 力控機器人控制方法的框架及其性能分析
力控機器人控制方法的框架及其性能分析
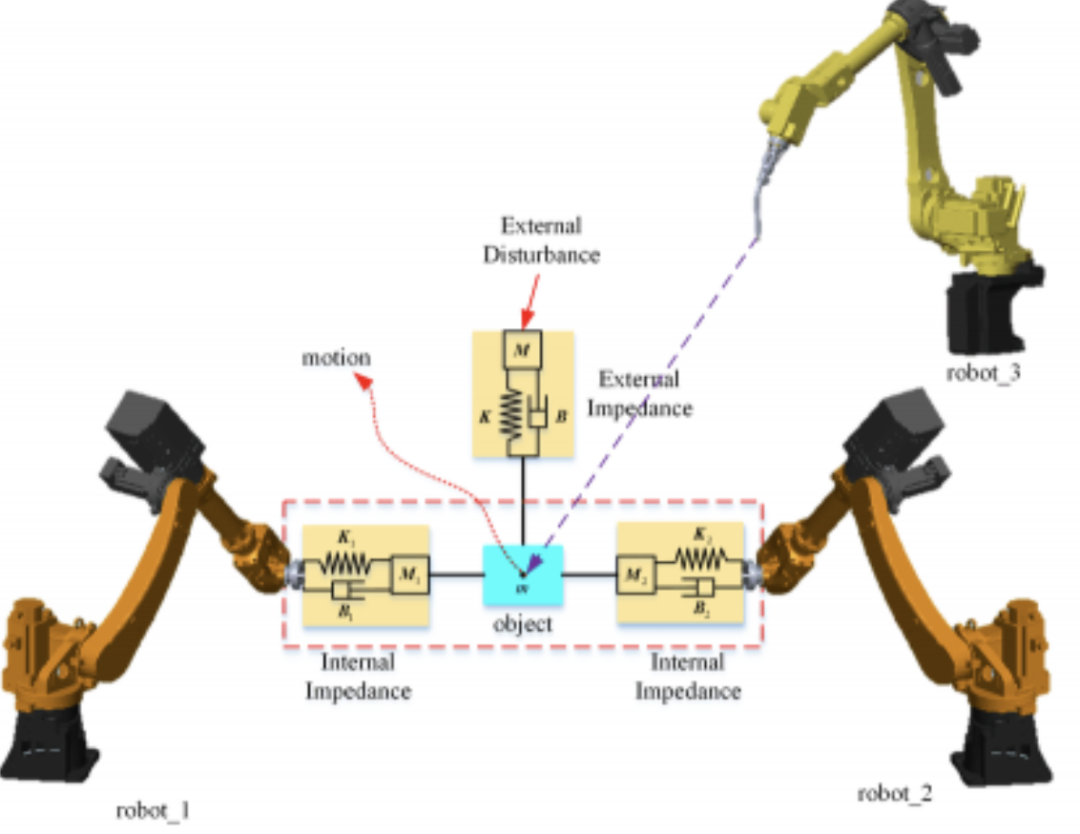
力控機器人常采用柔順控制算法與人/環境/機器人之間進行直接或間接的物理交互,那么,柔順控制能夠操縱被控系統的柔性特性和動態行為,實現方式可以分為被動柔順和主動柔順,具體分類如下圖所示:

力控機器人交互控制框架是用于實現機器人與外部環境或操作者之間的力互動的控制系統。
在力控機器人交互控制中,主要涉及直接力控制、阻抗控制和導納控制三種主要方法。下面是這些控制方法的框架及其性能分析:
1. 直接力控制框架:
力/力矩傳感器:用于測量機器人與環境之間的力和力矩。
力/力矩控制器:根據傳感器測量值和期望的力/力矩指令,生成控制指令以實現期望的力互動。
運動控制器:用于控制機器人的關節或末端執行器,以實現所需的運動軌跡。
環境建模與識別:用于對環境進行感知和識別,以幫助機器人適應環境變化。

性能分析:
?力跟蹤性能:評估力控制器的能力,以實現期望的力跟蹤。
?運動軌跡跟蹤性能:評估運動控制器的能力,以實現期望的運動軌跡跟蹤。
?動態響應性能:評估系統對外部力變化的響應速度和穩定性。
?力/位置誤差分析:分析力控制和位置控制之間的誤差,以評估系統的精度和穩定性。
?穩定性分析:通過線性穩定性分析或Lyapunov穩定性分析等方法,評估力控制系統的穩定性。
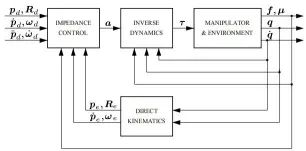
2. 阻抗控制框架:
力/力矩傳感器:用于測量機器人與環境之間的力和力矩。
阻抗控制器:根據傳感器測量值和期望的力/力矩指令,生成控制指令以實現期望的阻抗互動。
運動控制器:用于控制機器人的關節或末端執行器,以實現所需的運動軌跡。
環境建模與識別:用于對環境進行感知和識別,以幫助機器人適應環境變化。
性能分析:
?阻抗響應性能:評估阻抗控制器對外部力變化的響應速度和穩定性。
?阻抗參數分析:分析阻抗控制器中的參數對系統性能的影響,如阻尼、剛度和質量等參數。
?阻抗穩定性分析:評估阻抗控制系統的穩定性,包括阻抗穩定性邊界和阻抗參數的穩定性范圍。
?動態性能分析:分析阻抗控制器對不同頻率的外部力變化的動態響應性能。
?阻抗控制精度分析:評估阻抗控制器在實現期望的阻抗響應時的精度和穩定性。
以下為阻抗控制簡單實現的MATLAB程序:
% 定義阻抗控制參數
M = 5;
B = 10;
K = 20;
% 定義初始位置和速度
x = 0;
xdot = 0;
% 定義時間步長和仿真時間
dt = 0.01;
T = 5;
% 初始化位置和速度數組
x_arr = zeros(1, T/dt);
xdot_arr = zeros(1, T/dt);
% 進行阻抗控制仿真
for i = 1:T/dt
% 計算外部力
F_ext = 10 * sin(i*dt);
% 計算加速度
xddot = (F_ext - B*xdot - K*x) / M;
% 更新位置和速度
xdot = xdot + xddot*dt;
x = x + xdot*dt;
% 存儲位置和速度
x_arr(i) = x;
xdot_arr(i) = xdot;
end
% 繪制位置和速度圖像
t = 0:dt:T-dt;
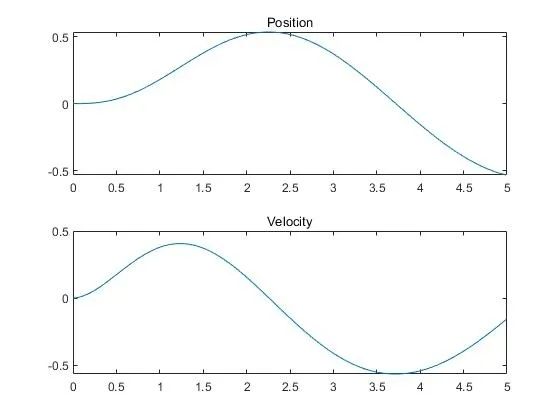
subplot(2,1,1)
plot(t, x_arr)
title('Position')
subplot(2,1,2)
plot(t, xdot_arr)
title('Velocity')
仿真結果如下:
對于二連桿機械臂的阻抗控制,需要考慮機械臂的動力學模型。需要更多的信息來確定機械臂的參數和控制目標:
% 定義阻抗控制參數
Md = diag([5, 5]);
Bd = diag([10, 10]);
Kd = diag([20, 20]);
% 定義機械臂質量和初始位置
m1 = 1;
m2 = 1;
l1 = 1;
l2 = 1;
q = [0; 0];
qdot = [0; 0];
% 定義時間步長和仿真時間
dt = 0.01;
T = 5;
% 初始化位置數組
q_arr = zeros(2, T/dt);
% 進行阻抗控制仿真
for i = 1:T/dt
% 計算外部力矩
tau_ext = [10 * sin(i*dt); 5 * cos(i*dt)];
% 計算關節慣量矩陣
M = [(m1+m2)*l1^2 + m2*l2^2 + 2*m2*l1*l2*cos(q(2)), m2*l2^2 + m2*l1*l2*cos(q(2));
m2*l2^2 + m2*l1*l2*cos(q(2)), m2*l2^2];
% 計算離心力與科氏力矩陣
C = [-m2*l1*l2*sin(q(2))*qdot(2), -m2*l1*l2*sin(q(2))*(qdot(1)+qdot(2));
m2*l1*l2*sin(q(2))*qdot(1), 0];
% 計算重力矩陣
G = [(m1+m2)*l1*9.8*cos(q(1)) + m2*l2*9.8*cos(q(1)+q(2));
m2*l2*9.8*cos(q(1)+q(2))];
% 計算期望加速度
qddot_d = Md (tau_ext - Bd*qdot - Kd*q);
% 計算控制力矩
tau = M*qddot_d + C*qdot + G - Bd*qdot - Kd*q;
% 更新位置和速度
qddot = M (tau + tau_ext - C*qdot - G);
qdot = qdot + qddot * dt;
q = q + qdot * dt;
% 存儲位置
q_arr(:,i) = q;
end
% 繪制位置圖像
t = 0:dt:T-dt;
subplot(211)
plot(t, q_arr(1,:))
title('Joint 1 Position')
subplot(212)
plot(t, q_arr(2,:))
title('Joint 2 Position')
-
傳感器
+關注
關注
2550文章
51035瀏覽量
753081 -
機器人
+關注
關注
211文章
28380瀏覽量
206918 -
測量
+關注
關注
10文章
4849瀏覽量
111241 -
力控
+關注
關注
0文章
22瀏覽量
7858
發布評論請先 登錄
相關推薦
工業機器人的基本結構
【機器人在線】工業噴涂機器人誤差修正方法發展趨勢
機器人、協作機器人和移動機器人,你分的清楚嗎
如何設計智能滅火機器人控制器?
競賽機器人制作技術(電路設計、編程方法、算法解析)
差速移動機器人軌跡跟蹤控制方法
機器人是什么?
盤點工業機器人四種控制方法
力控機器人的控制框架和性能評估
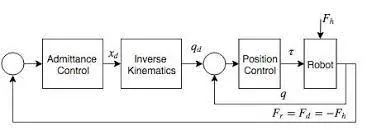
力控機器人導納控制框架





 工商網監
工商網監
評論