 OTFS調制和解調詳解
OTFS調制和解調詳解
以下內容為4.1節“系統模型”的中文翻譯,原文請參考英文版《Delay-Doppler Communications Principles and Applications》一書,若本文中存在翻譯錯誤或者編輯錯誤,歡迎留言指正。
隨著高速列車、無人機、無人駕駛汽車的出現,高移動性無線信道迫切需要可靠的通信。在OFDM中,信息符號在單個時頻資源上傳輸,容易受到頻率和時間選擇性衰落的影響,從而降低了高可移性無線信道中的錯誤性能。另一方面,OTFS在一個跨越整個時間和頻率資源的二維(2D)正交基函數上復用每個信息符號。因此,所有信息符號都經歷一個固定的(時不變的)平坦衰落等效信道。
本章從離散時域、時頻域和延遲-多普勒域等不同域的一些基本符號開始,然后描述OTFS調制和解調、高移動率信道以及OTFS與理想脈沖成形波形的輸入輸出關系。
在本章的后面,我們將介紹OTFS矩陣形式,展示OTFS調制如何與眾所周知的離散Zak變換相關。然后,我們用實際矩形脈沖成形波形給出OTFS的輸入輸出關系的矢量化形式,其中考慮了不同的域:離散時域、時頻域、延時時域和延時多普勒域。進一步,我們將我們的研究擴展到OTFS的變體,在這些波形的傳輸中,每個OTFS幀或塊添加一個循環前綴(CP)或零填充(ZP)。最后,我們對OTFS變體的信道表示和輸入輸出關系進行了全面的總結。
4.1系統模型
在本節中,在描述圖4.1中OTFS調制和解調模塊之前,我們介紹有關三個領域的一些符號:離散時域、時頻域和時延-多普勒域。
我們假設OTFS系統運行在一個帶寬為B、最大時延擴展和最大多普勒頻移的P條路徑信道上,定義為(2.11)。我們考慮一個離散時間基帶等效模型,其中連續時間OTFS信號以采樣頻率進行采樣,其中Ts表示采樣間隔。離散域OTFS幀包含了被細分為N個塊(或時隙)的NM樣本,每個塊有M個樣本。因此,OTFS幀持續時間為,其中表示每個塊的持續時間。
每T秒內,獲得每個塊M點DFT的離散頻譜,頻點間隔?f=1/T。帶寬B=M?f的OTFS幀的所有N塊時間軸稱為時頻域,如圖4.2(左)所示,離散時頻域定義為MN點陣列
M,N>0。在Λ的點集合中離散時頻樣本矩陣表示為。其中每一列包含每個塊的離散頻譜樣本。將這個矩陣看作一維時域OTFS信號的二維時頻表示是很方便的。
離散時頻樣本可以通過二維辛傅里葉變換轉換到延遲-多普勒域。具體來說,延時-多普勒域是通過沿頻率軸(列)和沿時間軸(行)的傅里葉反變換從時頻域得到的。離散后,在時延-多普勒域對應的MN點陣列(圖4.2(右))為
其中,1/MΔf和1/NT分別為路徑延遲和多普勒頻移的分辨率。特別是具有相同多普勒頻移但傳播延遲小于1/MΔf不同的兩條路徑,接收機無法區分。同樣,具有相同傳播延遲但多普勒頻移差小于1/NT的兩條路徑也無法區分。
我們定義OTFS波形Γ點的延遲-多普勒采樣為矩陣。
4.1.1 OTFS系統的參數選擇
作為設計的重要參數,我們選擇。我們知道T和?f決定了可支持的最大信道時延 和多普勒頻移 。如果固定數據率到每幀NM個符號,根據信道參數,我們可以選擇T越大(?f越小),將得到越小的N和越大的M,反之亦然。這意味著OTFS可以處理最大,擴展了設計工作在低度擴展信道之外的系統的機會()。OTFS系統的另一個設計約束在于假設多徑信道參數(見第2章)在幀的持續時間內是恒定的。在今天的蜂窩系統環境中,這將T_f限制在最大10 ~ 20毫秒。
4.1.2 OTFS調制
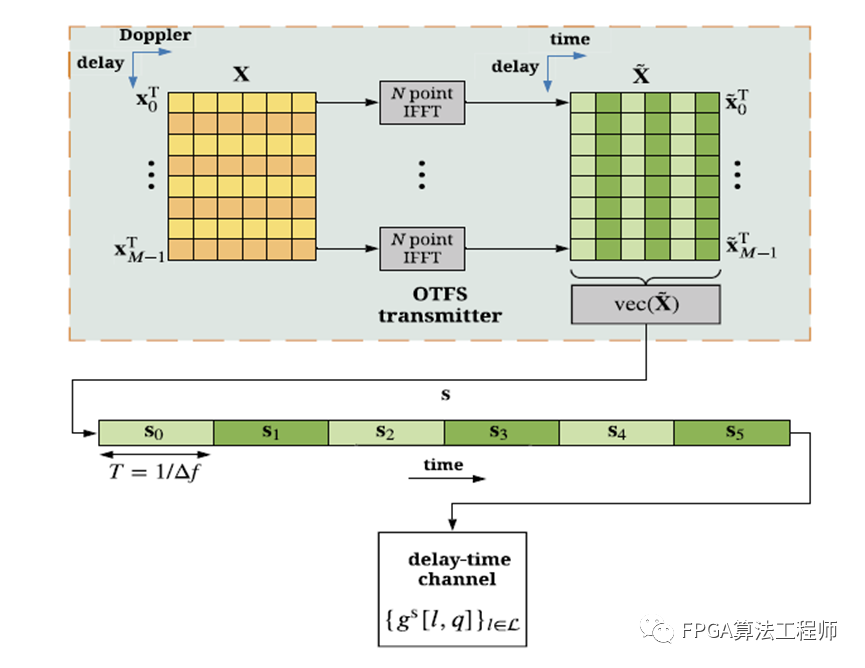
正如圖4.1所示,在發射端,經調制后的長度為Q的序列構成NM信息符號,放置到時延-多普勒域矩陣,并且。
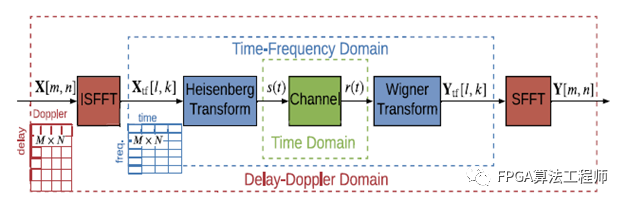
圖4.1 原始形式的OTFS系統圖
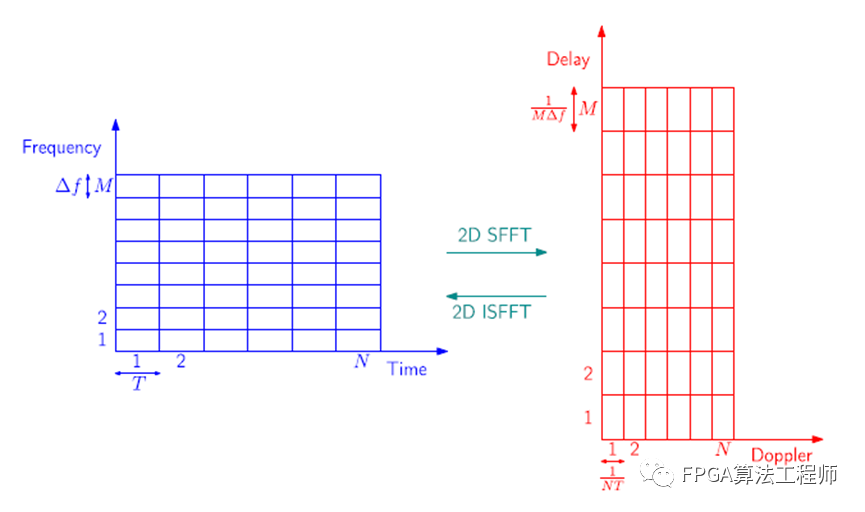
圖4.2 離散時頻網格(Λ)和時延-多普勒網格(Γ)
發射機首先通過逆辛-傅里葉變換(ISFFT)將符號映射到NM樣本的時頻資源格Λ:
,表示時頻域發射樣本矩陣。ISFFT對應于一個二維變換,取X列的m點進行DFT和X行的n點進行逆DFT (IDFT)。接下來,時頻調制器用發射波形對2D的轉換為連續時間波形s(t):
上述操作在文獻中稱為海森堡變換,它依賴于。
4.1.3 高速移動信道失真
信號通過時延-多普勒信道響應h(τ,ν)傳輸,對應于時延響應g(τ,t),其中τ,ν是信道時延和多普勒頻移(參見第2章)。忽略噪聲項,接收信號r(t)由下式給出:
其中,在(2.15)式已給出。
在接收機中,信道受損信號r(t)被離散采樣,。則(4.4)變為
其中,是在時偏的多普勒響應。集合包含信道不同的時偏, 是所有具有相同時偏 的路徑的多普勒頻移的集合。
現在我們考慮一個由P條路徑組成的時變多徑信道,第條路徑()有信道增益,時延,多普勒頻移,在時延的多普勒響應為:
特別地,當歸一化的時延和歸一化的多普勒頻移是整數時,我們用(整數時延抽頭)和(整數多普勒抽頭)表示。然后將(4.6)中的sinc函數替換為(處的單位脈沖,得到離散的延遲時間多徑信道響應:
第二步是由于(4.7)。假設的最大值小于最大信道延遲抽頭,其中。
這里需要注意的是,假設延遲多普勒(或等效的延遲時間)響應在一個OTFS幀的持續時間內是固定的。這意味著,假設的時延-多普勒信道參數是恒定的。為了滿足這一假設,可能有必要以降低多普勒頻移分辨率為代價降低N。
4.1.4 OTFS解調
在圖4.1中,在接收端,接收到的信號r(t)通過一個匹配濾波器,計算交叉模糊函數為
然后在網格點Λ上對進行采樣,形成帶條目的時頻域接收樣本矩陣。
,(4.9)和(4.10)合起來稱為維格納變換。最后,對進行辛快速傅里葉變換(SFFT),得到的時延-多普勒域樣本為:
SFFT對應于一個二維變換,它對Y的列進行m點的IDFT,再對Y的行進行n點的DFT。綜上所述,如圖4.1所示,OTFS調制器利用ISFFT將時延-多普勒域的映射到時頻域的。然后對進行海森堡變換,得到時域信號。在接收端,通過Wigner變換變換到時頻域,然后使用SFFT變換到延遲-多普勒域,然后進行符號解調。
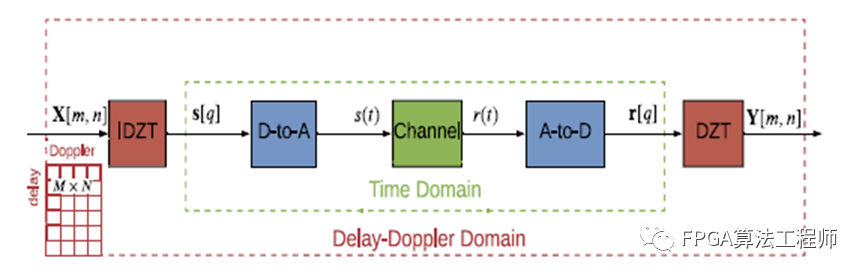
圖4.3 OTFS系統圖使用離散Zak變換
或者,OTFS發射機可以使用逆離散Zak變換(IDZT)和數模轉換器(DA)來實現,以形成發射信號s(t),如圖4.3所示。OTFS接收機可以在接收信號r(t)中使用模數轉換器(AD),然后使用離散Zak變換(DZT)來實現。這種等價性將在第4.3節中變得明顯,我們請讀者參閱第5章以了解關于Zak變換的詳細信息。
審核編輯:湯梓紅
-
發射機
+關注
關注
7文章
505瀏覽量
48009 -
信號
+關注
關注
11文章
2789瀏覽量
76730 -
模型
+關注
關注
1文章
3226瀏覽量
48809 -
無人機
+關注
關注
229文章
10420瀏覽量
180146
原文標題:Delay-Doppler Modulation系統模型
文章出處:【微信號:FPGA算法工程師,微信公眾號:FPGA算法工程師】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
有關于π/4DQPSK調制解調端仿真的嗎???
基于labview的模擬調制解調設計
調制器和解調器
調制器和解調器的測試手段和測試方法
Multisim調制解調電路仿真

鎖相環在調制和解調中的應用
OTFS調制技術的基本原理和優缺點





 工商網監
工商網監
評論