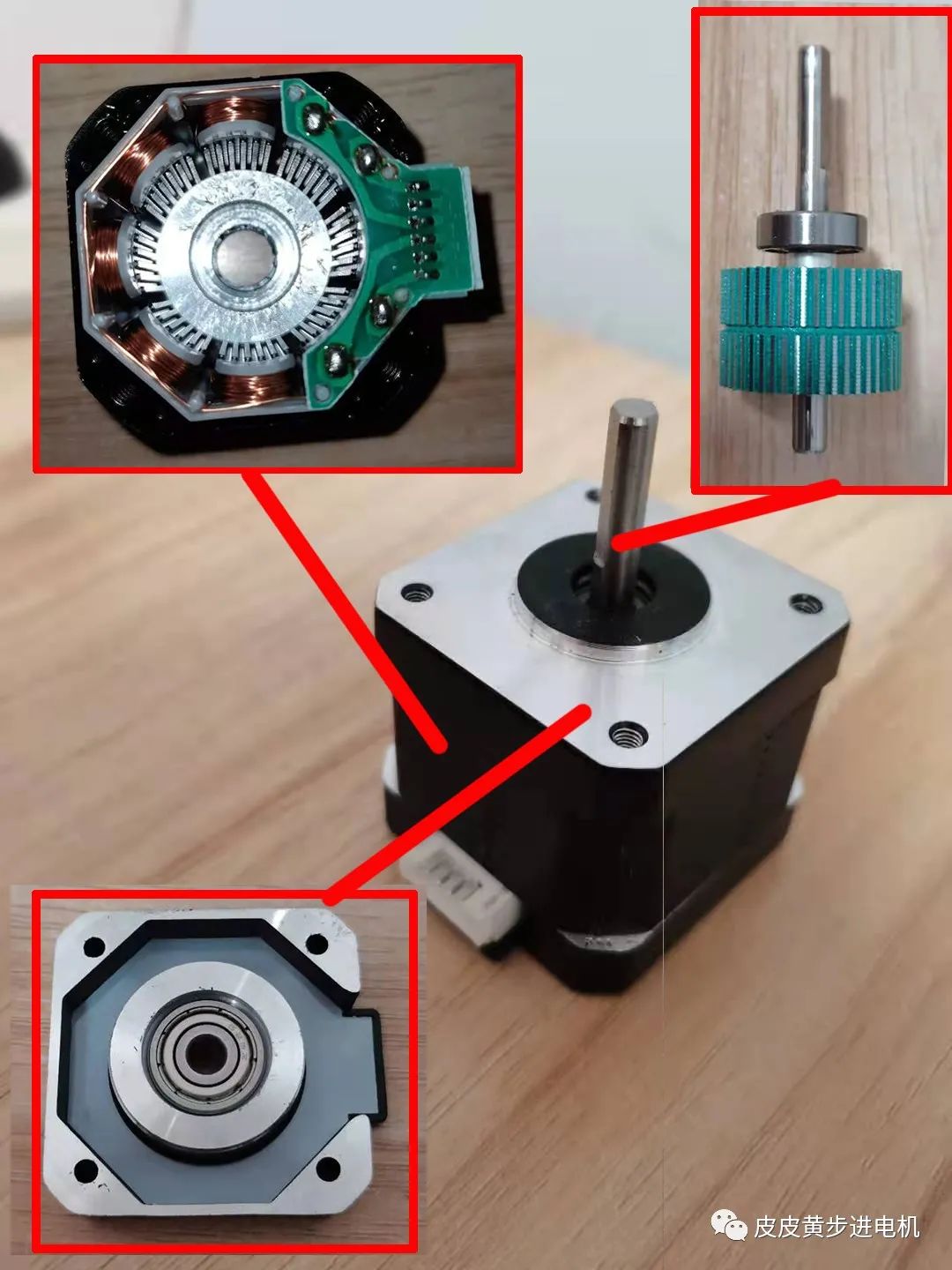
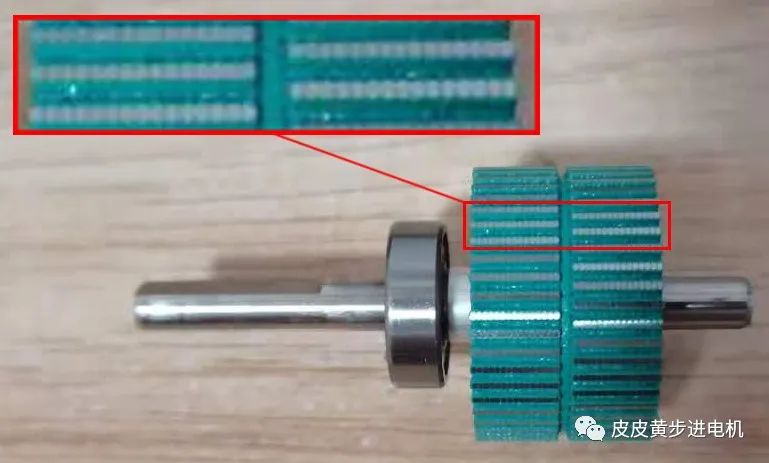
2.1、 實物圖如下所示,主要由定子、轉子、端蓋組成
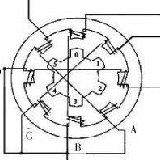
2.2、結構示意圖如下所示
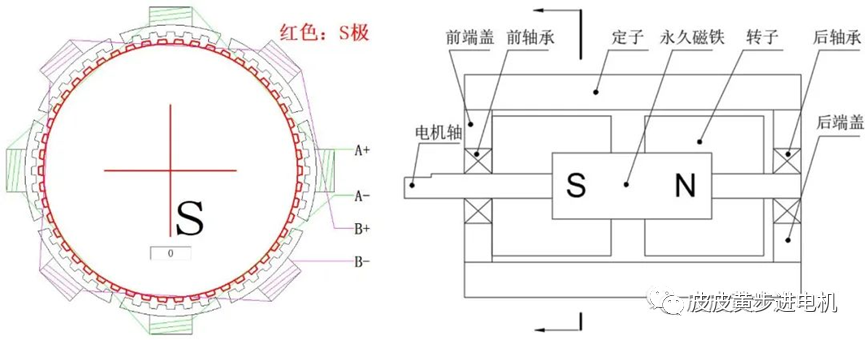
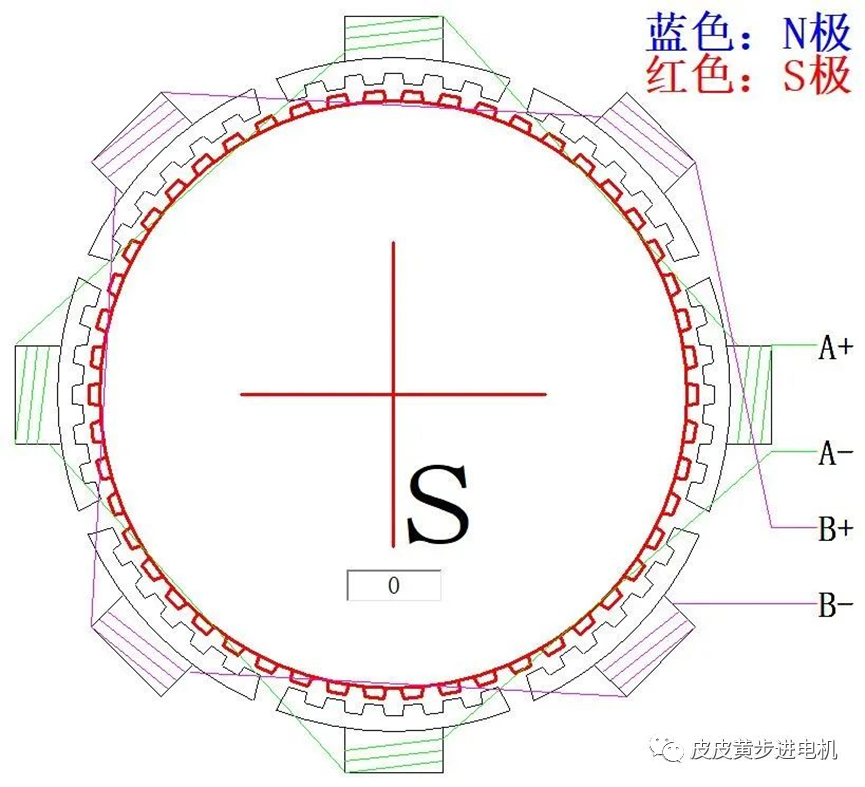
2.3、剖視圖分析(剖切轉子S端)
定子有8個磁極,如下圖所示,綠色繞線的為A相,洋紅色繞線的為B相。轉子有50個齒,均勻分布。定子每個磁極有6個齒,總計8*6=48齒。當A相定子有一對磁極齒與轉子齒完全對齊時,A相定子另一對磁極齒必定與轉子齒完全錯開,此時B相定子齒與轉子齒呈半齒對齊(或者半齒錯開)。同理可以判斷B相定子齒與轉子齒對齊時的狀態。
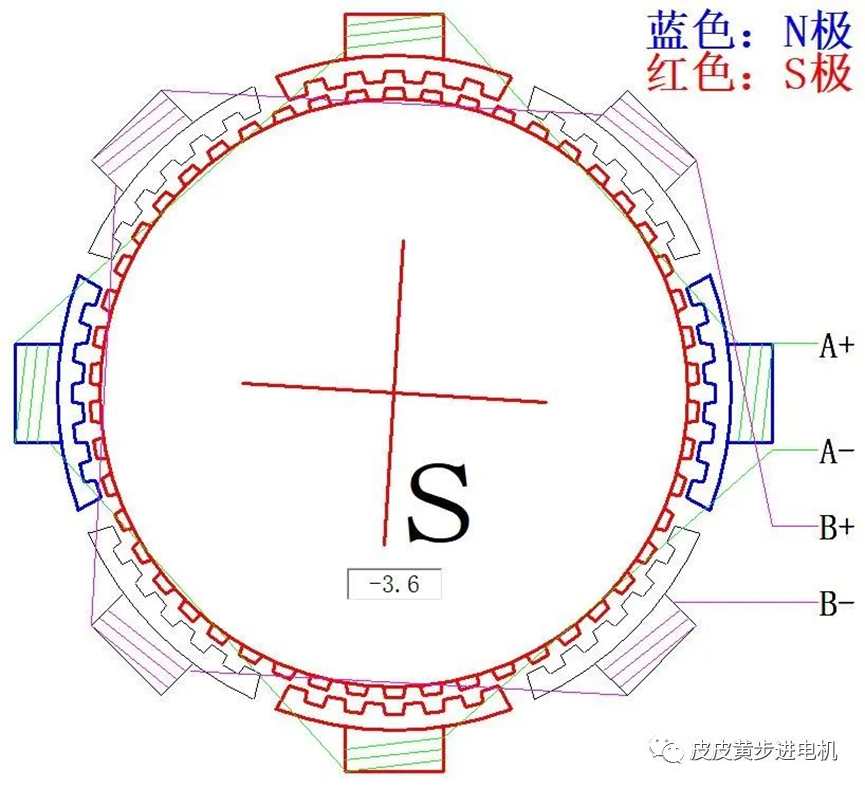
2.4、轉動原理
①當A+接電源正極,A-接電源負極時,A相線圈導通,產生磁場,如圖下圖所示,A相藍色的N極與轉子的S極相互吸引對齊,同時A相的S極與轉子S極相互排斥而錯開,此時達到穩定狀態

②當B+接電源正極,B-接電源負極時,B相導通,此時狀態如下

③當A-接電源正極,A+接電源負極時,A相導通,此時狀態如下
④當B-接電源正極,B+接電源負極時,B相導通,此時狀態如下

⑤然后回到①圖狀態,經過4個步驟,轉子轉過一個齒,轉子每一個齒對應的角度是360/50=7.2°,所以每一個步驟,電機轉過的角度就是7.2°/4=1.8°,即步進電機的步距角
2.5、完整畫如下
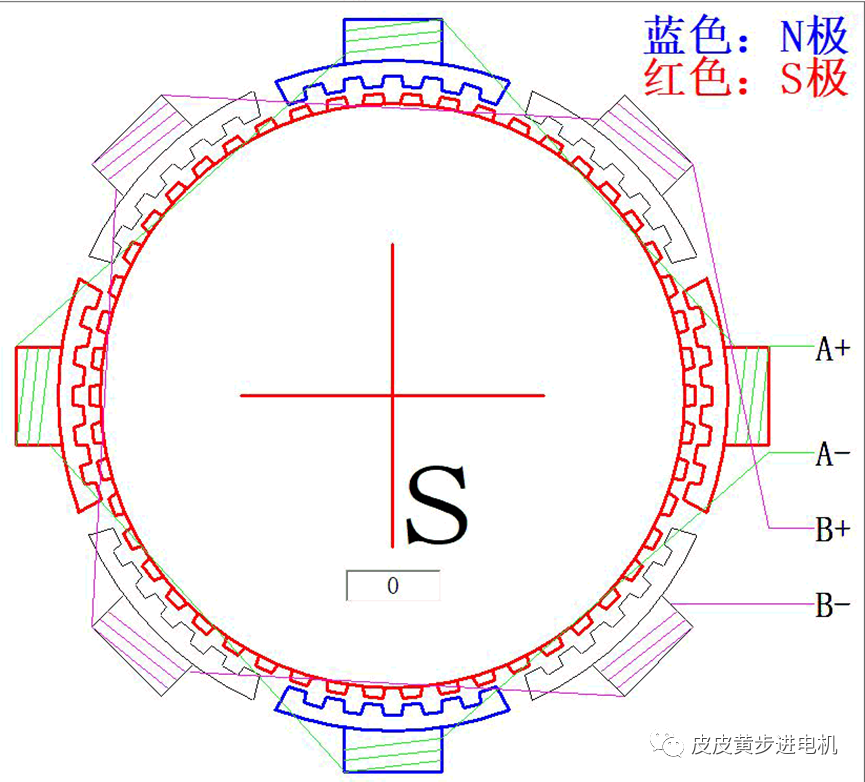
2.6、轉子N極布局
上述解釋的是轉子S受力,轉子N極齒與S極齒是完全錯開的,如下圖所示,受力分析與S極是一樣的。
三、步進電機演示器功能介紹
為了方便直觀的理解電機轉動原理,制作了電機演示器,可以手動操作,也可以自動操作,具有4拍和8拍模式,速度也可自行調節

-
磁場
+關注
關注
3文章
877瀏覽量
24212 -
步進電機
+關注
關注
150文章
3109瀏覽量
147449
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論