 運動控制系統反饋環節介紹
運動控制系統反饋環節介紹
反饋環節
此處的反饋環節是使用的增量式旋轉編碼器(常見旋轉編碼器分為絕對式和增量式感興趣的小伙伴自己去了解吧);
T法、M法作為信號處理的方式(數字測速方法有三種:T法、M法、M/T法;還有分辨率和測速誤差率這一類的知識感興趣的同學自己去找書研究研究)關于編碼器,已經在硬件篇做過分析,不理解的可以去我第一篇博文查看
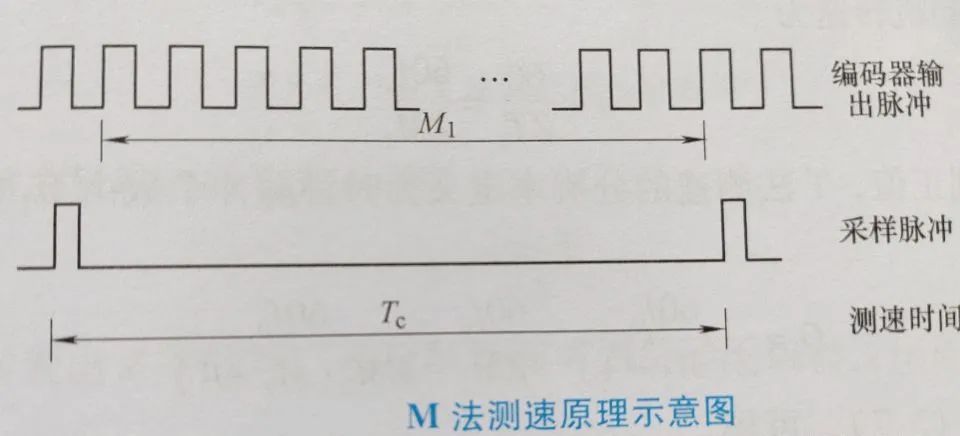
這里主要分析下M法測速和T法測速,電機每轉一圈編碼器(智能車中的電機圈和編碼器圈數不是1:1,需要根據齒數比換算)共產生Z個脈沖,編碼器輸出脈沖的頻率f1 = M1 / Tc。
M法測速:
M法測速:在一定的時間Tc內測取旋轉編碼器輸出的脈沖個數M1,用以計算這段時間內的轉速,稱為M法測速。
由系統的定時器按照采樣周期的時間定時一段時間,這里我們假設為Tc=1s,利用單片機的計數器捕獲編碼器在此段時間內產生的上升沿或者下降沿個數M1這里假設為1024,設電機旋轉一圈,編碼器產生512個脈沖
則此時轉速為:
n = M1 / Z*Tc = 1024 / 512×1 單位:r/s
n1 = 2 r/s
M法總結:定時一段時間Tc,記錄下此段時間內產生的脈沖數M1,再用電機運動一圈的脈沖數Z聯立可以得到n=M1 / Z*Tc。
T法測速
T法測速是測出旋轉編碼器兩個輸出脈沖之間的間隔時間來計算轉速,也被稱為周期法測速。
T法測速其實就是采集編碼器兩個相鄰上升沿或者下降沿所用時間
Tt=M2 / f0 ;
M2可以理解成在編碼器第一個上升沿開始計數到第二個上升沿到來時停止計數的時鐘周期個數;
f0可以理解為單片機的時鐘脈沖頻率;
此處為方便理解,假設1s時間單片機時鐘可以產生65536個時鐘脈沖,而編碼器此時兩個上升沿之間的時鐘脈沖個數為M2=65個,則此時編碼器一個脈沖的時間
Tt = 65/(65536/1)=0.001s
則此時的轉速滿足:n = f0 / Z*M2
所以:n2 = 65536 / 512 * 65 = 1.97 r/s

小結:
T法M法計算的都是轉速,如果想要得到實際速度還需要知道車輪旋轉一周小車的前進距離。
但是對于智能車而言,實際速度的參考價值和單位時間內的脈沖數的參考價值一樣,都能反映出車身速度,這兩者之間也僅僅相差一個機械結構決定的比例。
所以怕麻煩的同學可以直接選取脈沖數作為速度量進行控制。數字測速方式還有一種M/T法測速,它可以很好地彌補T法和M發的缺點。
-
電機控制
+關注
關注
3537文章
1882瀏覽量
268964 -
運動控制
+關注
關注
4文章
584瀏覽量
32899 -
智能車
+關注
關注
21文章
403瀏覽量
76997
發布評論請先 登錄
相關推薦
什么是運動控制系統
運動控制系統的定義與機電系統運動控制教程分享








 工商網監
工商網監
評論