 關于歐盟智能網聯汽車型式批準框架進展研究
關于歐盟智能網聯汽車型式批準框架進展研究
摘要
全球在加強智能網聯汽車行業監管的立法和標準化方面,持續開展積極實踐和穩步探索。在UNECE(聯合國歐洲經濟委員會)技術法規層面,已建立L3自動駕駛法規(UN R157自動車道保持系統),并基于L3法規框架,重點針對組合駕駛輔助(L2),起草新的駕駛員控制輔助系統(DCAS)法規,填補監管空白。在歐盟立法層面,為推動汽車駕駛自動化,歐盟采取漸進式監管方法,逐步建立針對智能網聯汽車L3和L4的新的歐盟型式批準框架。
一、概況
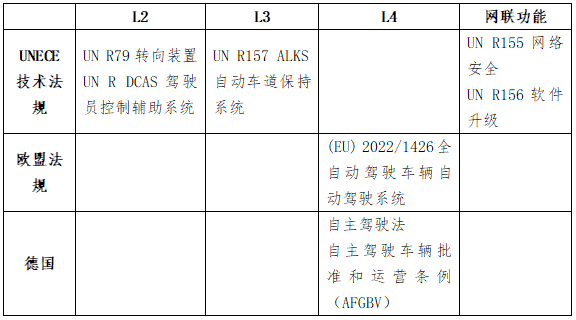
歐盟制定和逐步實施《通用安全法規》(Reg.(EU)2019/2144),以及采納一系列相關的技術或實施法規,引入一系列新的安全功能和駕駛輔助措施,以協助駕駛員并更好地保護乘客和弱勢道路使用者,旨在解決車輛和道路安全需求。其間,歐盟發布自動化移動戰略,為部署網聯和自動化移動系統而采取的一整套行動,包括部署關鍵技術和基礎設施、參加聯合國技術法規研究、建立正確的歐盟內部市場監管框架。 歐盟通常將聯合國UNECE技術法規直接納入其車輛安全立法,方法是在其車輛型式批準法規中插入對它們的引用。在歐盟立法層面,為推動汽車駕駛自動化,歐盟采取漸進式監管方法,基于一系列試點探索,積極與業界合作與協商,逐步建立針對智能網聯汽車L3和L4的新的歐盟型式批準框架。UNECE、歐盟關于L3和L4自動駕駛法規規定了自動駕駛汽車獲得車輛型式批準所需的技術安全要求和驗證要求。此外,德國等歐盟成員國保留對管理其實際使用的許多條件的控制,包括運營批準、機動車登記等。歐盟計劃通過相關立法,允許自動駕駛汽車在歐洲道路上行駛,將有助于增加公眾信任,促進創新并提高歐洲汽車工業的競爭力。表1 車輛駕駛自動化型式批準主要技術法規
二、歐盟建立智能網聯汽車型式批準框架
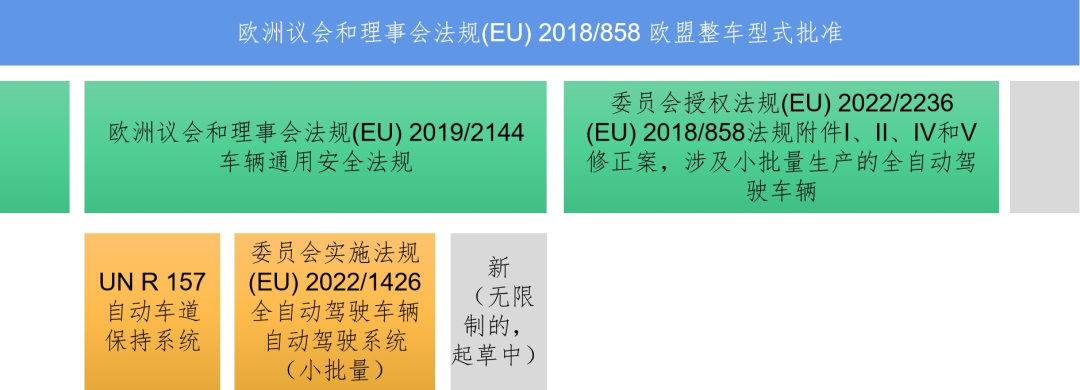
智能網聯汽車有可能為減少道路死亡人數做出巨大貢獻,據估計,超過90%的道路事故是由某種程度的人為錯誤造成的。由于自動駕駛汽車將逐漸接管駕駛員的任務,因此在歐盟層面采用統一的規則和技術要求,同時尊重技術中立原則,并在UNECE/WP.29的框架內在國際層面推廣。《通用安全法規》(Reg.(EU) 2019/2144)及其技術和實施法規,為歐盟的有條件自動駕駛和高度自動駕駛汽車(含全自動駕駛汽車)制定了法規框架,從技術成熟度、數據記錄、網絡安全措施等方面進行規范,以確保此類車輛在投放市場之前是安全的且技術足夠成熟,從而為歐盟自動駕駛汽車鋪平道路。新的型式批準框架中,L3自動駕駛汽車安全法規采用聯合國技術法規,具體為UN R157自動車道保持系統,涵蓋高速公路低速應用的自動車道保持系統的型式批準,修訂后包括變道和高速。歐盟采用新的全自動駕駛技術立法(L4),即歐盟委員會實施法規(EU) 2022/1426《全自動駕駛車輛自動駕駛系統(ADS)型式批準的統一程序和技術規范》,這是同類中的第一個國際規則。特別關注取代高速公路駕駛員的自動駕駛汽車(L3)和全自動駕駛汽車(L4)。通過授權和實施法規制定的技術規則,將在全自動汽車投放歐盟市場之前對其安全性和成熟度進行全面評估,內容涵蓋測試程序、網絡安全要求、數據記錄規則、汽車制造商對安全性能和事故的監測和報告要求等。表2 歐盟智能網聯汽車型式批準框架
 ?
?專欄一 歐盟關于自動駕駛汽車型式批準管理框架
1、歐洲議會和歐盟理事會法規(EU) 2018/858:從作用和內容來看,國內與之對應的是準入管理,作用上與《道路機動車輛生產準入許可管理條例(征求意見稿)》一致。
2、歐洲議會和歐盟理事會法規(EU) 2019/2144:主要是在各種安全(safety)相關項上細化了管理要求和技術法規(國內對應稱之為強制性國家標準——納入產品準入審查要求的)。其引用的技術標準和自動駕駛相關的主要是:
(1)L3自動駕駛系統:UN R157;
(2)L4自動駕駛系統:歐盟委員會實施條例(EU) 2022/1426,適用于小批量;
(3)正在起草中的,適用量產車上搭載的L4自動駕駛系統的新技術法規。
3、歐盟委員會實施法規(EU) 2022/1426:全稱《全自動駕駛車輛自動駕駛系統(ADS)型式批準的統一程序和技術規范》,主要是如何批準搭載于小批量全自動駕駛汽車上的L4自動駕駛系統,包括行車功能(driving)和泊車功能(parking)。
4、歐盟委員會授權法規(EU) 2022/2236:全稱《(EU) 2018/858法規附件I、II、IV和V修正案,涉及無限系列生產的車輛、小批量生產的車輛、小批量生產的全自動車輛和專用車輛的技術要求,以及軟件更新》,主要是對858的修訂,集中于整車型式批準管理上的修訂:
(1)與安全(safety)相關的法規改成2144,具體技術法規引用在2144中體現,簡化了流程,確保了在法規實施框架方面的統一。
(2)針對搭載L4自動駕駛系統進行了車輛類型上的擴大,從只適用于M1和N1,擴大到搭載L4自動駕駛系統的M2、M3、N2、N3也可以申請“歐盟小批量”型式批準模式。
(3)正式把UN R156引入到了歐盟型式批準中,進入到了858 COP的相關要求中。
此外,UNECE GRVA工作組FRAV(自動駕駛和自主車輛的功能要求)和VMAD(自動駕駛驗證方法)正在分別制定《ADS安全驗證監管要求和可驗證標準指南》《自動駕駛全新評估和測試方法(NATM)》,旨在為ADS安全要求、測試與評估提供指導。
三、L3自動駕駛汽車安全法規:采用聯合國法規
對L3自動駕駛汽車,歐盟將采用聯合國法規——自動車道保持系統(R157,ALKS),涵蓋高速公路低速應用的自動車道保持系統(ALKS)的型式批準,車輛在高速公路上以全自動模式運行。ALKS法規初始版本(00系)于2020年發布,2021年1月22日生效,最初的應用僅適用于乘用車,允許ALKS模式的最高速度為60km/h(37英里),特別適用于擁堵情況;2021年,該法規擴展到卡車和長途客車等重型車輛;2022年再次修訂(01系),適用于時速高達130km/h(80英里)的ALKS系統,可以變道。 R157法規包括系統安全和故障安全響應要求、人機交互、網絡安全和軟件升級、自動駕駛數據記錄系統等規定。除了具體的安全要求外,R157法規還包括系統驗證和測試的要求,其中,仿真工具和數學模型可用于驗證安全概念,特別是對于難以在測試場地或真實駕駛條件下表示的場景。制造商必須證明仿真工具的范圍、它們對相關場景的有效性以及對仿真工具鏈進行的驗證(結果與物理測試的相關性)。與此同時,為了應對自動化和數字化快速增長的部署,ALKS還必須遵守R155網絡安全、R156軟件升級法規要求,該法規與R157同日生效。這兩項法規不僅在投放市場時必須滿足,而且在整個車輛生命周期中都必須滿足。依據R157法規,2021年12月,德國聯邦汽車運輸管理局(KBA)批準梅賽德斯-奔馳面向S與EQS系列的ALKS系統。
四、L4自動駕駛車輛安全法規:歐盟和德國實踐
關于SAE L4自動駕駛型式批準法規,目前UNECE尚未制定技術法規對其提出要求。這一監管空白促使歐盟率先獨立制定自己的規則,針對SAE L4車輛型式批準的法律法規已在歐盟和德國生效。
(一)歐盟委員會實施法規(EU)2022/1426
歐盟委員會實施法規(EU)2022/1426《關于配備自動駕駛系統(ADS)的全自動駕駛車輛型式批準的統一程序和技術規范》,規定了歐盟通用安全法規(EU)2019/2144適用于高度自動駕駛車輛自動駕駛系統(ADS)型式批準的應用規則,用于對ADS進行型式批準,于2022年8月5日頒布,并于2022年9月15日生效。這里的重點是制造商需要向型式批準機構提交附件規定的必要信息和文件,以及計劃的在用監測和報告(in-service monitoring and report)。 歐盟委員會通過授權和實施法案制定的技術規則,在全自動駕駛車輛(L4)進入歐盟市場之前,“對它們的安全性和成熟度進行全面評估”。特別是,歐盟法規規定了制造商必須遵守的必要技術要求,以獲得歐盟對L4自動駕駛轎車、客車、卡車的“型式批準”。這些可能是限定范圍內運輸乘客或貨物的自動駕駛車輛,僅在固定起點和終點之間運行的自動穿梭車,或“自動代客泊車”,駕駛員可以將車輛留在下車區,然后車輛自行操控到可用的停車位。 如果L4自動駕駛汽車符合歐盟法規的所有相關條件,則成員國授予的型式批準將允許車輛在整個歐盟銷售。然而,鑒于允許全自動駕駛車輛上路的潛在安全影響,型式批準限制為小批量,即在整個歐盟范圍內每個車型每年只能銷售不超過1500輛,每個成員國每個車型只能銷售不超過250輛。這一限制將在兩年后進行審查,因為委員會表示將繼續努力,在2024年7月之前進一步制定和通過歐盟“無限系列”全自動駕駛車輛整車型式批準的必要要求。歐盟也可能在UNECE的任何相關審議中根據自己的法規制定L4車輛的國際法規。專欄二 (EU)2022/1426簡介
(EU) 2022/1426法規適用于M類和N類全自動駕駛車輛的型式批準,涉及以下應用的自動駕駛系統:
“自動駕駛班車”,設計和制造的全自動駕駛車輛,包括具有雙駕駛模式的車輛,在指定區域內運輸乘客或貨物。
“樞紐到樞紐”運輸,涵蓋全自動駕駛車輛或雙模式車輛,設計和制造用于沿固定路線、固定行程起點和終點運輸乘客或貨物。
“自動代客泊車”,具有全自動駕駛模式的雙駕駛模式車輛,可在預定義的停車設施中進行停車應用。如果適用的話,系統可以使用停車設施的外部基礎設施(例如,位置標記、感知傳感器)來執行動態駕駛任務。
制造商可以根據本法規對法規(EU)2018/858第2(3)條定義的車輛的自動駕駛系統申請單獨批準或型式批準,前提是這些車輛符合本法規的要求。
除上述范圍和具體定義外,該法規還規定了全自動駕駛汽車自動駕駛系統型式批準所需的管理規定和技術規范。
該法規的附件I提供了模型文檔,用于根據ADS描述全自動駕駛車輛。附件二規定了正常和緊急操作以及故障情況下的性能要求、最小風險策略和最小風險狀態、人機交互、功能和操作安全、網絡安全
和軟件更新、事件數據存儲、手動駕駛模式、操作手動和定期技術監測。附件III包括要考慮的交通場景及其推導、ADS的行為能力、制造商安全概念和安全管理體系的評估、要執行的測試和模擬仿真測試工具以及車輛運行期間的措施。
“雙駕駛模式車輛”是指專門設計和制造了駕駛員座椅、由駕駛員在“手動駕駛模式”下駕駛以及由ADS在無人監管的“全自動駕駛模式”下由司機駕駛的全自動駕駛車輛。
(二)德國《自主駕駛法》和《自主駕駛汽車批準和運營條例》
2017年6月21日,德國公布《道路交通法》(StGV)第八修訂案,允許具備高度自動駕駛或完全自動駕駛功能(highly or fully automated driving function)的車輛在公共道路上測試、運營。2021年7月28日,德國公布針對自主駕駛功能的《〈道路交通法〉和〈強制保險法〉的修訂案-自主駕駛法》(GAF)公布,使得在公共道路交通中自主駕駛的車輛能夠測試、運營。相應的《自主駕駛汽車批準和運營條例》(AFGBV)于2022年6月30日公布,進而建立了適用于特定運行區域的自主駕駛(L4)國家法律框架,其中規定了自主駕駛汽車的必要技術要求,限定運行區域的批準,以及獲得自主駕駛汽車運營許可證的程序。與歐盟(EU) 2022/1426型式批準法規相比,GAF和AFGBV明確了在限定運行區域批準、道路機動車登記等方面的監管要求。1、自主駕駛法 《自主駕駛法》是針對具有全自動駕駛功能的客車和貨車的法規,將使SAE L4自主駕駛汽車能夠獲得德國的型式批準和運營許可。因此,不需要單獨的許可、例外和要求,例如隨時準備進行干預的安全駕駛員的存在。《自主駕駛法》是在國際層面出臺統一法規之前的臨時解決方案。同時,BMDV也在積極參與制定歐盟和UNECE層面的法規框架。設想的部署場景包括A點到B點的穿梭交通、人員運輸(在固定路線上行駛的公交)、Hub2Hub運輸(如兩個配送中心之間)、非高峰時段以需求為導向的服務、第一英里或最后一英里的人員和/或貨物運輸、“雙模式車輛”(如自動代客泊車AVP)。列舉的場景表明,該法律主要解決在限定的運行區域內使用自主駕駛車輛的移動和運輸服務(MaaS/TaaS)。2、自主駕駛汽車批準和運營條例 為實現L4自主(無人駕駛)人員運輸和貨物運輸的商業化,自主駕駛汽車須經過該條例規定的三個步驟的批準程序。一是由KBA根據L4車輛的技術要求頒發型式批準。自主駕駛汽車需要制造商從德國聯邦汽車運輸管理局(KBA)獲得型式批準。該條例明確許可的程序框架、技術要求。制造商的申請需要提交詳細的文件,例如關于符合技術要求的聲明以及提供有關安全概念,并基于多支柱方法(審查和評估、模擬仿真、實際道路駕駛)驗證履行情況。制造商還需要記錄測試場景目錄,涵蓋測試參數和運行過程中可能對車輛產生的環境影響。在獲得型式批準后,后續對車輛進行的修改需要獲得KBA的許可。二是由根據國家法律負責的區域機構對限定設計運行范圍(ODD,在地理上限制于指定環境)進行第二步批準。三是根據步驟一和步驟二的批準,以及符合要求的機動車責任保險,進行L4車輛的登記發牌。(三)德國和歐盟法規之間的主要異同 隨著GAF/AFGBV、實施法規(EU)2022/1426的生效,德國和歐盟允許符合SAE L4的自動駕駛申請型式批準。GAF和AFGBV明確旨在作為過渡解決方案,直到國際層面出現統一的法規。最初的應用預計將在復雜性較低的運行區域進行。因此,問題是國家法規是否或在何種程度上可能因法規(EU) 2022/1426而變得多余。共同點:GAF/AFGBV、實施條例(EU)2022/1426的應用案例幾乎相同。國家和歐洲法規都可以通過模擬仿真來測試是否滿足要求,模擬工具將通過實際測試進行驗證。傳感器技術在物體檢測和分類方面的性能,需要通過實際測試中的模擬來確定,可以使用測試工具(軟碰撞目標、移動平臺、假人行人)。法規(EU) 2022/1426要求制造商證明全自動車輛在其整個使用壽命期間不會對限定運行區域內的車輛乘員和其他道路使用者造成不合理的安全風險。差異點:與法規(EU) 2022/1426不同,GAF和AFGBV不限于M類和N類車輛。此外,歐盟法規不涵蓋ODD特定測試,ODD特定測試僅屬于國家/地方級別的管轄范圍,GAF和AFGBV還包含有關測試和隨后激活自動或自主駕駛功能的法規。實際上,對于不屬于M類和N類的車輛,例如L類的所謂LED輕型車輛,以及自動或自主駕駛功能的測試或后續激活,目前只有國家法規可以被應用。在所有其他情況下,申請人可以自行決定是否按照歐洲法律或國家法律進行。AFGBV還要求對限定運行區域進行單獨的批準。
五、L2組合駕駛輔助:正在制定新的聯合國技術法規
駕駛員控制輔助系統(Driver Control Assistance System,DCAS),可通過持續的橫向和縱向運動控制支持協助人類駕駛員執行車輛動態控制,是高級駕駛輔助系統(ADAS)的子集。考慮到不同增強型DCAS向市場的擴展,UNECE制定關于持續縱向+橫向控制的新法規——DCAS法規,旨在針對批準配備DCAS的車輛建立技術中立的統一和通用性規定,為任何ADAS提供最低安全要求,允許批準各種駕駛員控制輔助系統(法規適用于M類和N類車輛的DCAS型式批準),填補現有的監管空白。
監管目標:DCAS致力于防止駕駛員誤用或濫用的合理可預見風險。法規草案提出,應確保系統在其設計使用條件下提供穩定的控制;系統設有保障措施,保證駕駛員隨時準備干預。因此,DCAS應提供足夠的信息以使駕駛員能夠監督所提供的幫助。DCAS將監測駕駛員(確保雙手放在方向盤上或眼睛注視道路,甚至兩者兼而有之),評估駕駛員的參與度,并通過向駕駛員發出明確的警告來對駕駛員缺乏參與度做出適當的反應。如果駕駛員沒有對系統的警告做出反應并且沒有采取必要的控制措施,它將使車輛完全停止。與NATM類似,DCAS法規中實施“多支柱”技術來評估DCAS。“多支柱”評估技術彌補了未直接評估的與DCAS運行用例相關的不確定性,從而覆蓋了對DCAS多個運行用例的評估。制造商需要聲明系統設計概要,這有助于向型式批準機構通報需要進行的必要評估和驗證活動。考慮到DCAS中集成的功能和集成到車輛中的整個DCAS的功能和運行安全性,DCAS的驗證應確保制造商在設計和開發過程中進行了全面評估。評估支柱包括通過加強對制造商文件的審查、模擬仿真測試、封閉場地和公共道路測試,以及制造商對DCAS運行的在用監測和報告來驗證DCAS安全。DCAS的可用性及其協助能力受到限定的系統運行邊界的限制,不同的需求適用于不同類型的DCAS功能,這應該通過測試用例來體現。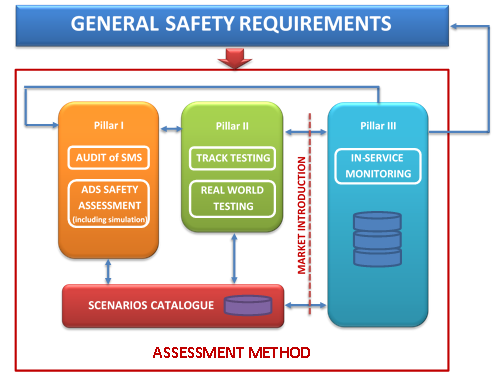
引入駕駛員控制輔助系統(DCAS),適用于橫向和縱向運動控制輔助的任意組合的性能要求,而UN R79重點關注轉向系統。相比于UN R79體系針對每一項功能都規定了細化的技術要求和性能指標,DCAS法規弱化性能指標的限制,采用更全面的合規性評估方法,與FRAV/VMAD中關于ADS通用要求/評估的討論保持一致,由型式批準機構通過審查和評估、實車試驗等驗證方式對產品法規符合性進行確認。
專欄三 組合駕駛輔助系統型式批準法規框架
在2023年4月13日召開的GRVA/TF ADAS19次會議上,歐盟委員會提出應分階段制定DCAS法規的提案,分階段規劃如下:
Phase 1,2023年9月GRVA審議:限定在L2 Hands-on,加速完善目前已在草案中有的功能項,例如自動換道、非結構化道路下的撥桿換道等;
Phase 2,2024年9月GRVA審議:考慮擴展在phase 1法規中沒有包含的功能(待進一步討論)。
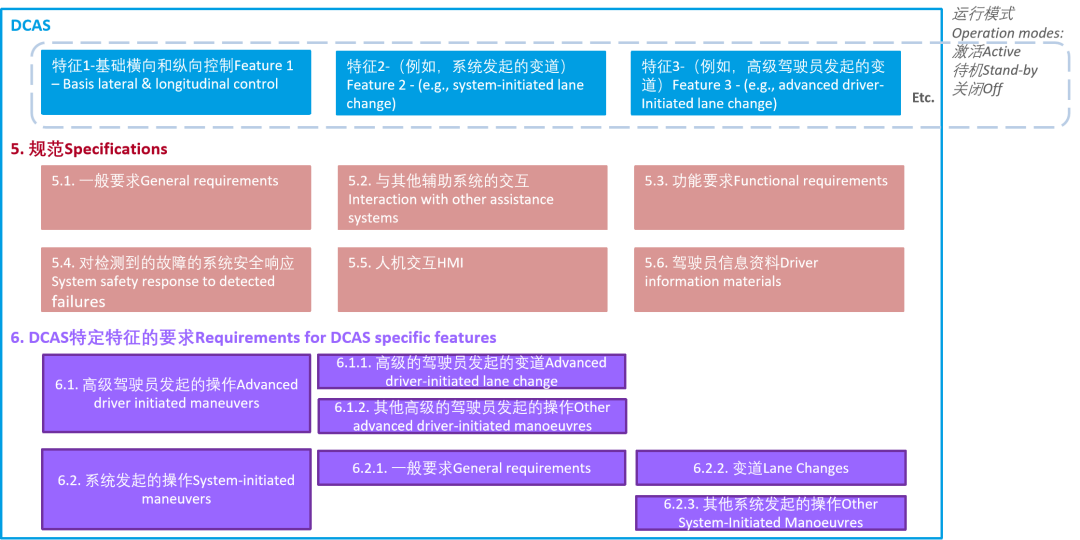
圖1 DCAS法規草案主要內容框架(來源:17th GRVA)
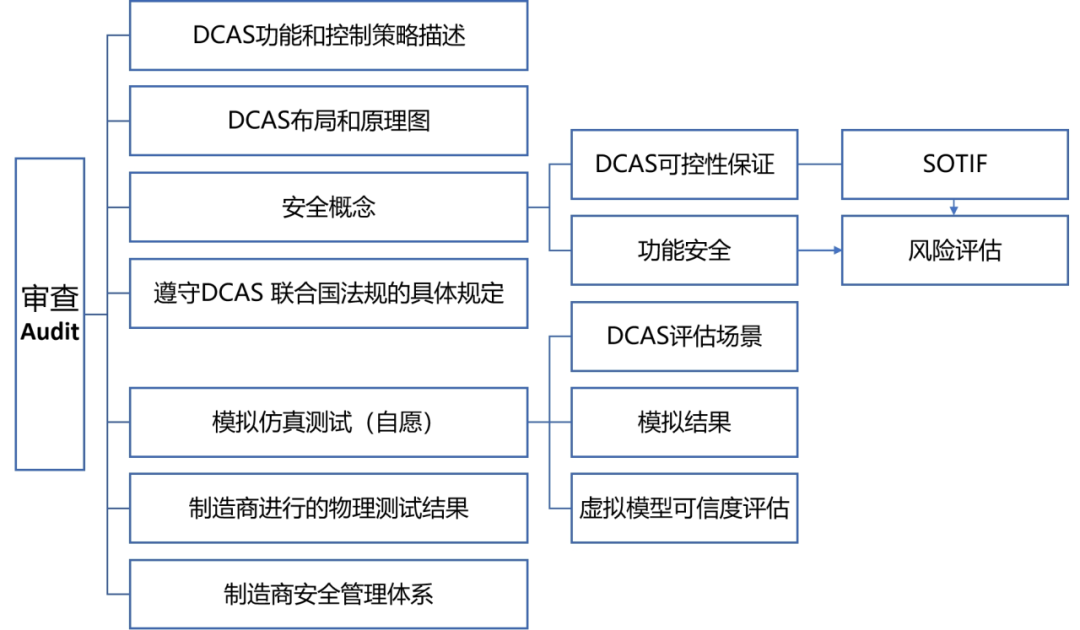
圖2 DCAS驗證-評估支柱:審查
六、總結
(一)在智能網聯汽車型式批準技術法規的探索和實踐中,對搭載駕駛員輔助控制系統或高級別自動駕駛系統的智能網聯汽車,均建立安全框架要求和“多支柱”技術安全驗證和評估方法,內容涵蓋企業安全管理體系、產品技術要求、過程保障和測試安全驗證、安全監測和報告等要求,以驗證智能網聯汽車系統安全和安全性能。
(二)在“多支柱”安全驗證框架中,模擬仿真作為基本方法發揮著重要作用。R157法規、(EU)2022/1426法規DCAS(草案)等規定仿真工具和數學模型可用于驗證安全概念,特別是對于難以在測試場地或真實駕駛條件下表示的場景;制造商必須證明仿真工具的范圍、對相關場景的有效性,以及模型建模與仿真工具鏈置信度的評價框架等。 (三)開展實證是加快智能網聯汽車安全驗證、形成安全基準的重要途徑。歐盟通過一系列智能網聯汽車測試驗證與安全評估等試點項目,同時采取同業界合作與協商的方法,為持續開展監管框架實踐和探索提供有力支撐。
參考文獻
[1]European Scrutiny Committee. EU regulations for "self-driving" vehicles: potential implications for the UK. Date Published: 17 January 2023
[2]Uniform provisions concerning the approval of vehicles with regard to Automated Lane Keeping Systems. UN Regulation No. 157. Date of entry into force as an annex to the 1958 Agreement: 22 January 2021
[3]Uniform provisions concerning the approval of vehicles with regard to Dynamic Control Assistance Systems. UN Regulation No. Xxx. 17th GRVA, 22-27 September 2023
[4]New Assessment/Test Method for Automated Driving (NATM) Guidelines for Validating Automated Driving System (ADS). 6 April 2023
[5]Draft UN Regulation on DCAS - Outline. Submitted by the TF on ADAS leadership. 17thGRAV, 25-29 September 2023
[6]歐洲議會和歐盟理事會法規(EU) 2018/858關于機動車輛及其拖車以及用于此類車輛的系統、組件和單獨技術單元的批準和市場監督
[7]歐洲議會和歐盟理事會法規(EU) 2019/2144關于機動車輛及其拖車以及用于此類車輛的系統、部件和單獨技術單元的型式批準要求,涉及其一般安全以及對車輛乘員和弱勢道路使用者的保護
[8]歐盟委員會實施法規(EU) 2022/1426全自動駕駛車輛自動駕駛系統(ADS)型式批準的統一程序和技術規范
[9]歐盟委員會授權法規(EU) 2022/2236 (EU) 2018/858法規附件I、II、IV和V修正案,涉及無限系列生產的車輛、小批量生產的車輛、小批量生產的全自動車輛和專用車輛的技術要求,以及軟件更新
[10]Udo Steininger,Legal Issues of Automated Driving. Publication date: 15thDecember 2022
[11]General Safety Regulation – Secondary Legislation. Updated: 29thAugust 2022
[12]NEW RULES ON VEHICLE SAFETY AND AUTOMATED MOBILITY. Document date: 5thJuly 2022
[13]德國《道路交通法》(StVG)
[14]德國《〈道路交通法〉和〈強制保險法〉修訂案——自主駕駛法》(GAF)
[15]德國《在限定運行區域內批準和運營具有自主駕駛功能的機動車條例》(《自主駕駛汽車批準和運營條例》)(AFGBV)
掃描二維碼
關注賽目科技
 ?
?專注智能網聯汽車
測試丨驗證丨評價研究
原文標題:關于歐盟智能網聯汽車型式批準框架進展研究
文章出處:【微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
-
賽目科技
+關注
關注
0文章
39瀏覽量
650
原文標題:關于歐盟智能網聯汽車型式批準框架進展研究
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

北斗智聯探討汽車智能網聯技術趨勢
智能網聯汽車仿真測試標準體系研究


瑞士電信收購沃達豐意大利公司獲歐盟批準





 工商網監
工商網監
評論