") 基于全階模型磁鏈觀測器的異步電機(jī)矢量控制
基于全階模型磁鏈觀測器的異步電機(jī)矢量控制
導(dǎo)讀:異步電機(jī)直接矢量控制需要通過磁鏈觀測器來獲取同步角,用于控制過程中的坐標(biāo)變換。同時(shí),磁鏈觀測器輸出的估計(jì)磁鏈用于磁鏈PI調(diào)節(jié)器閉環(huán)控制。所以磁鏈觀測器在矢量控制中顯得尤為重要。
一、矢量控制FOC
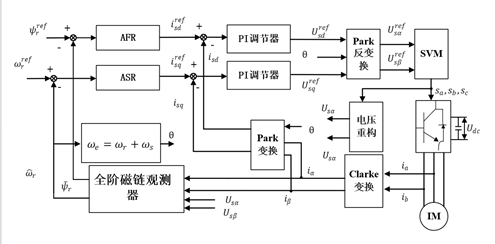
圖1-1 異步電機(jī)轉(zhuǎn)子磁場定向矢量控制框圖
二、全階磁鏈觀測器
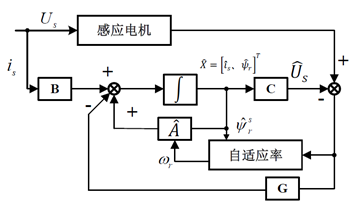
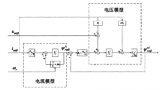
圖2-1全階磁鏈觀測器系統(tǒng)結(jié)構(gòu)框圖
全階磁鏈觀測器的主要思想是將感應(yīng)電機(jī)模型作為參考,把狀態(tài)估計(jì)的方程作為可調(diào)節(jié)部分。這兩部分具有相同物理意義的輸出量,利用兩個(gè)部分的輸出量誤差再經(jīng)過反饋校正通道對狀態(tài)觀測值進(jìn)行修正,使觀測值快速地跟蹤上實(shí)際值。模型參考自適應(yīng)系統(tǒng)的(Model Reference Adaptive System,MRAS)思想有效地提高了全階磁鏈觀測器的動(dòng)態(tài)性能和抗擾動(dòng)性能。
參考異步電機(jī)狀態(tài)方程,全階磁鏈觀測器模型可以表示為:

三、仿真建模與波形分析
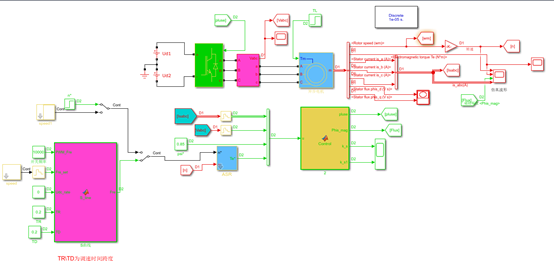
圖3-1 基于全階模型磁鏈觀測器的FOC控制仿真系統(tǒng)
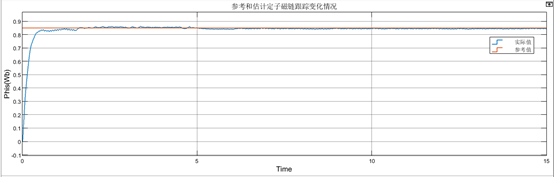
(a)150r/min
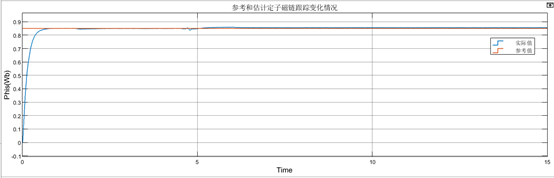
(b)1500r/min
圖3-2 不同轉(zhuǎn)速下的估計(jì)磁鏈變換情況
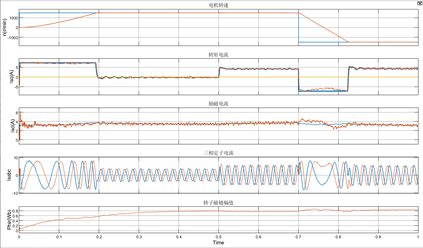
圖3-3 基于全階模型磁鏈觀測器的異步電機(jī)FOC控制系統(tǒng)仿真波形(1500r/min)
從圖(3-1)和(3-2)可知,全階磁鏈觀測器在低速和高速區(qū)域,實(shí)際值都能很好地跟蹤上參考值。
四、總結(jié)
全階磁鏈觀測器屬于一種閉環(huán)磁鏈觀測器,根據(jù)MRAS進(jìn)行誤差反饋修正估計(jì)值,動(dòng)態(tài)和穩(wěn)態(tài)性能有所提高。全階磁鏈觀測器的重點(diǎn)在于離散化方法和反饋矩陣的設(shè)計(jì),可以保證在全速范圍內(nèi)具有一定的磁鏈估計(jì)精度。
審核編輯:劉清
-
異步電機(jī)
+關(guān)注
關(guān)注
6文章
427瀏覽量
32845 -
矢量控制
+關(guān)注
關(guān)注
2文章
284瀏覽量
32210 -
PI調(diào)節(jié)器
+關(guān)注
關(guān)注
1文章
21瀏覽量
8338 -
FOC控制
+關(guān)注
關(guān)注
0文章
43瀏覽量
2785
原文標(biāo)題:基于全階模型磁鏈觀測器的異步電機(jī)矢量控制的學(xué)習(xí)
文章出處:【微信號:淺談電機(jī)控制,微信公眾號:淺談電機(jī)控制】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
異步電機(jī)的無速度傳感矢量控制設(shè)計(jì)
基于二階廣義積分器的永磁同步電機(jī)定子磁鏈觀測方法
異步電機(jī)無感控制中,觀測器在觀測磁鏈時(shí)需要用到轉(zhuǎn)速信息,而在速度估計(jì)時(shí)有需要用到磁鏈的信息,這樣不矛盾嗎?
基于電壓型磁鏈觀測器的異步電機(jī)矢量控制學(xué)習(xí)
交流異步電機(jī)矢量控制之simulink仿真搭建

異步電機(jī)控制筆記
基于電壓型磁鏈觀測器的異步電機(jī)矢量控制學(xué)習(xí)
基于電流型磁鏈觀測器的異步電機(jī)矢量控制學(xué)習(xí)
異步電機(jī)速度估計(jì)-混合模型磁鏈觀測器法
異步電機(jī)的改進(jìn)型電壓模型磁鏈觀測器介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論