") 任務狀態(tài)機的相關概念
任務狀態(tài)機的相關概念
[導讀] 大家好,我是逸珺。
前面一文利用FreeRTOS點燈,算是將FreeRTOS給跑起來了,要用好RTOS,從黑盒角度去理解一下調(diào)度器是怎么工作的是很必要的,當然如果想研究其內(nèi)部實現(xiàn)原理,可以去讀其內(nèi)部實現(xiàn)代碼,但是個人感覺如果是從用的角度,把內(nèi)核看成黑盒,跳出來梳理一下概念也很有用。
所以本文不切入內(nèi)核代碼,僅從用戶視角來學習一下任務狀態(tài)機相關的概念,以及相應API的作用。
RTOS核的作用
前面一文分析FreeRTOS框架的時候,曾給出這樣一個理解圖:
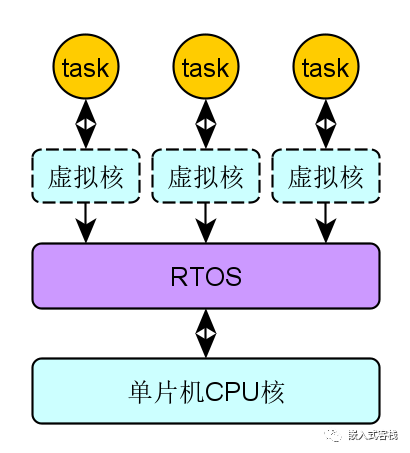
對于單片機而言,一般只有一個核,RTOS的主要作用是將用戶多任務進行管理,在物理CPU核上調(diào)度管理。所以為了方便理解,可以將RTOS的調(diào)度管理器,看成是將硬件CPU核通過軟件的辦法為每一個應用任務虛擬出一個軟核。這樣就使每個任務看起來都擁有一個CPU核,這樣從時間維度上看起來多任務是并行的,而事實上這種并行是偽并行。
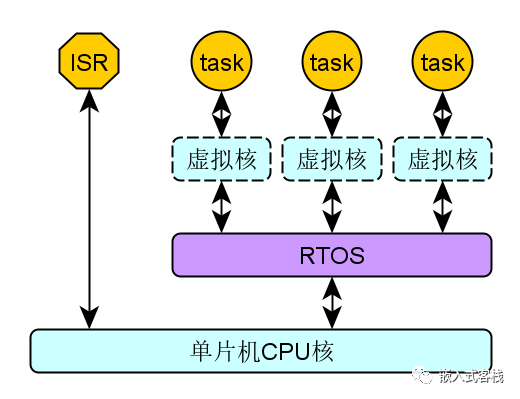
一般單片機只有一個硬件核,那么在任意時刻,則只可能有一個任務在運行。其實這樣理解還不全面,能夠獲取CPU時間的,從應用編程的視角,還有一個主角是不能忽略的,那就是中斷程序。
任務狀態(tài)
狀態(tài)概念
對于FreeRTOS的狀態(tài)概念有必要先好好理解一下,理解了才能正確的使用API進行正確的應用,才知道調(diào)用了某一個API究竟會有怎樣的行為表現(xiàn)。
<
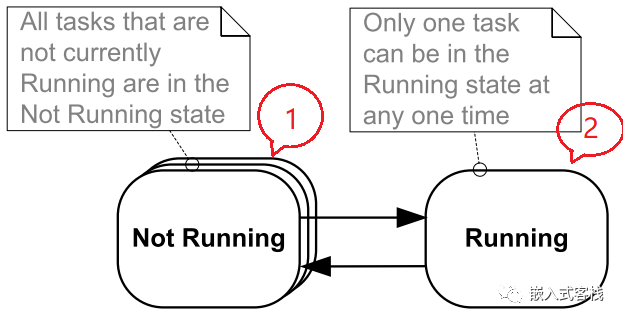
對于單內(nèi)核的芯片而言,任一任務要么處于運行態(tài),要么處于非運行態(tài)。但同一時刻只能有一個任務處于運行態(tài)。這也是為什么這個圖中①畫的任務框是多個疊起來的,而②所示的任務只有一個框的原因。那么事實上,對于非運行態(tài)其內(nèi)部又被劃分出了幾個子狀態(tài):
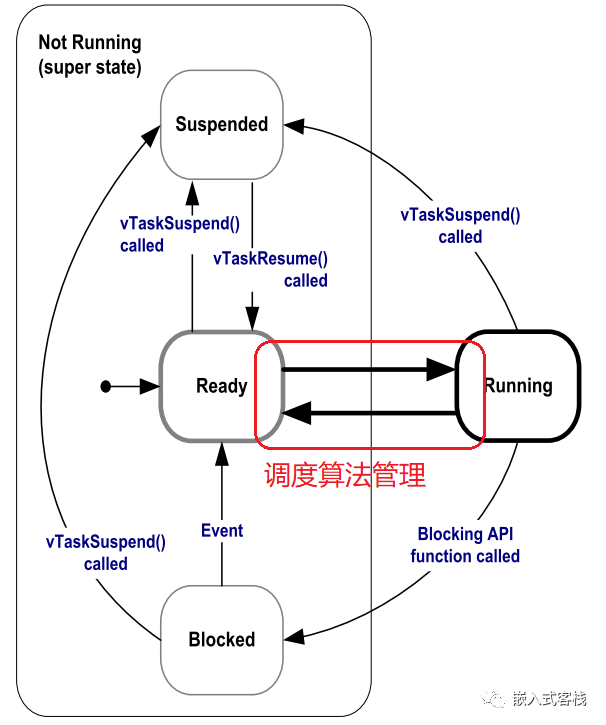
Suspended: 掛起態(tài),什么叫掛起呢?簡單講就是任務進入了掛起態(tài)后,調(diào)度器就不會對其進行調(diào)度了,也就是它不會被調(diào)度器裝載到CPU核中運行,任務狀態(tài)始終保持在進入掛起態(tài)時刻的現(xiàn)場。
就好比看一個修仙劇,內(nèi)核調(diào)度器是一個法術高手,會時間靜止法術,啪一個法術,這個任務就被定住了,不能再動了。但任務還在,只是不動了。直到法術解除。那么這里所謂的現(xiàn)場,就是該任務的TCB任務控制數(shù)據(jù)結構,將暫停時刻的物理CPU相關寄存器保存了。
Ready: 就緒態(tài),就是指任務可以被調(diào)度器裝載進CPU核運行的狀態(tài),但是還沒有被裝載進CPU核。為什么有這樣一個就緒態(tài)呢?前面說了,RTOS主要作用就是多任務的調(diào)度管理。那么就緒的任務就有可能是多個,也就是說在同一時刻,多個任務有可能都就緒了,至于調(diào)度器究竟讓哪一個任務先運行呢,這就是調(diào)度器調(diào)度算法的職責了,根據(jù)其內(nèi)部的調(diào)度算法策略進行調(diào)度管理。
FreeRTOS支持的調(diào)度算法有:
時間片調(diào)度策略:也稱為Round Robin調(diào)度算法,Round Robin調(diào)度算法不保證同等優(yōu)先級的任務之間平均分配時間,只保證同等優(yōu)先級的Ready狀態(tài)任務會依次進入Running狀態(tài)。
這可能讓人費解,首先時間片Time Slice是指兩個Tick中斷間的時間間隔,每次新的Tick中斷時,調(diào)度器會檢查任務隊列中是否有與正在運行的任務優(yōu)先級相同的就緒態(tài)任務,如果有,就將正在運行的任務換出CPU,將新任務換入CPU。所以該機制并不保證相同優(yōu)先級就緒態(tài)任務獲得的CPU時間片相等。
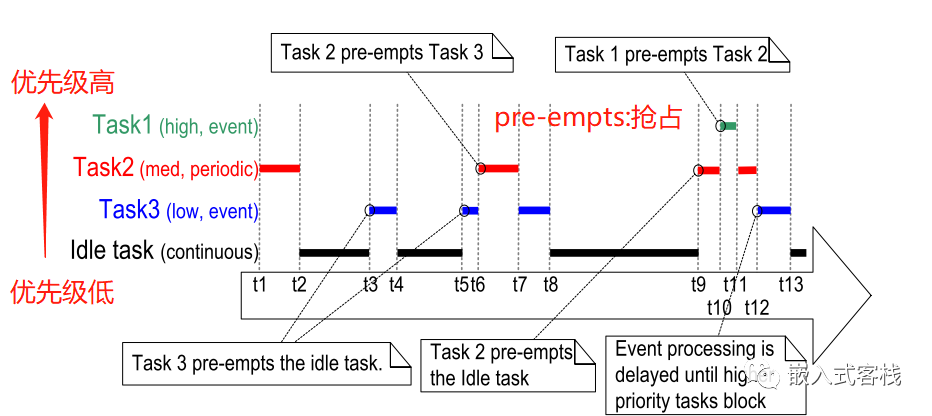
固定優(yōu)先級搶占式調(diào)度:這種調(diào)度算法根據(jù)任務的優(yōu)先級選擇任務進行裝載。換句話說,高優(yōu)先級任務總是在低優(yōu)先級任務之前獲得CPU。只有當沒有處于就緒狀態(tài)的高優(yōu)先級任務時,低優(yōu)先級任務才能執(zhí)行。
更準確地理解:如果優(yōu)先級高于運行狀態(tài)任務的任務進入就緒狀態(tài),搶占式調(diào)度算法將立即“搶占”運行狀態(tài)的低優(yōu)先級任務。被搶占意味著低優(yōu)先級任務馬上被調(diào)度器換出運行狀態(tài),并進入就緒狀態(tài),而高優(yōu)先級任務被轉(zhuǎn)載進CPU進行運行。需要注意的是,低優(yōu)先級任務是進入就緒態(tài)而非掛起態(tài),當高優(yōu)先級任務完成運行,進入阻塞態(tài)后,原低優(yōu)先級任務將有機會被調(diào)度運行。
Blocked: 阻塞態(tài)。所謂阻塞態(tài),可以簡單理解是任務被卡在了哪里,該任務不會繼續(xù)往下運行,直到阻塞解除,被轉(zhuǎn)入就緒態(tài),然后被調(diào)度至運行態(tài)。需要注意區(qū)分的是:阻塞態(tài)與暫停態(tài)是兩回事,暫停是被移除調(diào)度列表,除非被人為恢復進任務調(diào)度表。而阻塞態(tài),當阻塞事件解除,會自動進入就緒態(tài),從而有機會被調(diào)度器換入CPU進而運行。
阻塞事件基本可以分成兩類:
時間事件:比如vTaskDelay調(diào)用,任務將延遲一定的時間,一旦該函數(shù)被調(diào)用,該任務就被阻塞,直到延遲的時間結束會進入就緒態(tài)。
同步事件:比如等待消息隊列、獲取信號量、獲取互斥體等等。
上面說到搶占式調(diào)度算法,看下面這個圖就比較好理解了,在圖中所示的時間點,高優(yōu)先級的任務一旦就緒則會馬上搶占低優(yōu)先級任務。
狀態(tài)切換
前面將狀態(tài)概念擼了一遍,狀態(tài)機的理解需要從兩個維度進行理解:1.有哪些狀態(tài),每個狀態(tài)啥物理含義;2.狀態(tài)的切換條件,什么條件會觸發(fā)狀態(tài)變化。
上面的任務狀態(tài)圖描述的比較清楚,這里總結一下這些狀態(tài)究竟怎么切換的:
進入掛起態(tài):在任務的任意狀態(tài)下,一旦應用程序調(diào)用了vTaskSuspend這個API,就會將指定的任務設置掛起態(tài)。
voidvTaskSuspend(TaskHandle_tpxTaskToSuspend); voidvTaskSuspendAll(void);
以上兩個任務都可以用于將任務設置成掛起態(tài),vTaskSuspend用于將指定的任務設置為掛起態(tài),pxTaskToSuspend就是指定的任務描述符,而vTaskSuspendAll將所有任務設置成掛起態(tài)。
退出掛起態(tài):當任務已經(jīng)處于掛起態(tài),如應用需要將其恢復,需要調(diào)用vTaskResume或者xTaskResumeAll,將某個任務或者全部任務恢復為就緒態(tài)。注意是就緒態(tài)而非運行態(tài),進入運行態(tài)是調(diào)度器實現(xiàn)的。
voidvTaskResume(TaskHandle_tpxTaskToResume); BaseType_txTaskResumeAll(void);
要讓任務恢復運行,上面兩個API必須要在非掛起態(tài)任務中調(diào)用,否則是不可能被恢復的,因為處于掛起態(tài)的任務是沒有機會獲得CPU使用權運行的。
對于掛起態(tài)的應用場景的思考,比如應用程序中檢測到某個故障了,此時需要處理故障,就可以將某個任務掛起,或者全部掛起,直到故障消除。
進入阻塞態(tài):阻塞的概念是相對于運行而言的,也就是說一個正在運行的任務由于OS API調(diào)用會卡住不往下運行,所以狀態(tài)圖中是運行態(tài)會被阻塞,也就是說該任務本來正在運行,但在這個調(diào)用之后就會被調(diào)度器換出CPU。
有哪些API會讓一個正處于運行的任務阻塞呢?
1.時間事件API:
voidvTaskDelay(TickType_txTicksToDelay); voidvTaskDelayUntil(TickType_t*pxPreviousWakeTime,TickType_txTimeIncrement);
這兩個API是當任務希望主動出讓CPU時使用,一旦調(diào)用該任務就被設置為阻塞態(tài),直到需要等待的時間結束,調(diào)度器將相應的任務設置為就緒態(tài)。調(diào)度器再根據(jù)調(diào)度算法決定是否被裝載進CPU核運行。
應用例子:比如某個需要固定周期執(zhí)行的任務,就可以在任務應用代碼執(zhí)行完后調(diào)用這個延遲函數(shù),出讓CPU。讓其他的任務有機會被轉(zhuǎn)載運行。
vTaskDelayUntil一般會先獲取當前Tick數(shù),然后再延遲到某一個增加量。
2.同步事件API:
uint32_tulTaskNotifyTake(BaseType_txClearCountOnExit,TickType_txTicksToWait); BaseType_txTaskNotifyWait(uint32_tulBitsToClearOnEntry, uint32_tulBitsToClearOnExit, uint32_t*pulNotificationValue, TickType_txTicksToWait); //消息隊列相關 BaseType_txQueueReceive(QueueHandle_txQueue, void*pvBuffer, TickType_txTicksToWait); BaseType_txQueueReceiveFromISR(QueueHandle_txQueue, void*pvBuffer, BaseType_t*pxHigherPriorityTaskWoken); BaseType_txQueuePeek(QueueHandle_txQueue, void*pvBuffer,TickType_t xTicksToWait); BaseType_txQueuePeekFromISR(QueueHandle_txQueue,void*pvBuffer); //信號量相關 BaseType_txSemaphoreTake(SemaphoreHandle_txSemaphore,TickType_txTicksToWait); BaseType_txSemaphoreTakeFromISR(SemaphoreHandle_txSemaphore, signedBaseType_t*pxHigherPriorityTaskWoken); BaseType_txSemaphoreTakeRecursive(SemaphoreHandle_txMutex, TickType_txTicksToWait); //stream相關 size_txStreamBufferReceive(StreamBufferHandle_txStreamBuffer, void*pvRxData, size_txBufferLengthBytes, TickType_txTicksToWait); size_txStreamBufferReceiveFromISR(StreamBufferHandle_txStreamBuffer, void*pvRxData, size_txBufferLengthBytes, BaseType_t*pxHigherPriorityTaskWoken); //Event相關 EventBits_txEventGroupWaitBits(constEventGroupHandle_txEventGroup, constEventBits_tuxBitsToWaitFor, constBaseType_txClearOnExit, constBaseType_txWaitForAllBits, TickType_txTicksToWait); EventBits_txEventGroupSync(EventGroupHandle_txEventGroup, constEventBits_tuxBitsToSet, constEventBits_tuxBitsToWaitFor, TickType_txTicksToWait); //message相關 size_txMessageBufferReceive(MessageBufferHandle_txMessageBuffer, void*pvRxData, size_txBufferLengthBytes, TickType_txTicksToWait); size_txMessageBufferReceiveFromISR(MessageBufferHandle_txMessageBuffer, void*pvRxData, size_txBufferLengthBytes, BaseType_t*pxHigherPriorityTaskWoken);
此類任務主要用于任務間,或者任務與中斷間同步或通訊的目的,在等待某一個消息或者事件的時候,將該任務阻塞而不是裸奔的查詢等待,本質(zhì)上就是為了提高CPU的利用率的。
需要注意的是,有的API是不能用于等待來自中斷的消息或者事件的,如果需要與中斷程序同步或者通信,需要使用相應的中斷版本API。
總結一下
將FreeRTOS任務相關的狀態(tài)梳理一下,其他的RTOS其實也是類似的,只不過實現(xiàn)細節(jié)會略有差異,從概念上大體上是相通的。要正確的使用RTOS,清楚正確的理解其任務狀態(tài)相關概念是必要的。相關的API并不需要記憶,只需要理解概念就可以了,用的時候查一查就好了。
-
單片機
+關注
關注
6035文章
44553瀏覽量
634767 -
內(nèi)核
+關注
關注
3文章
1372瀏覽量
40282 -
FreeRTOS
+關注
關注
12文章
484瀏覽量
62151 -
狀態(tài)機
+關注
關注
2文章
492瀏覽量
27533
原文標題:使用FreeRTOS要好好理解任務狀態(tài)機
文章出處:【微信號:玩轉(zhuǎn)嵌入式,微信公眾號:玩轉(zhuǎn)嵌入式】歡迎添加關注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關推薦
Verilog狀態(tài)機+設計實例
raw os 之狀態(tài)機編程
如何寫好狀態(tài)機
狀態(tài)機思路在單片機程序設計中的應用
狀態(tài)機舉例
兩段式狀態(tài)機不可能完成的任務

用狀態(tài)機原理進行軟件設計

FPGA:狀態(tài)機簡述

什么是狀態(tài)機?狀態(tài)機5要素
狀態(tài)模式(狀態(tài)機)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論