 晶體管級施密特觸發器實用原理解析
晶體管級施密特觸發器實用原理解析
其實像這些基本的電路、比如D觸發器、Schmitt Trigger,MUX等這些電路在PDK中很多工藝都是有的,但是很多情況下我們需要自己設計有某些功能的電路,所以庫里的單元就不合適了。
比如D觸發器,這個是大學數電里面再基礎不過的電路,讓你不看書自己搭一個D觸發器,相信很多同學也是做不到的,這個需要慢慢磨練。D觸發器雖然算是數字電路,但是在我們模擬IC工程師做電路來說,D觸發器是經常使用的。
對于施密特觸發器,在模擬IC也是有很多應用,我在工作中就用到了,也做了很多仿真。今天來給大家從晶體管級詳細分析一下施密特觸發器,以后你們用到了可以來我這里看看。
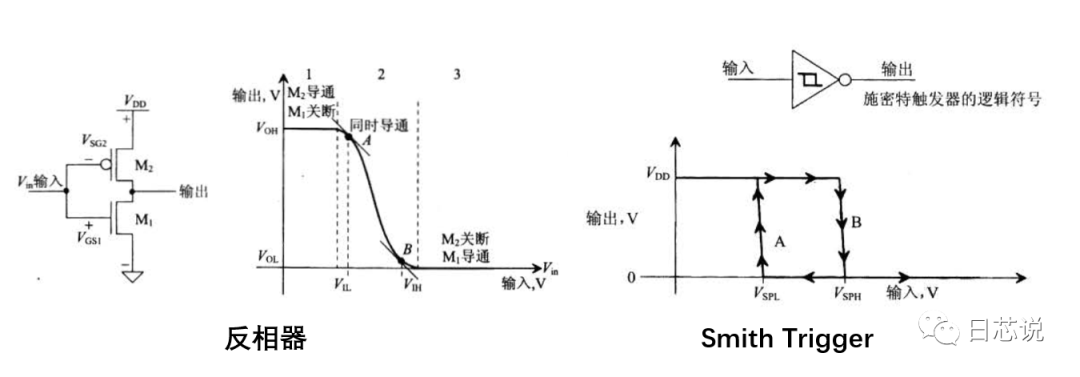
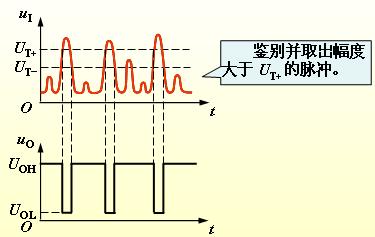
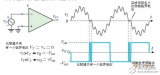
在數電一書中,施密特觸發器歸為脈沖整形電路,當施密特觸發器用作脈沖整形的時候,一般是在有振蕩波形的電路中,當輸出振蕩波形有噪聲的時候,施密特觸發器最重要的特點是能夠把變化緩慢的輸入信號整形成邊沿陡峭的矩形脈沖。同時,施密特觸發器還可利用其回差電壓來提高電路的抗干擾能力。
Schmitt Trigger和反相器很大的區別就是Schmitt Trigger的上升和下降的翻轉閾值不同,有遲滯,雖然反相器精心設計尺寸也可以有遲滯,但是效果沒有Schmitt Trigger好。遲滯的一個很大好處就是,輸入的噪聲如果在遲滯區間內,那么輸出就不會翻轉。
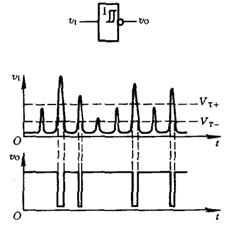
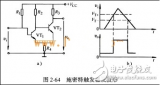
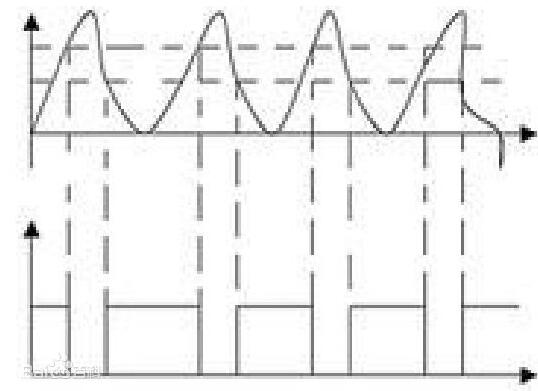
比如,一般比較器只有一個作比較的臨界電壓,若輸入端有噪聲來回多次穿越臨界電壓時,輸出端即受到干擾,其正負狀態產生不正常轉換,如下圖。

如果換做施密特觸發器,由于施密特觸發器的遲滯特性,只要噪聲的大小在兩個臨界電壓(上臨界電壓及下臨界電壓)形成的滯后電壓范圍內,即可避免噪聲誤觸發電路。

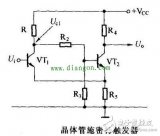
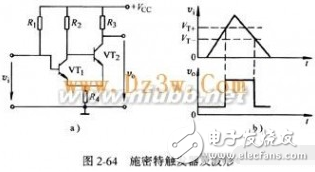
現在我們以常用的施密特觸發器晶體管級電路為例,說明施密特觸發器的工作原理,以及管子的尺寸選取依據,遲滯是如何形成,正反饋怎么形成的。

這是常用施密特觸發器的結構,我們組的電路也是采用這種結構的Schmitt Trigger。遲滯就是利用M6和M3來實現的。當輸出是高電平時,M3導通,M4和M5導通,M6截止,提供了一個VDD到輸出端的通路;當輸出是低電平時,M6導通,M1和M2導通,M3截止,提供了一個輸出端到地的通路。
施密特觸發器有兩個翻轉閾值,輸入由低電平升到高電平,輸出由高電平到低電平轉換,這個閾值叫做正翻轉閾值VT+,輸入由高電平升到低電平,輸出由低電平到高電平轉換,這個閾值叫做負翻轉閾值VT-,二者的差值就是滯回區間。
首先分析輸入進行正轉換的過程。當輸入是0,輸出是高電平時,M1和M2截止,M3導通,A點電壓大小是M3的源端電壓,即VA=VDD-Vth3。當輸入Vin由0到VDD增大,在Vin小于M1的閾值電壓Vth1之前,VA一直是VDD-Vth3,當Vin增加到大于Vth1,M1導通,A點電壓由于M1的導通開始降低,由于M2的源端即A點電壓不是0V,所以M2后于M1導通,這也是遲滯的來源。
當Vin增大直到Vin-VA=Vth2時,M2導通,一旦M2導通,輸出就開始下降,使得M3慢慢關斷,使得A點進一步下降,A點電壓下降,同時輸入Vin增大,使得M2導通的更快,輸出下降的更快,使得M3管關斷的更快,最后M1和M2完全導通,這就是一個正反饋過程,圖中紅圈部分。

定義M2管開始導通的Vin為正翻轉電壓VT+:

當M2導通的瞬間,M1和M3的電流相等,得到:

有同學好奇,你怎么知道M1和M3是飽和區電流而不是線性區,當Vin由0增大,M1導通后肯定是先進入飽和區再是線性區,M3由于漏端是VDD,肯定是飽和區的。
由于M2和M3的源端短接,M2和M3的體端都是地,因此Vth2=Vth3,將(1)代入(2)式,得到:

由于M1的源端和體端短接,因此M1沒有體效應,M2和M3是有體效應的,所以Vth1小于Vth2和Vth3.
按照自己設計指標給定一個VT+,通過(3)得到M1和M3的尺寸比例,M2的尺寸要比M1和M3的尺寸大一些,因為M2是當作一個開關來用,我們希望它在正反饋環路中速度快一些,有利于正反饋。
尺寸比例得到了,至于W和L取多大,要看電路的指標要求了。對于低頻電路,L不需要特別小。對于低功耗電路,W/L不能太大,不然功耗很大。
然后同理分析輸入進行負轉換的過程。當輸入是高電平,輸出是低電平時,M4和M5截止,M6導通,B點電壓大小是M6的源端電壓,即VB=|Vth6|。當輸入Vin由VDD到0增大,在VDD-Vin小于M5的閾值電壓|Vth5|之前,VB一直是|Vth6|,當Vin減小VDD-Vin大于|Vth5|時,M5導通,B點電壓由于M5的導通開始升高,由于M4的源端即B點電壓不是VDD而是小于VDD,所以M4后于M5導通,這也是遲滯的來源。
當Vin減小直到VB-Vin=|Vth4|時,M4導通,一旦M4導通,輸出就開始升高,使得M6慢慢關斷,使得B點進一步升高,B點電壓升高,同時輸入Vin減小,使得M4導通的更快,輸出升高的更快,使得M6管關斷的更快,最后M4和M5完全導通,這就是一個正反饋過程,圖中紅圈部分。

定義M4管開始導通的Vin為負翻轉電壓VT-:

當M4導通的瞬間,M5和M6的電流相等,得到:

加入M4、M5和M6的體端都接VDD,M4和M6的源端短接,那么M4和M6體效應相等,故|Vth6|=|Vth4|,將(4)代入(5)式,得到:

按照自己設計指標給定一個VT-,通過(6)得到M5和M6的尺寸比例,M4的尺寸要比M5和M6的尺寸大一些,因為M4是當作一個開關來用,我們希望它在正反饋環路中速度快一些,有利于正反饋。
以上就完整說明了正負翻轉閾值電壓的設計原理以及各個管子的尺寸設計依據,根據電路要求自己給定VT+和VT-來設計管子尺寸,通過改變管子尺寸來得到不同的VT+和VT-。
-
反相器
+關注
關注
6文章
311瀏覽量
43363 -
比較器
+關注
關注
14文章
1652瀏覽量
107256 -
晶體管
+關注
關注
77文章
9701瀏覽量
138374 -
施密特觸發器
+關注
關注
3文章
235瀏覽量
25910 -
VDD
+關注
關注
1文章
312瀏覽量
33268
發布評論請先 登錄
相關推薦
施密特觸發器,施密特觸發器是什么意思
施密特觸發器的作用_施密特觸發器的典型應用
圖文結合淺析晶體管施密特觸發器電路原理
施密特觸發器電路及工作原理詳解_施密特觸發器特點_施密特觸發器的作用
施密特觸發器的特點_施密特觸發器作用
施密特觸發器芯片有哪些_施密特觸發器的特點及作用





 工商網監
工商網監
評論