") 自動駕駛高精組合導(dǎo)航設(shè)備拆解-導(dǎo)遠(yuǎn)570D
自動駕駛高精組合導(dǎo)航設(shè)備拆解-導(dǎo)遠(yuǎn)570D
這期帶來自動駕駛高精組合導(dǎo)航設(shè)備拆解,本次拆解分析的產(chǎn)品是導(dǎo)遠(yuǎn)570D。
導(dǎo)遠(yuǎn)INS570D 是一款基于 MEMS 慣性導(dǎo)航技術(shù)、融合衛(wèi)星導(dǎo)航(支持 RTK)和車輛信息(輪速、檔位等)、滿足車規(guī)級標(biāo)準(zhǔn)設(shè)計和制造的高性能組合導(dǎo)航定位產(chǎn)品。具備在多種場景下向車輛提供準(zhǔn)確姿態(tài)、航向、位置、速度和傳感器數(shù)據(jù)等信息的能力。
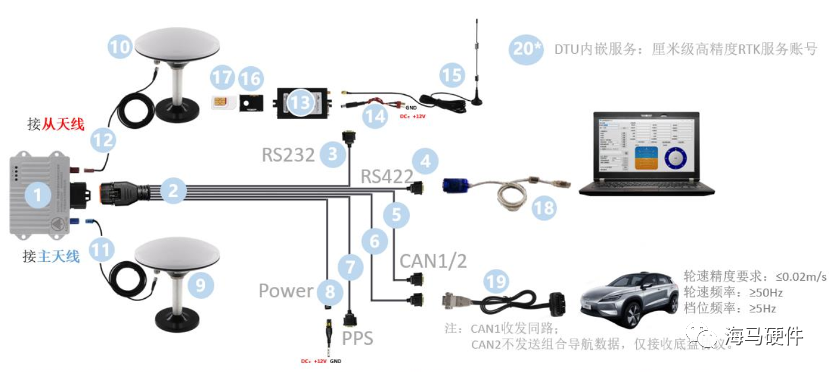
導(dǎo)遠(yuǎn)570D實(shí)驗裝置整體配置示意圖。
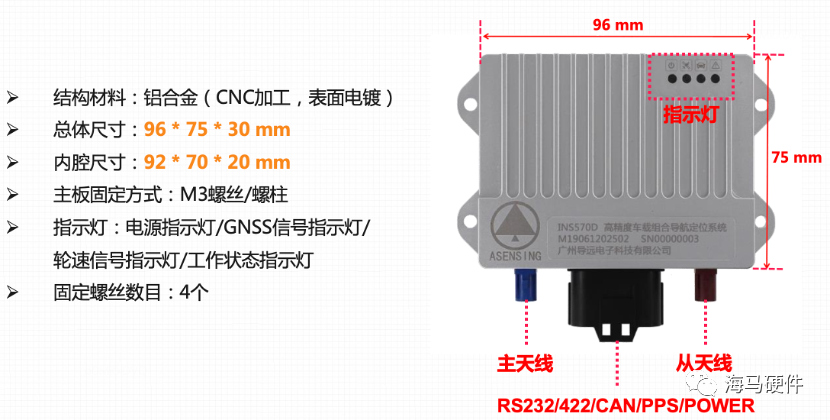
一外形結(jié)構(gòu)概覽
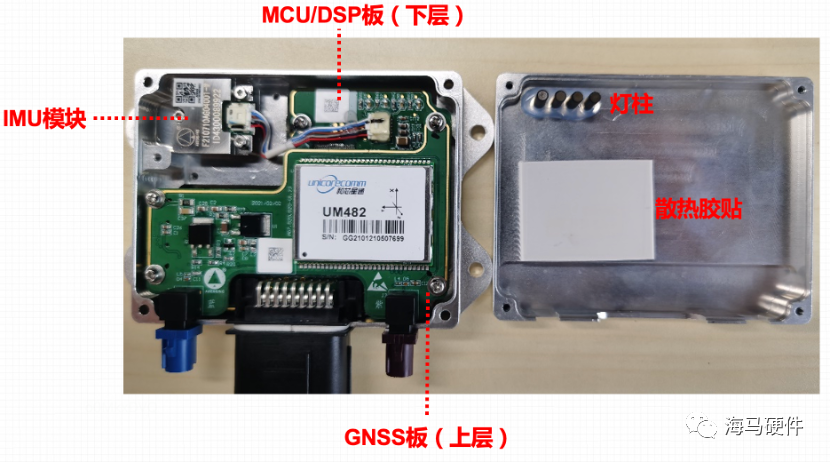
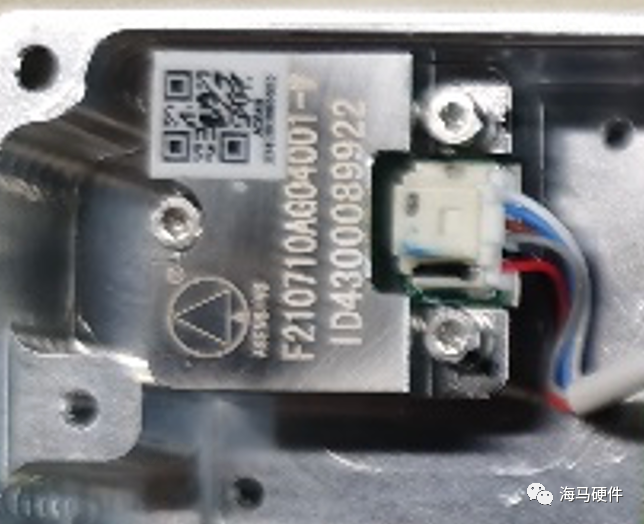
先打開上蓋,主要由獨(dú)立慣性測量單元(IMU模塊)和主控底板+GNSS板三部分組成。
在組合導(dǎo)航系統(tǒng)中,IMU提供快速、實(shí)時的運(yùn)動和姿態(tài)信息,但I(xiàn)MU存在累積誤差,通常會與衛(wèi)星定位結(jié)合使用,對IMU的數(shù)據(jù)進(jìn)行校準(zhǔn),提高長期的導(dǎo)航精度。 在沒有外部參考點(diǎn)或信號(如GNSS信號)丟失的情況下,組合導(dǎo)航算法主要依賴IMU提供連續(xù)的、未校準(zhǔn)的導(dǎo)航數(shù)據(jù)。這一點(diǎn)在隧道、城市峽谷或其他衛(wèi)星信號可能被阻擋的環(huán)境中尤為重要。 IMU是實(shí)現(xiàn)高精度和高可靠性組合導(dǎo)航的基礎(chǔ)組件之一,它為系統(tǒng)提供快速的動態(tài)響應(yīng),確保了在各種條件下都有穩(wěn)定的導(dǎo)航能力。
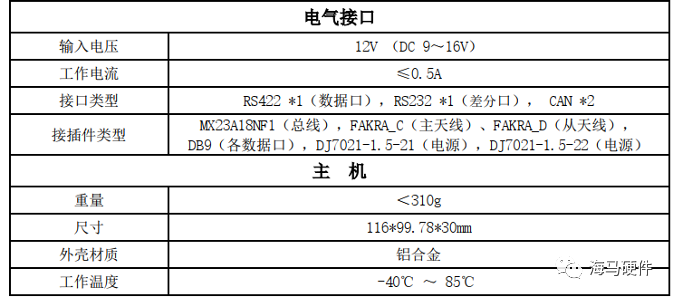
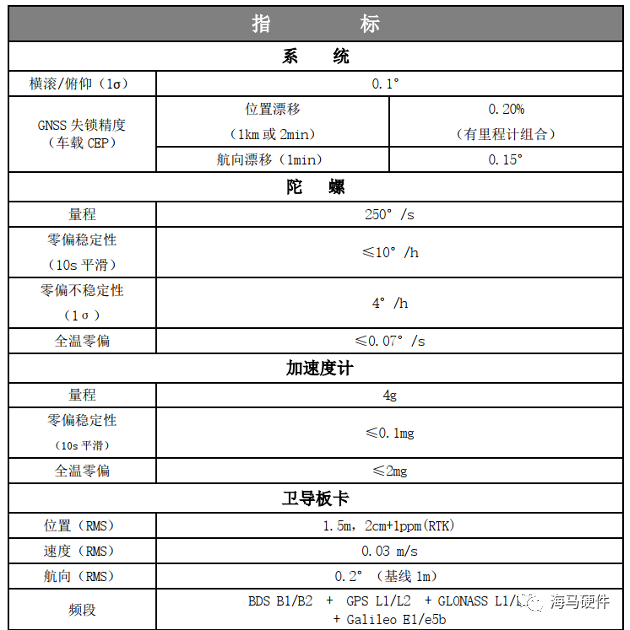
二核心技術(shù)參數(shù)
以下是導(dǎo)遠(yuǎn)570D的核心技術(shù)參數(shù):
GNSS相關(guān)可以參考:
衛(wèi)星定位技術(shù)學(xué)習(xí)筆記(GPS/北斗/SBAS/RTK/RTD/NMEA/CEP等等)
深度剖析GNSS高精度定位原理
這里簡單介紹一下IMU相關(guān)的技術(shù)參數(shù)指標(biāo)含義:
全溫零偏:在全程溫度范圍,輸入為零時,輸出一條復(fù)合白噪聲信號緩慢變化的曲線,曲線的平均值就是零偏
零偏穩(wěn)定性:當(dāng)輸入為零時,衡量陀螺儀輸出量圍繞其均值(零偏)的離散程度。要注意評估條件,如平滑時間(1s、10s),標(biāo)準(zhǔn)差(1σ),測試溫度。一般為 x deg/hr 1σ 或 x °/hr 1σ
零偏不穩(wěn)定性:描述一段時間之后,MEMS的零偏的變化情況。零偏穩(wěn)定性通常定義為1σ值,單位為°/√h,又稱為零漂,并不是一個完全的隨機(jī)游走,它的范圍是有限的,零漂對角度的影響是線性的
零偏重復(fù)性:在同樣條件下及規(guī)定時間間隔內(nèi),重復(fù)測量零偏之間的一致程度,以各次測試得到的零偏的標(biāo)準(zhǔn)差表示。單位為°/h,°/s
隨機(jī)游走:傳感器的高斯白噪聲,單位一般為deg/√h或deg/s/√Hz,需要區(qū)別角速率輸出還是角增量輸出
溫度補(bǔ)償范圍:傳感器額定輸出和零點(diǎn)輸出的溫度影響不超過規(guī)定技術(shù)指標(biāo)的環(huán)境溫度范圍
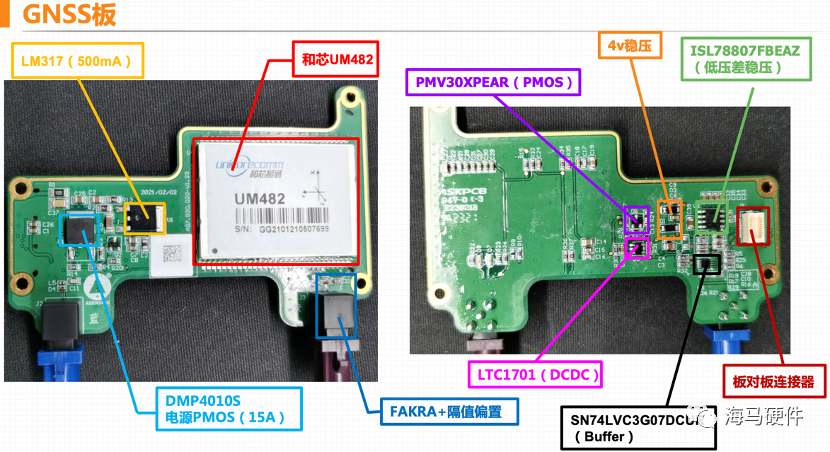
三GNSS板拆解
上層GNSS板主要負(fù)責(zé)衛(wèi)星定位數(shù)據(jù)采集,雙天線輸入,高精定位模組采用了和芯星通的UM482。
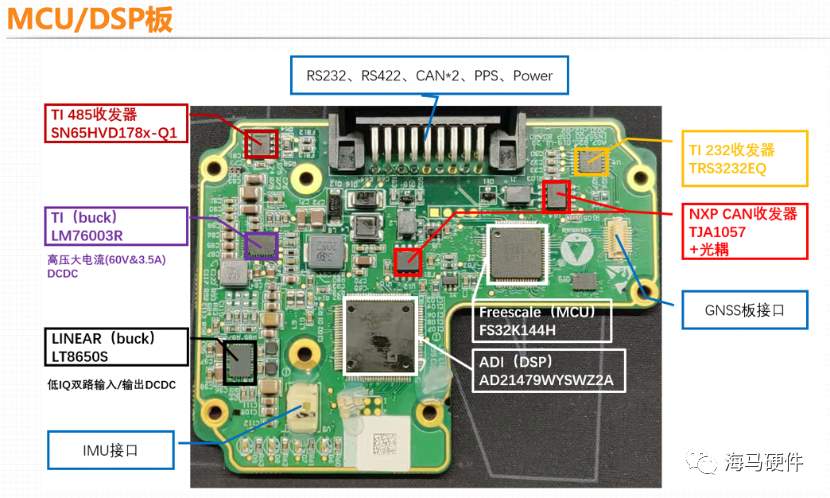
四 主控核心板拆解
主控核心板正面,主芯片由DSP和MCU構(gòu)成,DSP負(fù)責(zé)組合導(dǎo)航算法,MCU負(fù)責(zé)整車通訊和控制,RS232、RS422、CAN接口都有。
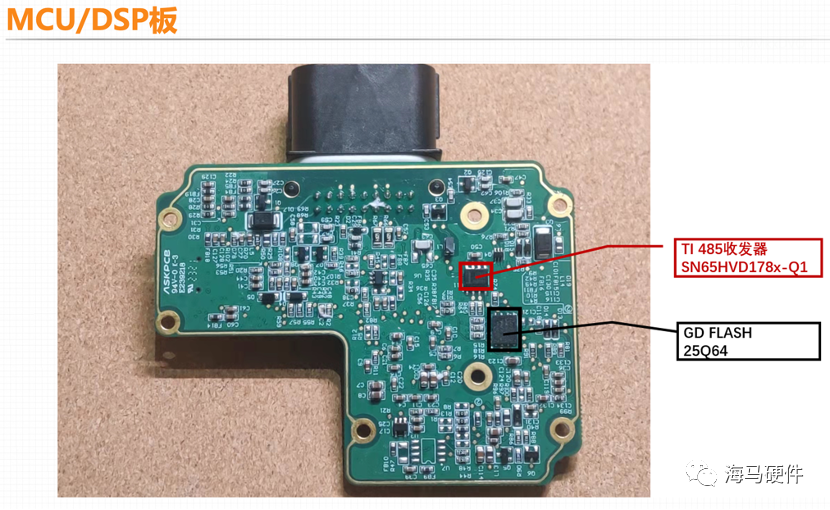
主控核心板背面較為簡單,主要是阻容、二三極管和flash、485驅(qū)動芯片。
五主控核心器件展示
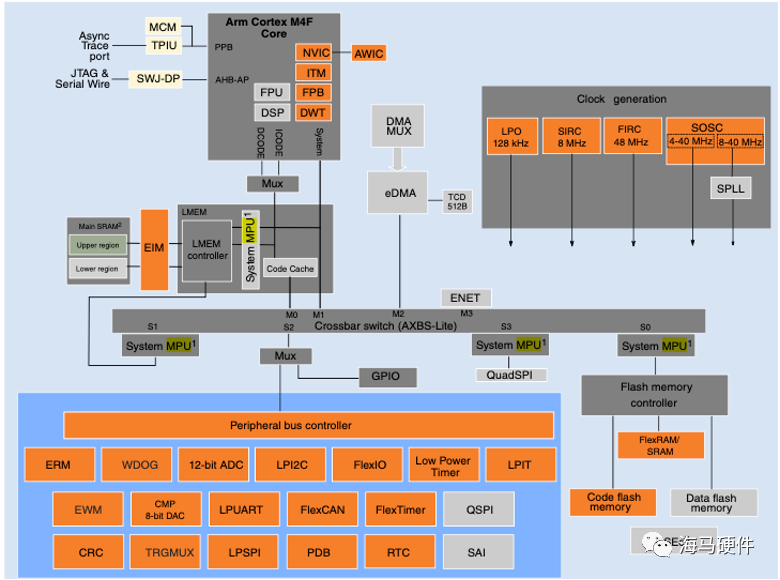
主板MCU主要負(fù)責(zé)IMU數(shù)據(jù)轉(zhuǎn)換、GNSS板數(shù)據(jù)采集、CAN等外設(shè)通信,MCU型號為-FS32K144H,核心參數(shù)和架構(gòu)如下:
Arm Cortex-M4F ,32位
主頻最高112MHz
-45°C~105°C(高速)/125°C(正常模式)
512KB Flash(同系列最高2MB)
64KB RAM(同系列最高256KB)
Armv7結(jié)構(gòu)、集成DSP、FPU
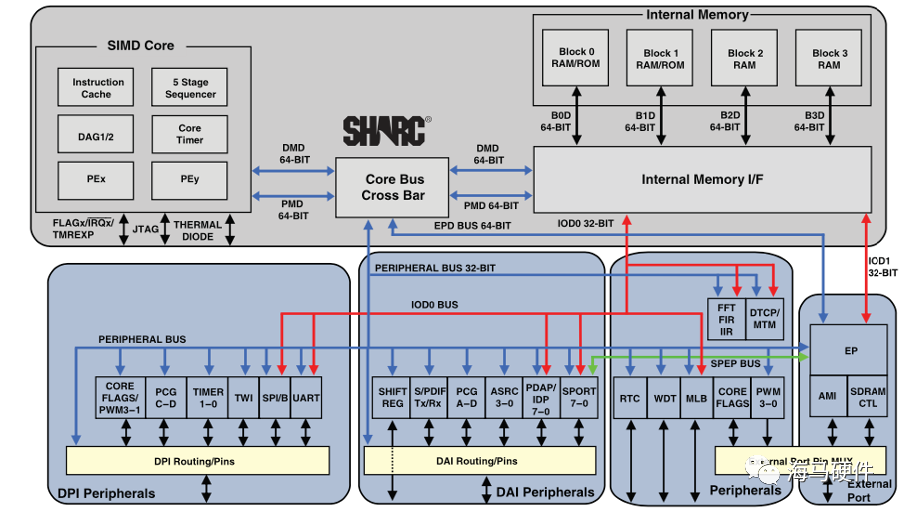
主板DSP主要負(fù)責(zé)組合導(dǎo)航數(shù)據(jù)解算,從硬件架構(gòu)來看可以支持松耦合和緊耦合算法,DSP型號為AD21479WYSWZ2A,核心參數(shù)和架構(gòu)如下
SHARC結(jié)構(gòu)(super harvard architecture)
主頻最高266MHz(同系列最高300MHz)
-45°C~105°C
5Mbit RAM、4Mbit ROM。
FIR、IIR、FFT加速器,矩陣計算、平方根倒數(shù)、乘除加速
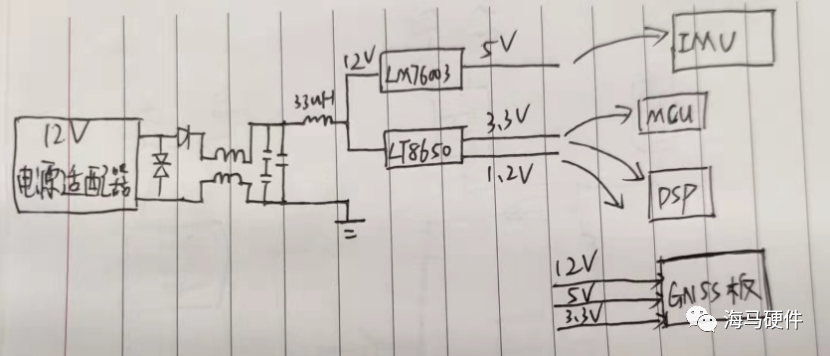
整機(jī)系統(tǒng)電源框圖(純手工打造)
六 蘑菇頭天線拆解
再來看下導(dǎo)遠(yuǎn)D570整套實(shí)驗系統(tǒng)搭配的大蘑菇頭天線。
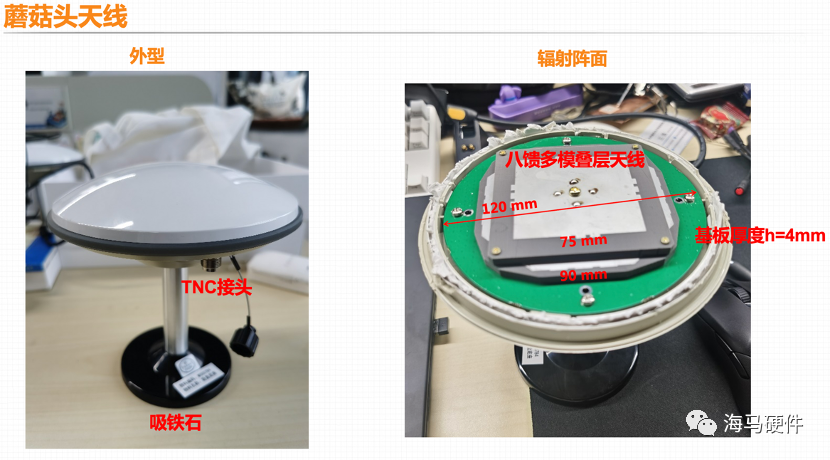
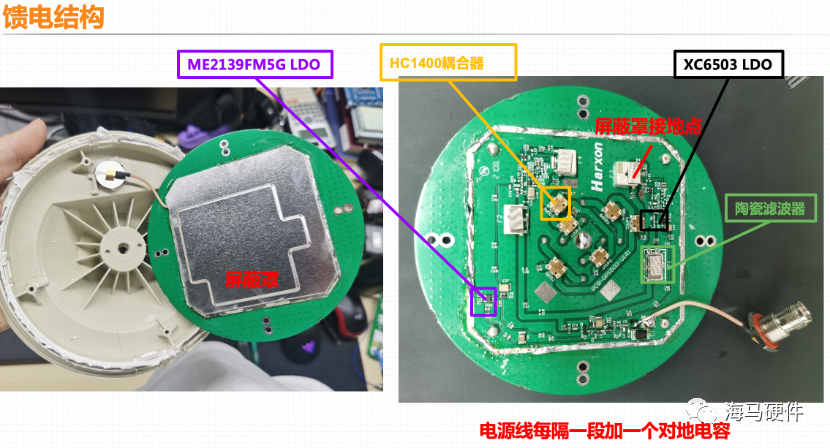
天線底部拆解
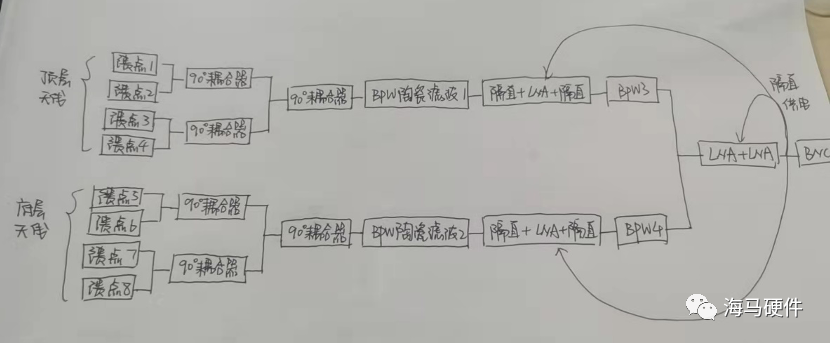
天線設(shè)計框架圖(還是純手工打造)
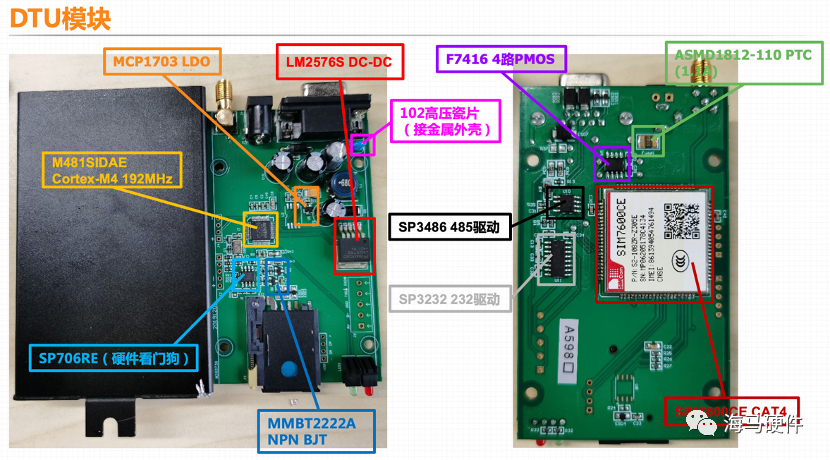
因為支持RTK定位,因此還搭配一個4G DTU上網(wǎng)盒子,這個看起來像是市面上買的成熟產(chǎn)品或者找供應(yīng)商ODM的了,簡單拆解如下:
七總結(jié)
本文通過對導(dǎo)遠(yuǎn)570D自動駕駛高精組合導(dǎo)航設(shè)備的拆解和分析,為我們展示了該設(shè)備的內(nèi)部構(gòu)造和核心技術(shù)參數(shù)。
在拆解過程中,我們詳細(xì)了解了導(dǎo)遠(yuǎn)570D的核心組件,包括獨(dú)立的IMU模塊、主控底板、GNSS板和核心處理板。通過拆解主控板上的MCU和DSP的技術(shù)規(guī)格和功能,揭示了它們在處理IMU數(shù)據(jù)轉(zhuǎn)換、GNSS數(shù)據(jù)采集以及執(zhí)行復(fù)雜的組合導(dǎo)航算法中的核心作用。同時,我們還了解了配套的大蘑菇頭天線和4G DTU上網(wǎng)盒子,它們在整個系統(tǒng)中提供了重要的通信和定位功能。
通過本次拆解,不僅讓我們更近一步地了解了導(dǎo)遠(yuǎn)570D的內(nèi)部結(jié)構(gòu),也為我們展示了高精組合導(dǎo)航設(shè)備的技術(shù)進(jìn)步和應(yīng)用潛力。隨著自動(輔助)駕駛和智能交通系統(tǒng)的快速發(fā)展,可以預(yù)見,高精組合導(dǎo)航技術(shù)將在未來發(fā)揮越來越重要的作用。
注:本文材料主要來自JJC和Brain Bo,特此感謝。
-
傳感器
+關(guān)注
關(guān)注
2550文章
51035瀏覽量
753080 -
智能交通系統(tǒng)
+關(guān)注
關(guān)注
0文章
41瀏覽量
12140 -
導(dǎo)航設(shè)備
+關(guān)注
關(guān)注
0文章
12瀏覽量
8211 -
自動駕駛
+關(guān)注
關(guān)注
784文章
13784瀏覽量
166392
原文標(biāo)題:自動駕駛高精組合導(dǎo)航設(shè)備拆解-導(dǎo)遠(yuǎn)570D
文章出處:【微信號:海馬硬件,微信公眾號:海馬硬件】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
自動駕駛高精組合導(dǎo)航設(shè)備導(dǎo)遠(yuǎn)570D拆解

自動駕駛真的會來嗎?
UWB主動定位系統(tǒng)在自動駕駛中的應(yīng)用實(shí)踐
自動駕駛汽車的定位技術(shù)
自動駕駛系統(tǒng)設(shè)計及應(yīng)用的相關(guān)資料分享
自動駕駛的核心基礎(chǔ)在高精3D地圖
自動駕駛技術(shù)最新進(jìn)展:自動駕駛系統(tǒng)與高精地圖關(guān)系

自動駕駛語義高精地圖的層級實(shí)現(xiàn)
百度高精地圖獲ASPICE認(rèn)證,助力全球自動駕駛發(fā)展
為什么自動駕駛汽車離不開高精地圖
解讀自動駕駛車輛專用高精地圖的魔力
華芯攜手北斗星通共同打造自動駕駛高精定位產(chǎn)品級解決方案
自動駕駛高精定位

國內(nèi)首個L3級自動駕駛之城誕生,高精定位和高精地圖成為關(guān)鍵支撐

自動駕駛仿真測試實(shí)踐:高精地圖仿真






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論