 滑模控制是什么 優缺點有哪些
滑模控制是什么 優缺點有哪些
- 滑模控制目的
對于滑模控制而言,我覺得我們先要明白其目的再來學習。
一開始我們對滑動控制的定義是:滑動模式是先使用受控系統產生兩個以上的子系統,然后再刻意加入一些切換條件產生滑動模式,以達成控制目標的一種技術。
滑模控制(sliding mode control, SMC)也叫變結構控制,其本質上是一類特殊的非線性控制,且非線性表現為控制的不連續性。
這種控制策略與其他控制的不同之處在于系統的“結構”并不固定,而是可以在動態過程中,根據系統當前的狀態(如偏差及其各階導數等)有目的地不斷變化,迫使系統按照預定“滑動模態”的狀態軌跡運動。
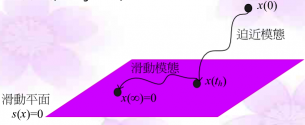
例如滑動模式控制中存在滑動曲面s=0,一開始時,系統會在有限時間內到達滑動曲面,之后就會沿著滑動曲面移動。
在滑動模式的理論敘述中,系統會約束在滑動曲面上,因此只需將系統視為在滑動曲面上滑動。
不過實際系統的實現是用高頻切換來讓系統近似在滑動曲面上滑動,高頻切換的控制信號讓系統在很鄰近滑動曲面的范圍內切跳(chatter),而且其頻率是不固定的。
雖然整體系統是非線性的,不過下圖中,當系統到達滑動曲面后,理想(沒有切跳)系統會限制在s=0的滑動曲面上,滑動曲面是線性時不變系統,在原點處指數穩定。
- 滑模控制優缺點
2.1 滑模控制的優點:
滑動模態可以設計且與對象參數和擾動無關,具有快速響應、對參數變化和擾動不靈敏( 魯棒性)、無須系統在線辨識、物理實現簡單。
2.2 滑模控制的缺點:
當狀態軌跡到達滑動模態面后,難以嚴格沿著滑動模態面向平衡點滑動,而是在其兩側來回穿越地趨近平衡點,從而產生抖振——滑模控制實際應用中的主要障礙。
國內外主要通過改進滑模趨近律達到減弱抖振的目的。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
滑模控制
+關注
關注
4文章
33瀏覽量
14050 -
控制信號
+關注
關注
0文章
167瀏覽量
12010
發布評論請先 登錄
相關推薦

機器視覺控制的優缺點有哪些
機器視覺控制是一種利用計算機視覺技術對機器進行控制的方法,它在工業自動化、機器人技術、智能交通等領域得到了廣泛應用。然而,機器視覺控制也存在一些優缺點。本文將詳細介紹機器視覺





 工商網監
工商網監
評論