 協程的實現與原理
協程的實現與原理
前言
協程這個概念很久了,好多程序員是實現過這個組件的,網上關于協程的文章,博客,論壇都是汗牛充棟,在知乎,github上面也有很多大牛寫了關于協程的心得體會。突發奇想,我也來實現一個這樣的組件,并測試了一下性能。借鑒了很多大牛的思想,閱讀了很多大牛的代碼。于是把整個思考過程寫下來。實現代碼
https://github.com/wangbojing/NtyCotyCo
代碼簡單易讀,如果在你的項目中,NtyCo能夠為你解決些許工程問題,那就榮幸之至。
本文章的設計思路,是在每一個章的最前面以問題提出,每章節的學習目的。大家能夠帶著每章的問題來讀每章節的內容,方便讀者能夠方便的進入每章節的思考。讀者讀完以后加上案例代碼閱讀,編譯,運行,能夠對神秘的協程有一個全新的理解。能夠運用到工程代碼,幫助你更加方便高效的完成工程工作。
第一章 協程的起源
問題:協程存在的原因?協程能夠解決哪些問題?
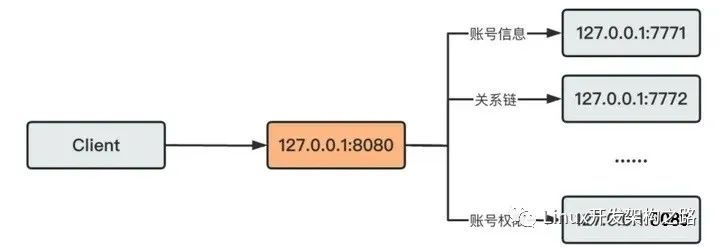
在我們現在CS,BS開發模式下,服務器的吞吐量是一個很重要的參數。其實吞吐量是IO處理時間加上業務處理。為了簡單起見,比如,客戶端與服務器之間是長連接的,客戶端定期給服務器發送心跳包數據。客戶端發送一次心跳包到服務器,服務器更新該新客戶端狀態的。心跳包發送的過程,業務處理時長等于IO讀取(RECV系統調用)加上業務處理(更新客戶狀態)。吞吐量等于1s業務處理次數。
業務處理(更新客戶端狀態)時間,業務不一樣的,處理時間不一樣,我們就不做討論。
那如何提升recv的性能。若只有一個客戶端,recv的性能也沒有必要提升,也不能提升。若在有百萬計的客戶端長連接的情況,我們該如何提升。以Linux為例,在這里需要介紹一個“網紅”就是epoll。服務器使用epoll管理百萬計的客戶端長連接,代碼框架如下:
while (1) {
int nready = epoll_wait(epfd, events, EVENT_SIZE, -1);
for (i = 0;i < nready;i ++) {
int sockfd = events[i].data.fd;
if (sockfd == listenfd) {
int connfd = accept(listenfd, xxx, xxxx);
setnonblock(connfd);
ev.events = EPOLLIN | EPOLLET;
ev.data.fd = connfd;
epoll_ctl(epfd, EPOLL_CTL_ADD, connfd, &ev);
} else {
handle(sockfd);
}
}
}
對于響應式服務器,所有的客戶端的操作驅動都是來源于這個大循環。來源于epoll_wait的反饋結果。
對于服務器處理百萬計的IO。Handle(sockfd)實現方式有兩種。
第一種,handle(sockfd)函數內部對sockfd進行讀寫動作。代碼如下
int handle(int sockfd) {
recv(sockfd, rbuffer, length, 0);
parser_proto(rbuffer, length);
send(sockfd, sbuffer, length, 0);
}
handle的io操作(send,recv)與epoll_wait是在同一個處理流程里面的。這就是IO同步操作。
優點:
- sockfd管理方便。
- 操作邏輯清晰。
缺點:
- 服務器程序依賴epoll_wait的循環響應速度慢。
- 程序性能差
第二種,handle(sockfd)函數內部將sockfd的操作,push到線程池中,代碼如下:
int thread_cb(int sockfd) {
// 此函數是在線程池創建的線程中運行。
// 與handle不在一個線程上下文中運行
recv(sockfd, rbuffer, length, 0);
parser_proto(rbuffer, length);
send(sockfd, sbuffer, length, 0);
}
int handle(int sockfd) {
//此函數在主線程 main_thread 中運行
//在此處之前,確保線程池已經啟動。
push_thread(sockfd, thread_cb); //將sockfd放到其他線程中運行。
}
Handle函數是將sockfd處理方式放到另一個已經其他的線程中運行,如此做法,將io操作(recv,send)與epoll_wait 不在一個處理流程里面,使得io操作(recv,send)與epoll_wait實現解耦。這就叫做IO異步操作。
優點:
- 子模塊好規劃。
- 程序性能高。
缺點:
正因為子模塊好規劃,使得模塊之間的sockfd的管理異常麻煩。每一個子線程都需要管理好sockfd,避免在IO操作的時候,sockfd出現關閉或其他異常。
上文有提到IO同步操作,程序響應慢,IO異步操作,程序響應快。
下面來對比一下IO同步操作與IO異步操作。
代碼如下:
https://github.com/wangbojing/c1000k_test/blob/master/server_mulport_epoll.c
在這份代碼的486行,#if 1, 打開的時候,為IO異步操作。關閉的時候,為IO同步操作。
接下來把我測試接入量的結果粘貼出來。
IO異步操作,每1000個連接接入的服務器響應時間(900ms左右)。
IO同步操作,每1000個連接接入的服務器響應時間(6500ms左右)。
IO異步操作與IO同步操作
對比項
IO同步操作
IO異步操作
Sockfd管理
管理方便
多個線程共同管理
代碼邏輯
程序整體邏輯清晰
子模塊邏輯清晰
程序性能
響應時間長,性能差
響應時間短,性能好
有沒有一種方式,有異步性能,同步的代碼邏輯。來方便編程人員對IO操作的組件呢?有,采用一種輕量級的協程來實現。在每次send或者recv之前進行切換,再由調度器來處理epoll_wait的流程。
就是采用了基于這樣的思考,寫了NtyCo,實現了一個IO異步操作與協程結合的組件。https://https://github.com/wangbojing/NtyCo
第二章 協程的案例
問題:協程如何使用?與線程使用有何區別?
在做網絡IO編程的時候,有一個非常理想的情況,就是每次accept返回的時候,就為新來的客戶端分配一個線程,這樣一個客戶端對應一個線程。就不會有多個線程共用一個sockfd。每請求每線程的方式,并且代碼邏輯非常易讀。但是這只是理想,線程創建代價,調度代價就呵呵了。
先來看一下每請求每線程的代碼如下:
while(1) {
socklen_t len = sizeof(struct sockaddr_in);
int clientfd = accept(sockfd, (struct sockaddr*)&remote, &len);
pthread_t thread_id;
pthread_create(&thread_id, NULL, client_cb, &clientfd);
}
這樣的做法,寫完放到生產環境下面,如果你的老板不打死你,你來找我。我來幫你老板,為民除害。
如果我們有協程,我們就可以這樣實現。參考代碼如下:
https://github.com/wangbojing/NtyCo/blob/master/nty_server_test.c
while (1) {
socklen_t len = sizeof(struct sockaddr_in);
int cli_fd = nty_accept(fd, (struct sockaddr*)&remote, &len);
nty_coroutine *read_co;
nty_coroutine_create(&read_co, server_reader, &cli_fd);
}
這樣的代碼是完全可以放在生成環境下面的。如果你的老板要打死你,你來找我,我幫你把你老板打死,為民除害。
線程的API思維來使用協程,函數調用的性能來測試協程。
NtyCo封裝出來了若干接口,一類是協程本身的,二類是posix的異步封裝
協程API:while
- 協程創建
int nty_coroutine_create(nty_coroutine **new_co, proc_coroutine func, void *arg)
- 協程調度器的運行
void nty_schedule_run(void)
POSIX異步封裝API:
int nty_socket(int domain, int type, int protocol)
int nty_accept(int fd, struct sockaddr *addr, socklen_t *len)
int nty_recv(int fd, void *buf, int length)
int nty_send(int fd, const void *buf, int length)
int nty_close(int fd)
接口格式與POSIX標準的函數定義一致。
第三章 協程的實現之工作流程
問題:協程內部是如何工作呢?
先來看一下協程服務器案例的代碼, 代碼參考:https://github.com/wangbojing/NtyCo/blob/master/nty_server_test.c
分別討論三個協程的比較晦澀的工作流程。第一個協程的創建;第二個IO異步操作;第三個協程子過程回調
3.1 創建協程
當我們需要異步調用的時候,我們會創建一個協程。比如accept返回一個新的sockfd,創建一個客戶端處理的子過程。再比如需要監聽多個端口的時候,創建一個server的子過程,這樣多個端口同時工作的,是符合微服務的架構的。
創建協程的時候,進行了如何的工作?創建API如下:
int nty_coroutine_create(nty_coroutine **new_co, proc_coroutine func, void *arg)
參數1:nty_coroutine **new_co,需要傳入空的協程的對象,這個對象是由內部創建的,并且在函數返回的時候,會返回一個內部創建的協程對象。
參數2:proc_coroutine func,協程的子過程。當協程被調度的時候,就會執行該函數。
參數3:void *arg,需要傳入到新協程中的參數。
協程不存在親屬關系,都是一致的調度關系,接受調度器的調度。調用create API就會創建一個新協程,新協程就會加入到調度器的就緒隊列中。
創建的協程具體步驟會在《協程的實現之原語操作》來描述。
3.2 實現IO異步操作
大部分的朋友會關心IO異步操作如何實現,在send與recv調用的時候,如何實現異步操作的。
先來看一下一段代碼:
while (1) {
int nready = epoll_wait(epfd, events, EVENT_SIZE, -1);
for (i = 0;i < nready;i ++) {
int sockfd = events[i].data.fd;
if (sockfd == listenfd) {
int connfd = accept(listenfd, xxx, xxxx);
setnonblock(connfd);
ev.events = EPOLLIN | EPOLLET;
ev.data.fd = connfd;
epoll_ctl(epfd, EPOLL_CTL_ADD, connfd, &ev);
} else {
epoll_ctl(epfd, EPOLL_CTL_DEL, sockfd, NULL);
recv(sockfd, buffer, length, 0);
//parser_proto(buffer, length);
send(sockfd, buffer, length, 0);
epoll_ctl(epfd, EPOLL_CTL_ADD, sockfd, NULL);
}
}
}
在進行IO操作(recv,send)之前,先執行了 epoll_ctl的del操作,將相應的sockfd從epfd中刪除掉,在執行完IO操作(recv,send)再進行epoll_ctl的add的動作。這段代碼看起來似乎好像沒有什么作用。
如果是在多個上下文中,這樣的做法就很有意義了。能夠保證sockfd只在一個上下文中能夠操作IO的。不會出現在多個上下文同時對一個IO進行操作的。協程的IO異步操作正式是采用此模式進行的。
把單一協程的工作與調度器的工作的劃分清楚,先引入兩個原語操作 resume,yield會在《協程的實現之原語操作》來講解協程所有原語操作的實現,yield就是讓出運行,resume就是恢復運行。調度器與協程的上下文切換如下圖所示
在協程的上下文IO異步操作(nty_recv,nty_send)函數,步驟如下:
- 將sockfd 添加到epoll管理中。
- 進行上下文環境切換,由協程上下文yield到調度器的上下文。
- 調度器獲取下一個協程上下文。Resume新的協程
IO異步操作的上下文切換的時序圖如下:
3.3 回調協程的子過程
在create協程后,何時回調子過程?何種方式回調子過程?
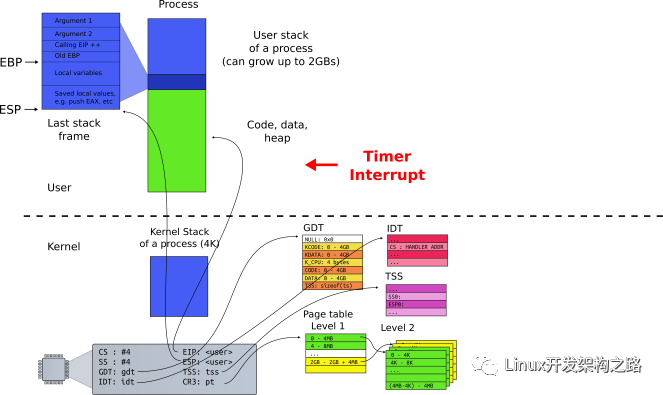
首先來回顧一下x86_64寄存器的相關知識。匯編與寄存器相關知識還會在《協程的實現之切換》繼續深入探討的。x86_64 的寄存器有16個64位寄存器,分別是:%rax, %rbx,
%rcx, %esi, %edi, %rbp, %rsp, %r8, %r9, %r10, %r11, %r12, %r13, %r14, %r15。
%rax 作為函數返回值使用的。
%rsp 棧指針寄存器,指向棧頂
%rdi, %rsi, %rdx, %rcx, %r8, %r9 用作函數參數,依次對應第1參數,第2參數。。。
%rbx, %rbp, %r12, %r13, %r14, %r15 用作數據存儲,遵循調用者使用規則,換句話說,就是隨便用。調用子函數之前要備份它,以防它被修改
%r10, %r11 用作數據存儲,就是使用前要先保存原值
以NtyCo的實現為例,來分析這個過程。CPU有一個非常重要的寄存器叫做EIP,用來存儲CPU運行下一條指令的地址。我們可以把回調函數的地址存儲到EIP中,將相應的參數存儲到相應的參數寄存器中。實現子過程調用的邏輯代碼如下:
void _exec(nty_coroutine *co) {
co- >func(co- >arg); //子過程的回調函數
}
void nty_coroutine_init(nty_coroutine *co) {
//ctx 就是協程的上下文
co- >ctx.edi = (void*)co; //設置參數
co- >ctx.eip = (void*)_exec; //設置回調函數入口
//當實現上下文切換的時候,就會執行入口函數_exec , _exec 調用子過程func
}
第四章 協程的實現之原語操作
問題:協程的內部原語操作有哪些?分別如何實現的?
協程的核心原語操作:create, resume, yield。協程的原語操作有create怎么沒有exit?以NtyCo為例,協程一旦創建就不能有用戶自己銷毀,必須得以子過程執行結束,就會自動銷毀協程的上下文數據。以_exec執行入口函數返回而銷毀協程的上下文與相關信息。co->func(co->arg) 是子過程,若用戶需要長久運行協程,就必須要在func函數里面寫入循環等操作。所以NtyCo里面沒有實現exit的原語操作。
create:創建一個協程。
- 調度器是否存在,不存在也創建。調度器作為全局的單例。將調度器的實例存儲在線程的私有空間pthread_setspecific。
- 分配一個coroutine的內存空間,分別設置coroutine的數據項,棧空間,棧大小,初始狀態,創建時間,子過程回調函數,子過程的調用參數。
- 將新分配協程添加到就緒隊列 ready_queue中
實現代碼如下:
int nty_coroutine_create(nty_coroutine **new_co, proc_coroutine func, void *arg) {
assert(pthread_once(&sched_key_once, nty_coroutine_sched_key_creator) == 0);
nty_schedule *sched = nty_coroutine_get_sched();
if (sched == NULL) {
nty_schedule_create(0);
sched = nty_coroutine_get_sched();
if (sched == NULL) {
printf("Failed to create schedulern");
return -1;
}
}
nty_coroutine *co = calloc(1, sizeof(nty_coroutine));
if (co == NULL) {
printf("Failed to allocate memory for new coroutinen");
return -2;
}
//
int ret = posix_memalign(&co- >stack, getpagesize(), sched- >stack_size);
if (ret) {
printf("Failed to allocate stack for new coroutinen");
free(co);
return -3;
}
co- >sched = sched;
co- >stack_size = sched- >stack_size;
co- >status = BIT(NTY_COROUTINE_STATUS_NEW); //
co- >id = sched- >spawned_coroutines ++;
co- >func = func;
co- >fd = -1;
co- >events = 0;
co- >arg = arg;
co- >birth = nty_coroutine_usec_now();
*new_co = co;
TAILQ_INSERT_TAIL(&co- >sched- >ready, co, ready_next);
return 0;
}
yield:讓出CPU。
void nty_coroutine_yield(nty_coroutine *co)
參數:當前運行的協程實例
調用后該函數不會立即返回,而是切換到最近執行resume的上下文。該函數返回是在執行resume的時候,會有調度器統一選擇resume的,然后再次調用yield的。resume與yield是兩個可逆過程的原子操作。
resume:恢復協程的運行權
int nty_coroutine_resume(nty_coroutine *co)
參數:需要恢復運行的協程實例
調用后該函數也不會立即返回,而是切換到運行協程實例的yield的位置。返回是在等協程相應事務處理完成后,主動yield會返回到resume的地方。
第五章 協程的實現之切換
問題:協程的上下文如何切換?切換代碼如何實現?
首先來回顧一下x86_64寄存器的相關知識。x86_64 的寄存器有16個64位寄存器,分別是:%rax, %rbx, %rcx, %esi, %edi, %rbp, %rsp, %r8, %r9, %r10, %r11, %r12,
%r13, %r14, %r15。
%rax 作為函數返回值使用的。
%rsp 棧指針寄存器,指向棧頂
%rdi, %rsi, %rdx, %rcx, %r8, %r9 用作函數參數,依次對應第1參數,第2參數。。。
%rbx, %rbp, %r12, %r13, %r14, %r15 用作數據存儲,遵循調用者使用規則,換句話說,就是隨便用。調用子函數之前要備份它,以防它被修改
%r10, %r11 用作數據存儲,就是使用前要先保存原值。
上下文切換,就是將CPU的寄存器暫時保存,再將即將運行的協程的上下文寄存器,分別mov到相對應的寄存器上。此時上下文完成切換。如下圖所示:
切換_switch函數定義:
int _switch(nty_cpu_ctx *new_ctx, nty_cpu_ctx *cur_ctx);
參數1:即將運行協程的上下文,寄存器列表
參數2:正在運行協程的上下文,寄存器列表
我們nty_cpu_ctx結構體的定義,為了兼容x86,結構體項命令采用的是x86的寄存器名字命名。
typedef struct _nty_cpu_ctx {
void *esp; //
void *ebp;
void *eip;
void *edi;
void *esi;
void *ebx;
void *r1;
void *r2;
void *r3;
void *r4;
void *r5;
} nty_cpu_ctx;
_switch返回后,執行即將運行協程的上下文。是實現上下文的切換
_switch的實現代碼:
0: __asm__ (
1: " .text n"
2: " .p2align 4,,15 n"
3: ".globl _switch n"
4: ".globl __switch n"
5: "_switch: n"
6: "__switch: n"
7: " movq %rsp, 0(%rsi) # save stack_pointer n"
8: " movq %rbp, 8(%rsi) # save frame_pointer n"
9: " movq (%rsp), %rax # save insn_pointer n"
10: " movq %rax, 16(%rsi) n"
11: " movq %rbx, 24(%rsi) # save rbx,r12-r15 n"
12: " movq %r12, 32(%rsi) n"
13: " movq %r13, 40(%rsi) n"
14: " movq %r14, 48(%rsi) n"
15: " movq %r15, 56(%rsi) n"
16: " movq 56(%rdi), %r15 n"
17: " movq 48(%rdi), %r14 n"
18: " movq 40(%rdi), %r13 # restore rbx,r12-r15 n"
19: " movq 32(%rdi), %r12 n"
20: " movq 24(%rdi), %rbx n"
21: " movq 8(%rdi), %rbp # restore frame_pointer n"
22: " movq 0(%rdi), %rsp # restore stack_pointer n"
23: " movq 16(%rdi), %rax # restore insn_pointer n"
24: " movq %rax, (%rsp) n"
25: " ret n"
26: );
按照x86_64的寄存器定義,%rdi保存第一個參數的值,即new_ctx的值,%rsi保存第二個參數的值,即保存cur_ctx的值。X86_64每個寄存器是64bit,8byte。
Movq %rsp, 0(%rsi) 保存在棧指針到cur_ctx實例的rsp項
Movq %rbp, 8(%rsi)
Movq (%rsp), %rax #將棧頂地址里面的值存儲到rax寄存器中。Ret后出棧,執行棧頂
Movq %rbp, 8(%rsi) #后續的指令都是用來保存CPU的寄存器到new_ctx的每一項中
Movq 8(%rdi), %rbp #將new_ctx的值
Movq 16(%rdi), %rax #將指令指針rip的值存儲到rax中
Movq %rax, (%rsp) # 將存儲的rip值的rax寄存器賦值給棧指針的地址的值。
Ret # 出棧,回到棧指針,執行rip指向的指令。
上下文環境的切換完成。
第六章 協程的實現之定義
問題:協程如何定義? 調度器如何定義?
先來一道設計題:
設計一個協程的運行體R與運行體調度器S的結構體
- 運行體R:包含運行狀態{就緒,睡眠,等待},運行體回調函數,回調參數,棧指針,棧大小,當前運行體
- 調度器S:包含執行集合{就緒,睡眠,等待}
這道設計題拆分兩個個問題,一個運行體如何高效地在多種狀態集合更換。調度器與運行體的功能界限。
6.1 運行體如何高效地在多種狀態集合更換
新創建的協程,創建完成后,加入到就緒集合,等待調度器的調度;協程在運行完成后,進行IO操作,此時IO并未準備好,進入等待狀態集合;IO準備就緒,協程開始運行,后續進行sleep操作,此時進入到睡眠狀態集合。
就緒(ready),睡眠(sleep),等待(wait)集合該采用如何數據結構來存儲?
就緒(ready)集合并不沒有設置優先級的選型,所有在協程優先級一致,所以可以使用隊列來存儲就緒的協程,簡稱為就緒隊列(ready_queue)。
睡眠(sleep)集合需要按照睡眠時長進行排序,采用紅黑樹來存儲,簡稱睡眠樹(sleep_tree)紅黑樹在工程實用為, key為睡眠時長,value為對應的協程結點。
等待(wait)集合,其功能是在等待IO準備就緒,等待IO也是有時長的,所以等待(wait)集合采用紅黑樹的來存儲,簡稱等待樹(wait_tree),此處借鑒nginx的設計。
數據結構如下圖所示:
Coroutine就是協程的相應屬性,status表示協程的運行狀態。sleep與wait兩顆紅黑樹,ready使用的隊列,比如某協程調用sleep函數,加入睡眠樹(sleep_tree),status |= S即可。比如某協程在等待樹(wait_tree)中,而IO準備就緒放入ready隊列中,只需要移出等待樹(wait_tree),狀態更改status &= ~W即可。有一個前提條件就是不管何種運行狀態的協程,都在就緒隊列中,只是同時包含有其他的運行狀態。
6.2 調度器與協程的功能界限
每一協程都需要使用的而且可能會不同屬性的,就是協程屬性。每一協程都需要的而且數據一致的,就是調度器的屬性。比如棧大小的數值,每個協程都一樣的后不做更改可以作為調度器的屬性,如果每個協程大小不一致,則可以作為協程的屬性。
用來管理所有協程的屬性,作為調度器的屬性。比如epoll用來管理每一個協程對應的IO,是需要作為調度器屬性。
按照前面幾章的描述,定義一個協程結構體需要多少域,我們描述了每一個協程有自己的上下文環境,需要保存CPU的寄存器ctx;需要有子過程的回調函數func;需要有子過程回調函數的參數 arg;需要定義自己的棧空間 stack;需要有自己棧空間的大小 stack_size;需要定義協程的創建時間 birth;需要定義協程當前的運行狀態 status;需要定當前運行狀態的結點(ready_next, wait_node, sleep_node);需要定義協程id;需要定義調度器的全局對象 sched。
協程的核心結構體如下:
typedef struct _nty_coroutine {
nty_cpu_ctx ctx;
proc_coroutine func;
void *arg;
size_t stack_size;
nty_coroutine_status status;
nty_schedule *sched;
uint64_t birth;
uint64_t id;
void *stack;
RB_ENTRY(_nty_coroutine) sleep_node;
RB_ENTRY(_nty_coroutine) wait_node;
TAILQ_ENTRY(_nty_coroutine) ready_next;
TAILQ_ENTRY(_nty_coroutine) defer_next;
} nty_coroutine;
調度器是管理所有協程運行的組件,協程與調度器的運行關系。
調度器的屬性,需要有保存CPU的寄存器上下文 ctx,可以從協程運行狀態yield到調度器運行的。從協程到調度器用yield,從調度器到協程用resume
以下為協程的定義。
typedef struct _nty_coroutine_queue nty_coroutine_queue;
typedef struct _nty_coroutine_rbtree_sleep nty_coroutine_rbtree_sleep;
typedef struct _nty_coroutine_rbtree_wait nty_coroutine_rbtree_wait;
typedef struct _nty_schedule {
uint64_t birth;
nty_cpu_ctx ctx;
struct _nty_coroutine *curr_thread;
int page_size;
int poller_fd;
int eventfd;
struct epoll_event eventlist[NTY_CO_MAX_EVENTS];
int nevents;
int num_new_events;
nty_coroutine_queue ready;
nty_coroutine_rbtree_sleep sleeping;
nty_coroutine_rbtree_wait waiting;
} nty_schedule;
第七章 協程的實現之調度器
問題:協程如何被調度?
調度器的實現,有兩種方案,一種是生產者消費者模式,另一種多狀態運行。
7.1 生產者消費者模式
邏輯代碼如下:
while (1) {
//遍歷睡眠集合,將滿足條件的加入到ready
nty_coroutine *expired = NULL;
while ((expired = sleep_tree_expired(sched)) != ) {
TAILQ_ADD(&sched- >ready, expired);
}
//遍歷等待集合,將滿足添加的加入到ready
nty_coroutine *wait = NULL;
int nready = epoll_wait(sched- >epfd, events, EVENT_MAX, 1);
for (i = 0;i < nready;i ++) {
wait = wait_tree_search(events[i].data.fd);
TAILQ_ADD(&sched- >ready, wait);
}
// 使用resume回復ready的協程運行權
while (!TAILQ_EMPTY(&sched- >ready)) {
nty_coroutine *ready = TAILQ_POP(sched- >ready);
resume(ready);
}
}
7.2 多狀態運行
實現邏輯代碼如下:
while (1) {
//遍歷睡眠集合,使用resume恢復expired的協程運行權
nty_coroutine *expired = NULL;
while ((expired = sleep_tree_expired(sched)) != ) {
resume(expired);
}
//遍歷等待集合,使用resume恢復wait的協程運行權
nty_coroutine *wait = NULL;
int nready = epoll_wait(sched- >epfd, events, EVENT_MAX, 1);
for (i = 0;i < nready;i ++) {
wait = wait_tree_search(events[i].data.fd);
resume(wait);
}
// 使用resume恢復ready的協程運行權
while (!TAILQ_EMPTY(sched- >ready)) {
nty_coroutine *ready = TAILQ_POP(sched- >ready);
resume(ready);
}
}
第八章 協程性能測試
測試環境:4臺VMWare 虛擬機
1臺服務器 6G內存,4核CPU
3臺客戶端 2G內存,2核CPU
操作系統:ubuntu 14.04
服務器端測試代碼:https://https://github.com/wangbojing/NtyCotyCo
客戶端測試代碼:https://https://github.com/wangbojing/c1000k_test/blob/master/client_mutlport_epoll.c1000k_test/blob/master/client_mutlport_epoll.c
按照每一個連接啟動一個協程來測試。每一個協程棧空間 4096byte
6G內存 –> 測試協程數量100W無異常。并且能夠正常收發數據。
-
程序
+關注
關注
117文章
3785瀏覽量
81006 -
代碼
+關注
關注
30文章
4780瀏覽量
68531 -
調度器
+關注
關注
0文章
98瀏覽量
5245
發布評論請先 登錄
相關推薦
談談協程的那些事兒


Python后端項目的協程是什么
Python協程與JavaScript協程的對比及經驗技巧
使用channel控制協程數量
詳解Linux線程、線程與異步編程、協程與異步
協程的概念及協程的掛起函數介紹
FreeRTOS任務與協程介紹
Linux線程、線程與異步編程、協程與異步介紹





 工商網監
工商網監
評論