") 自動(dòng)駕駛PID、LQR和滑模控制介紹
自動(dòng)駕駛PID、LQR和滑模控制介紹
PID控制
PID控制又稱比例-積分-微分控制器。在自動(dòng)駕駛汽車跟蹤控制中,該算法主要是對(duì)車輛反饋的車輛位姿等信息做偏差處理,并通過(guò)比例、積分、微分進(jìn)行線性組合構(gòu)成控制量,從而對(duì)被控對(duì)象進(jìn)行控制。
該算法由于無(wú)需建立精確模型,算法簡(jiǎn)單易實(shí)現(xiàn),廣泛應(yīng)用于各工業(yè)領(lǐng)域,但其參數(shù)調(diào)整比較困難,因此有許多學(xué)者將現(xiàn)代智能化算法如模糊控制、神經(jīng)網(wǎng)絡(luò)控制等算法與
PID算法進(jìn)行結(jié)合,簡(jiǎn)化了控制器參數(shù)調(diào)整過(guò)程。
通過(guò)計(jì)算期望車速與實(shí)際車速的偏差,
模糊免疫PID速度跟蹤控制器控制制動(dòng)/油門機(jī)械腿分別操縱制動(dòng)/油門踏板。通過(guò)引入車速反饋不斷更新汽車的側(cè)向加速度增益,
實(shí)現(xiàn)了車輛轉(zhuǎn)向控制與縱向車速控制的解耦。
仿真實(shí)驗(yàn)表明該算法能使平衡小車在保持動(dòng)態(tài)平衡的前提下對(duì)指定軌跡進(jìn)行的良好跟蹤,具有較快的動(dòng)態(tài)響應(yīng)速度,對(duì)干擾具有良好的魯棒性。
對(duì)于縱向控制,總車輪扭矩由嵌入MPC框架中的PID速度控制器產(chǎn)生。仿真試驗(yàn)結(jié)果表明,該控制器對(duì)車輛橫向和縱向位置的跟蹤誤差較小,對(duì)軌跡和速度的跟蹤性能良好。
LQR控制
LQR控制器是一種多目標(biāo)最優(yōu)控制,能夠使系統(tǒng)在被控時(shí)間內(nèi),尋求最優(yōu)控制率減小目標(biāo)函數(shù)以達(dá)到最優(yōu)控制效果,即以較小的控制量和代價(jià)使系統(tǒng)穩(wěn)定達(dá)到目標(biāo)狀態(tài)。
該控制算法易于設(shè)計(jì),但在曲率變化較大的路段進(jìn)行跟蹤控制時(shí),會(huì)使得跟蹤誤差變大而導(dǎo)致跟蹤失敗,因此往往需要結(jié)合其他控制算法如前饋控制來(lái)進(jìn)行無(wú)誤差跟蹤。
結(jié)果表明,所提出的控制方法可有效提高控制精度,實(shí)現(xiàn)鉸接式車輛的精確、穩(wěn)定路徑跟蹤。
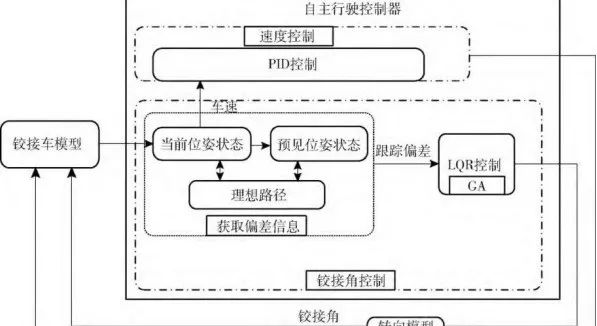
圖2-7 對(duì)于基于鉸鏈車模型的路徑跟蹤控制系統(tǒng)
其次,利用LQR最優(yōu)控制實(shí)現(xiàn)該線性系統(tǒng)的閉環(huán)控制,以保證其穩(wěn)定性和快速收斂性。在此過(guò)程中,通過(guò)矩陣Q和r平衡狀態(tài)變量和輸入的權(quán)重,可以得到LQR的最優(yōu)二次型性能指標(biāo),因此可以方便地調(diào)整和標(biāo)定控制參數(shù)。
2.6 滑模控制
滑模控制(SMC)又稱滑模變結(jié)構(gòu)控制,是一種典型的非線性反饋控制方法,具有很強(qiáng)的抗不確定性擾動(dòng)能力。通過(guò)設(shè)計(jì)合適的滑動(dòng)模態(tài),可以迫使系統(tǒng)快速按照預(yù)定的狀態(tài)軌跡運(yùn)行,具有魯棒閉環(huán)性能。
滑模控制的缺點(diǎn)主要是其不連續(xù)的開關(guān)特性將會(huì)引起抖動(dòng),降低控制系統(tǒng)抖動(dòng)是目前該領(lǐng)域的研究熱點(diǎn)與難點(diǎn)。
首先,對(duì)車輛的運(yùn)動(dòng)過(guò)程進(jìn)行研究,建立車輛的運(yùn)動(dòng)學(xué)模型。
其次,基于B樣條曲線理論建立非線性約束平行泊車路徑優(yōu)化函數(shù),并分析車輛運(yùn)動(dòng)學(xué)約束條件。
然后,結(jié)合非時(shí)間參考路徑跟蹤控制和終端滑模控制方法,提出基于趨近律的非時(shí)間參考終端滑模路徑跟蹤控制方法。
-
控制器
+關(guān)注
關(guān)注
112文章
16339瀏覽量
177843 -
PID
+關(guān)注
關(guān)注
35文章
1472瀏覽量
85485 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13787瀏覽量
166404 -
LQR
+關(guān)注
關(guān)注
1文章
6瀏覽量
3144
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論