 力觸覺感知系統的工作原理
力觸覺感知系統的工作原理
力觸覺感知系統在機器人操作中具有非常重要的作用。它可以檢測機器人末端執行器與工件相互作用時產生的三維力/力矩和接觸信息。
這些信息對于機器人來說是極其重要的,它們可以提供關于環境、操作和自身狀態的詳細信息,幫助機器人做出更精確和安全的操作。
具體來說,力觸覺感知系統的工作原理如下:首先,安裝在機器人末端執行器上的力/力矩傳感器會實時檢測到與工件的相互作用力。
這些力信號將被轉換為電信號,然后通過數據傳輸到機器人的控制系統。
在控制系統內,這些電信號會被進一步處理和分析,以生成有關機器人操作的各種信息。這些信息可以包括工件的形狀、大小、硬度等,以及機器人末端執行器的姿態、位置等。
這些信息對于機器人來說是極其重要的,它們可以幫助機器人更好地適應環境,做出更精確的操作。
關節扭矩傳感器的基本原理是應變測量。當機器人關節運動時,扭矩傳感器會感受到由機器人關節施加在傳感器上的力矩,這會導致傳感器發生微小的形變。
扭矩傳感器通過測量這種形變來確定扭矩的大小。
在機器人關節中,扭矩的傳遞通過齒輪、軸承和其他傳動部件實現。
傳感器通常被安裝在這些傳動部件中的一個上,以便測量扭矩。其中一種常見的傳感器類型是應變片傳感器。
機器人關節力控制系統主要通過對機器人的每個關節進行控制,實現機器人的運動控制、定位以及精確度的保持。一般來說,機器人關節力控制系統主要由伺服驅動器、編碼器、控制器等組成。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753076 -
機器人
+關注
關注
211文章
28380瀏覽量
206916 -
感知系統
+關注
關注
1文章
70瀏覽量
15940
發布評論請先 登錄
相關推薦
介紹幾種觸覺傳感器的工作原理 PZT觸覺傳感器的研究進展和制作工藝
人體皮膚通過與物體表面的接觸,對物體的粗糙度、硬度、導熱性、溫度、濕度、銳利性、振動、觸覺力、觸覺壓力等物理性能的進行綜合反應。
紋理觸覺信息檢測系統研究
本文利用PVDF(聚偏二氟乙烯)薄膜的壓電效應和其獨特物理性質,設計了一種高精度、高分辨率、高速響應的具有紋理觸覺感知作用的傳感器;然后,模擬人體感知紋理觸覺信息
發表于 12-26 11:47
?19次下載
基于振動觸覺的便攜式環境信息感知器
本項目利用雙目攝像頭、加速度傳感器,陀螺儀和振動致動器構建了一個基于振動觸覺的便攜式環境信息感知系統。該系統由攝像頭圖像獲取模塊、運動檢測模塊、中央處理模塊以及振
發表于 12-02 14:31
?48次下載

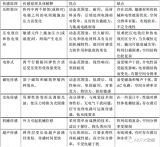
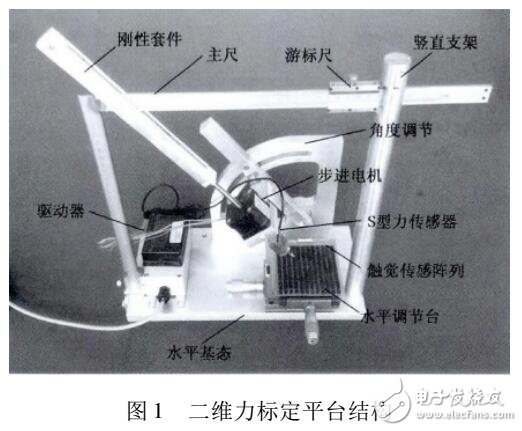
一種柔性觸覺傳感陣列力覺標定
電子仿生皮膚在輔助智能機器人感知外界環境信息、實現人機交互等方面具有重要的作用。具備柔性、可穿戴特點的觸覺傳感器成為當今電子仿生皮膚的發展趨勢之一,并在醫療康復州、工業生產等領域中得到廣泛應用。為
發表于 01-19 14:28
?0次下載
基于傳感器及觸覺研究的尖端前沿圖像系統設計
關鍵詞:觸覺 , 傳感器 , 圖像系統 你曾經玩過一種當你偏離賽道時手柄發出震動警示的電視賽車游戲嗎?如果玩過,你便已經對觸覺界面有了感觀的認識。觸覺這個詞來自希臘語haptikos,
發表于 03-29 15:08
?318次閱讀
元宇宙怎么感知觸覺
元宇宙怎么感知觸覺?今年元宇宙爆火,元宇宙幾乎成了人們討論的家常,建立元宇宙,從感知現實開始。元宇宙離不開3D觸覺技術的支持,Facebook近日推出了一款適用于機器人和可穿戴設備的“
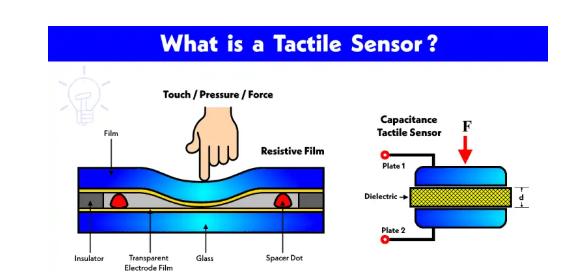
什么是觸覺傳感器?觸覺傳感器如何工作?
觸覺傳感器是我們在日常活動中最常用的。許多日常活動,如手機觸摸屏、生物識別安全系統、壓力測量、力測量、機器人等等都使用這種傳感器。
發表于 08-29 14:44
?3527次閱讀
基于視覺的多模態觸覺感知系統
傳統的多模態/多任務觸覺感知系統通過集成多種傳感單元來達到多模態觸覺信息的解耦,但其往往導致系統結構的復雜性,以及需要應對來自不同刺激間的干
發表于 10-18 11:24
?900次閱讀

智能駕駛系統的工作原理
智能駕駛系統的工作原理主要基于傳感器技術、通信技術、人工智能算法以及計算機程序的綜合運用。以下是智能駕駛系統工作原理的介紹: 一、感知





 工商網監
工商網監
評論