") 使用HAL庫進行電機測速濾波
使用HAL庫進行電機測速濾波
如果將測得的速度值用VOFA+上位機畫出來,我們可能會看到這樣的曲線
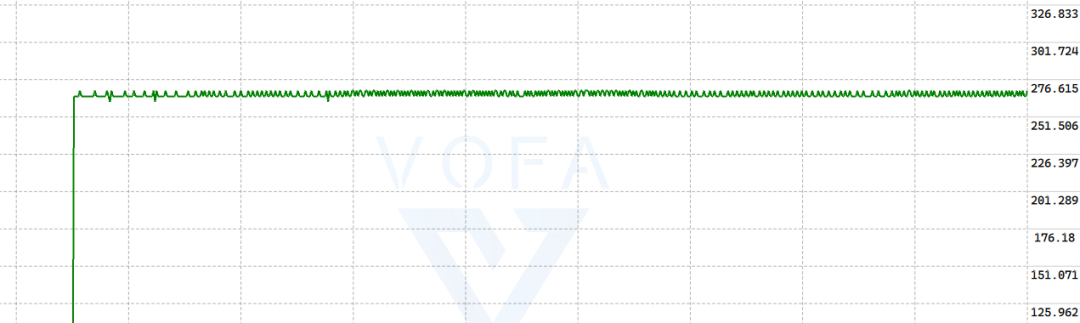
從圖中我們可以看到,速度值在目標速度附近來回小幅度震蕩,始終不穩(wěn)定。這是因為編碼器測速得到的速度值是離散的,如果電機的速度值剛好卡在兩個離散值中間,我們測得的速度值就會在這兩個離散值中間來回震蕩。如果我們想要解決這個問題,最好先對測速的精度進行分析。
對于M法測速來說,測速的公式如下,其中,k是將速度換算成rpm的比例系數(shù)

由于除號后面的都是定值,所以我們只要分析每次采樣的脈沖數(shù)對速度的影響即可。
我們假設(shè)現(xiàn)在測速頻率是50Hz,減速比為30,編碼器線數(shù)為13,那么脈沖數(shù)每變化1,速度的變化為

所以我們測得的速度只能是1.923rpm的整數(shù)倍。如果想要提高精度,在電機不變的情況下,我們可以使用500線的GMR編碼器或者降低測速頻率。
在VOFA+中,我們可以測得震蕩時波峰和波谷的差值為1.92左右,和我們的計算相符。
為了改善這一現(xiàn)象,我們可以對速度采樣值使用平均濾波,即將最近幾次的速度采樣值存放到數(shù)組中,每測得一個新的速度,就將新速度存入數(shù)組,將最早測得的速度值從數(shù)組中刪除,我們使用的速度值是數(shù)組中所有速度的平均值。實現(xiàn)代碼如下
#define SPEED_RECORD_NUM 20 // 經(jīng)測試,50Hz個采樣值進行濾波的效果比較好
float speed_Record[SPEED_RECORD_NUM]={0};
/*
* 進行速度的平均濾波
* 輸入新采樣到的速度,存放速度的數(shù)組,
* 返回濾波后的速度
*/
float Speed_Low_Filter(float new_Spe,float *speed_Record)
{
float sum = 0.0f;
test_Speed = new_Spe;
for(uint8_t i=SPEED_RECORD_NUM-1;i >0;i--)//將現(xiàn)有數(shù)據(jù)后移一位
{
speed_Record[i] = speed_Record[i-1];
sum += speed_Record[i-1];
}
speed_Record[0] = new_Spe;//第一位是新的數(shù)據(jù)
sum += new_Spe;
test_Speed = sum/SPEED_RECORD_NUM;
return sum/SPEED_RECORD_NUM;//返回均值
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)//定時器回調(diào)函數(shù),用于計算速度
{
if(htim- >Instance==GAP_TIM.Instance)//間隔定時器中斷,是時候計算速度了
{
motor1.direct = __HAL_TIM_IS_TIM_COUNTING_DOWN(&ENCODER_TIM);//如果向上計數(shù)(正轉(zhuǎn)),返回值為0,否則返回值為1
motor1.totalCount = COUNTERNUM_1 + motor1.overflowNum * RELOADVALUE_1;//一個周期內(nèi)的總計數(shù)值等于目前計數(shù)值加上溢出的計數(shù)值
if(motor1.lastCount - motor1.totalCount > 19000) // 在計數(shù)值溢出時進行防溢出處理
{
motor1.overflowNum++;
motor1.totalCount = COUNTERNUM_1 + motor1.overflowNum * RELOADVALUE_1;//一個周期內(nèi)的總計數(shù)值等于目前計數(shù)值加上溢出的計數(shù)值
}
else if(motor1.totalCount - motor1.lastCount > 19000) // 在計數(shù)值溢出時進行防溢出處理
{
motor1.overflowNum--;
motor1.totalCount = COUNTERNUM_1 + motor1.overflowNum * RELOADVALUE_1;//一個周期內(nèi)的總計數(shù)值等于目前計數(shù)值加上溢出的計數(shù)值
}
motor1.speed = (float)(motor1.totalCount - motor1.lastCount) / (4 * MOTOR_SPEED_RERATIO * PULSE_PRE_ROUND) * 3000;//算得每秒多少轉(zhuǎn),除以4是因為4倍頻
/*******************在這里添加濾波函數(shù)************************/
motor1.speed = Speed_Low_Filter(motor1.speed,speed_Record);
/**********************************************************/
motor1.lastCount = motor1.totalCount; //記錄這一次的計數(shù)值
}
經(jīng)過濾波后的速度曲線如下。
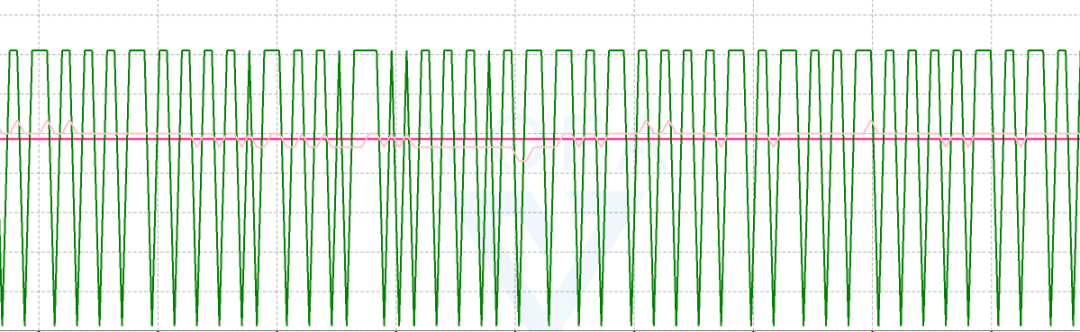
綠線是原始速度,紅線是目標速度,粉線是濾波后的速度。可以看到,濾波后的速度值明顯要平滑很多,這對我們后期的PID調(diào)試是很有利的。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
編碼器
+關(guān)注
關(guān)注
45文章
3639瀏覽量
134430 -
濾波
+關(guān)注
關(guān)注
10文章
667瀏覽量
56633 -
測速
+關(guān)注
關(guān)注
0文章
38瀏覽量
14145
發(fā)布評論請先 登錄
相關(guān)推薦
使用STM32 HAL庫進行GPIO控制的實例
在基于STM32微控制器的嵌入式系統(tǒng)開發(fā)中,GPIO(GeneralPurposeInput/Output)控制是其中最基本、最常見的操作之一。通過使用STM32的HAL庫,可以輕松地對GPIO進行配置和控制。本文將演示如何使用
【HAL庫每天一例】第113例:單軸25GA370直流電機編碼測速(L298N驅(qū)動)
的,我們還程序發(fā)布基于HAL庫的指導文檔和視頻教程,歡迎持續(xù)關(guān)注,并提出改進意見。參考文檔見:硬石電機控制專題指導手冊例程下載:資料包括程序、相關(guān)說明資料以及軟件使用截圖百度云盤:https
發(fā)表于 09-05 08:45
STM32標準庫改為HAL庫的程序?qū)崿F(xiàn)
標準庫占絕大多數(shù),自己買的板子跟的資料也一般是標準庫,HAL庫很少,不過要是使用STM32CubeMx配置,那么就是使用的HAL
發(fā)表于 11-22 11:23
?3.5w次閱讀
測速發(fā)電機的使用范圍 測速電機的特點
元件 (3)用做解算元件 測速電機的特點: 1、 測速發(fā)電機的輸出電壓信號,電壓量程可在10幾伏到幾百伏之間; 2、 測速
仿標準庫,對HAL庫的補充代碼
前言: ST官方從2017年下半年開始就不再維護升級標準庫,轉(zhuǎn)而推廣HAL庫。到2019年,HAL庫仍不夠成熟,其原因有以下: 1.
發(fā)表于 11-29 11:36
?30次下載

stm32F103 基于HAL庫的直流電機驅(qū)動(一)
stm32F103 基于HAL庫的直流電機驅(qū)動目錄stm32F103 基于HAL庫的直流電機驅(qū)動
發(fā)表于 01-12 19:48
?37次下載
【STM32】HAL庫 PWM控制電機轉(zhuǎn)速與編碼器讀取(超詳解)
??大家好,我是小政。本篇文章我將針對PWM控制電機與編碼器讀取電機轉(zhuǎn)速的STM32CubeMX配置過程進行詳細的講解,讓準備學習HAL庫的
發(fā)表于 01-14 12:39
?95次下載

STM32 HAL庫的功能和使用方法 STM32 HAL庫和標準庫的區(qū)別
HAL(Hardware Abstraction Layer)是指硬件抽象層,是一種封裝底層硬件接口驅(qū)動的編程庫。在嵌入式系統(tǒng)中,HAL庫可以更加方便地實現(xiàn)硬件控制和設(shè)備訪問,提高代碼
發(fā)表于 08-08 18:21
?4372次閱讀
STM32 HAL庫串口收發(fā)是如何使用的?
的一種庫,它提供了一種簡單易用的方法來使用STM32的各種外設(shè)。 本文將詳細介紹如何使用STM32 HAL庫來進行串口通信,包括初始化、發(fā)送數(shù)據(jù)和接收數(shù)據(jù)等方面。 1. 初始化串口 首
如何快速入門HAL庫編程 HAL庫與裸機編程的比較
如何快速入門HAL庫編程 要快速入門HAL庫編程,可以遵循以下步驟: 了解基礎(chǔ)知識 : 掌握C語言編程基礎(chǔ),包括變量、數(shù)據(jù)類型、函數(shù)、指針等。 了解嵌入式系統(tǒng)的基本概念,如微控制器、中





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論