") 凌華科技SuperCAT運動控制器在錫膏印刷機上有何應(yīng)用?
凌華科技SuperCAT運動控制器在錫膏印刷機上有何應(yīng)用?
應(yīng)用背景
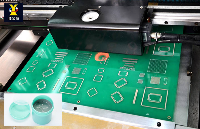
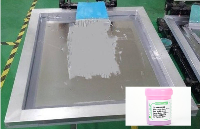
高精密PCB錫膏印刷機采用涂布技術(shù),通過壓力和鍍膜刮刀來控制錫膏的厚度和形狀。操作流程主要包括:板上定位、錫膏供料、錫膏印刷、印刷檢測和清潔,最終完成一個PCB電路板的制作。早期的設(shè)備都采用脈沖卡的方式實現(xiàn)精準的運動控制,隨著設(shè)備功能的不斷升級和精度的不斷提高,越來越多的客戶在開發(fā)新設(shè)備的時候會考慮采用軟件控制器平臺的方式,這樣一方面可以使功能升級變得更加容易,另一方面也有助于設(shè)備的整體后續(xù)維護的成本降低。
SuperCAT產(chǎn)品概述
SuperCAT是凌華科技打造的基于軟件控制的EtherCAT運動控制器,其核心的控制軟件來自于凌華二十多年運動控制經(jīng)驗的積累,整合了凌華脈沖卡和EtherCAT總線卡的所有功能,系統(tǒng)通訊周期相比硬件的EtherCAT總線卡得到了大幅提升,同時可以滿足更多軸數(shù)的應(yīng)用需求。
SuperCAT產(chǎn)品特性:
? 具備EtherCAT主站功能
? 運動控制周期高達125us
? 最多支持128軸運動控制
? 最低 API 延遲<10us
? APS SDK 支援
? 支持開發(fā)語法 C#, .NET, C/C++, Python, Java…etc
? 支援多任務(wù)與實時程序運行
錫膏印刷機功能需求:
1) 軸運動控制以點位運動和兩軸插補功能為主。
2) 需要在高速運行狀態(tài)下實現(xiàn)2D觸發(fā),用于視覺定位和飛拍應(yīng)用,通過軟件觸發(fā)的方式在高速運行狀態(tài)下無法滿足設(shè)備的需求。
SuperCAT解決方案:
該設(shè)備的核心運動控制單元采用SuperCAT主控軟件,搭配凌華ECAT-TRG4模塊,實現(xiàn)了多應(yīng)用接口的擴展以及高速2D位置比較觸發(fā)功能,用于替代傳統(tǒng)的脈沖控制解決方案,該組合不僅幫助用戶提升了設(shè)備的產(chǎn)能,同時也為后續(xù)新產(chǎn)品的開發(fā)選定了新的開發(fā)平臺。
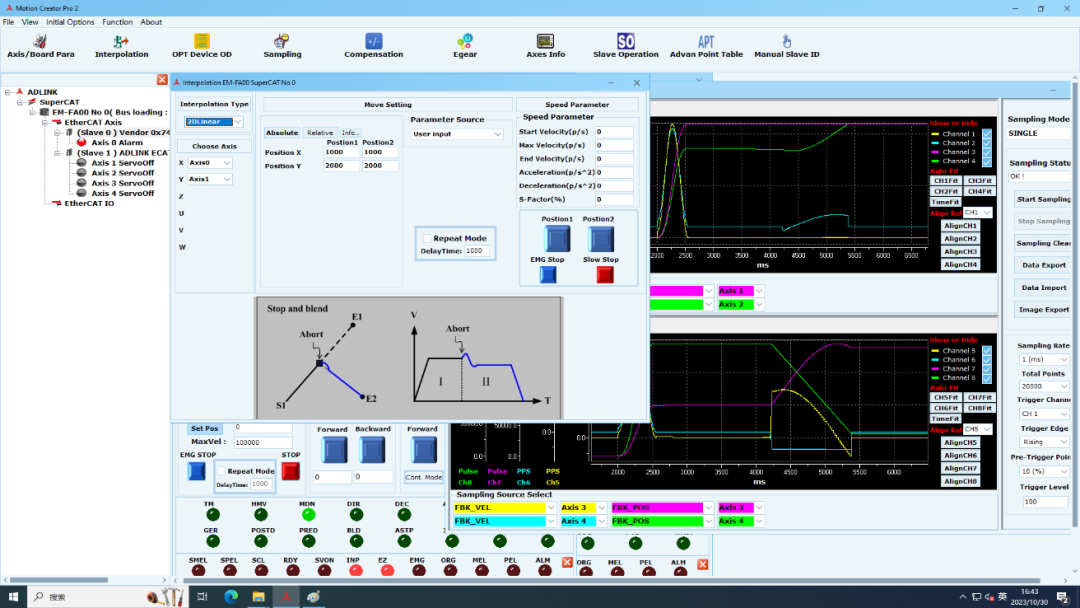
1) 兩軸插補中用到的函數(shù)和語法如下,
APS_pt_motion_add_point
Syntax: C/C++:
I32 APS_pt_motion_add_point ( I32 Axis_ID, I32 ArraySize, F64 *PositionArray, F64 *TimeArray ); Visual Basic: APS_pt_motion_add_point(ByVal Axis_ID As Long, ByVal ArraySizeAs Long, PositionArrayAs Double, TimeArrayAs Double) As Long
APS_pt_motion_get_status
Syntax: C/C++:
I32 APS_pt_motion_get_status( I32 Axis_ID, I32 *FreeSize, I32 *PointCount, I32 *State ); Visual Basic: APS_pt_motion_get_status (ByVal Axis_ID As Long, FreeSize As Long, PointCountAs Long, StateAs Long) As Long
APS_pt_motion_start
Syntax: C/C++:
I32 APS_pt_motion_start (I32 Dimension, I32 *Axis_ID_Array, I32 Enable ); Visual Basic: APS_pt_motion_start(ByVal Dimension As Long, Axis_ID_Array As Long, ByVal Enable As Long) As Long
APS_pt_motion_reset
Syntax: C/C++:
I32 APS_pt_motion_reset (I32 Axis_ID); Visual Basic: APS_pt_motion_reset (ByVal Axis_ID As Long) As Long
調(diào)試界面如下,
2)2D觸發(fā)功能
2D觸發(fā)功能通過外接ECAT-TRG4 4通道高速位置比較和觸發(fā)模塊實現(xiàn),ECAT-TRG4 是 EtherCAT從端模塊,具有高速位置比較觸發(fā)和編碼器單個信號中繼功能,該模塊的規(guī)格如下,
? 4 通道點表觸發(fā)-最大10 MHz帶FIFO 255 點
? 4 通道線性觸發(fā) - 最大10MHz
? 4 通道位置鎖存 - 最大3 MHz帶 255 點
? 硬件緊急停止接口
? 通過主站最多支持 32 組龍門功能
? 軸參數(shù)的斷電記憶
? 支持編碼器信號中繼功能
? 支持高級點表
需要用到的函數(shù)和語法如下,
APS_set_field_bus_multi_trigger_table
Syntax:
C/C++:
I32 APS_set_field_bus_multi_trigger_table( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 Dimension, MCMP_POINT *DataArray, I32 ArraySize , I32 Window );
APS_get_field_bus_multi_trigger_table_cmp
Syntax:
C/C++:
I32 APS_get_field_bus_multi_trigger_table_cmp( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 Dimension, MCMP_POINT *CmpVal );
APS_get_field_bus_multi_table_cmp_remain_count
Syntax:
C/C++:
I32 APS_get_field_bus_multi_table_cmp_remain_count( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 *Cnt );
凌華科技EtherCAT一站式解決方案:
凌華科技為智能制造用戶提供一站式解決方案,實現(xiàn)生產(chǎn)設(shè)備之間的互聯(lián)互通,全面共享和交互內(nèi)部數(shù)據(jù),從而優(yōu)化生產(chǎn)流程,更好地應(yīng)對市場需求的變化。
用戶可通過PC端的編程環(huán)境,在單個硬件平臺上實現(xiàn)應(yīng)用程序的集中控制,從而降低成本,提高系統(tǒng)可靠性和安全性。
凌華科技是邊緣計算解決方案的全球領(lǐng)導(dǎo)廠商,解決方案包括加固級模塊與系統(tǒng)、實時數(shù)據(jù)采集解決方案,以及實現(xiàn)人工智能+物聯(lián)網(wǎng)(AIoT)的應(yīng)用等。凌華科技是Intel Internet of Things Solutions Alliance優(yōu)選會員(Premier Member),NVIDIA全球伙伴,并積極參與多項國際技術(shù)標準,包括Open Compute Project (OCP)、Object Management Group (OMG)和ROS 2技術(shù)指導(dǎo)委員會(Technical Steering Committee; TSC)。
審核編輯:劉清
-
pcb
+關(guān)注
關(guān)注
4322文章
23124瀏覽量
398510 -
運動控制器
+關(guān)注
關(guān)注
2文章
405瀏覽量
24758 -
印刷機
+關(guān)注
關(guān)注
2文章
74瀏覽量
16715 -
EtherCAT總線
+關(guān)注
關(guān)注
5文章
72瀏覽量
5434
原文標題:凌華科技SuperCAT運動控制器在錫膏印刷機上的應(yīng)用
文章出處:【微信號:凌華科技,微信公眾號:凌華科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
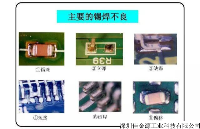
錫膏印刷時錫膏塌陷是怎么造成的?

PCBA加工中如何控制好錫膏印刷?
錫膏印刷與回流焊空洞的區(qū)別有哪些?

SMT貼片工藝中錫膏印刷的關(guān)鍵細節(jié)及優(yōu)化策略

SMT貼片工藝中錫膏印刷的關(guān)鍵細節(jié)及優(yōu)化策略
錫膏印刷機遠程監(jiān)控物聯(lián)網(wǎng)系統(tǒng)解決方案

錫膏印刷機物聯(lián)網(wǎng)監(jiān)控運維管理系統(tǒng)方案
SMT加工中常見的錫膏印刷質(zhì)量問題有哪些?
詳解錫膏印刷對回流焊接的影響
基于機器視覺的SMT全自動錫膏印刷技術(shù)深度研究

常見的影響錫膏印刷質(zhì)量的因素有哪些?

SMT貼片加工廠如何控制錫膏印刷質(zhì)量?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論