 基于高光譜技術的褐土土壤總氮含量的預測2.0
基于高光譜技術的褐土土壤總氮含量的預測2.0
引言
土壤營養元素的含量是提高農作物產量和農產品品質的重要因素。對土壤營養元素進行準確測量是實施精細農業的基礎。傳統的土壤營養元素的測定方法為化學法,化學法測量結果精度高,但需要消耗大量的時間和人力,難以滿足土壤營養元素實時監控的要求。高光譜技術光譜分辨率高、光譜通道數多,能夠更加真實、全面地反映物體的固有光譜特性及其差異,從而能夠提高土壤營養元素的預測精度。高光譜技術已廣泛應用于土壤營養元素的預測與反演。
本文以山西典型褐土土壤為研究對象,所有土壤樣品經風干后,未經研磨過篩處理,直接裝入樣品杯進行測量。并采用高光譜成像技術獲取近紅 外高光譜圖像,并 提 取 平 均 光 譜 曲 線(A)、標準差曲線(S)和方差曲線(V)等統計參數。然后分別采用以平均光譜曲線(A)、平均光譜曲線的一階導數 (F)、A與F的乘積(A*F)、A與F的商(A/F)為基礎的20種光譜預處理方法,結合PLS方法進行建模,并對驗證集進行驗證。
本文旨在構建一種結 合高光譜成像技術特點的,針對未經研磨和過篩處 理的褐土土壤總氮含量的定量預測模型,并為土壤其他營養元素的快速預測提供參考。
結果與分析
2.1 不同PLS模型的建模結果
分別采用 A、F、A*F、A/F等20種光譜預處理方法,結合PLS方法進行建模,并對驗證集進行驗證。不同PLS模型及對驗證集的驗證結果見表3。不同光譜數據預處理方法對驗證集RPDc和Rc2的影響見圖3和圖4。
表3 不同 PLS模型及對驗證集的驗證結果
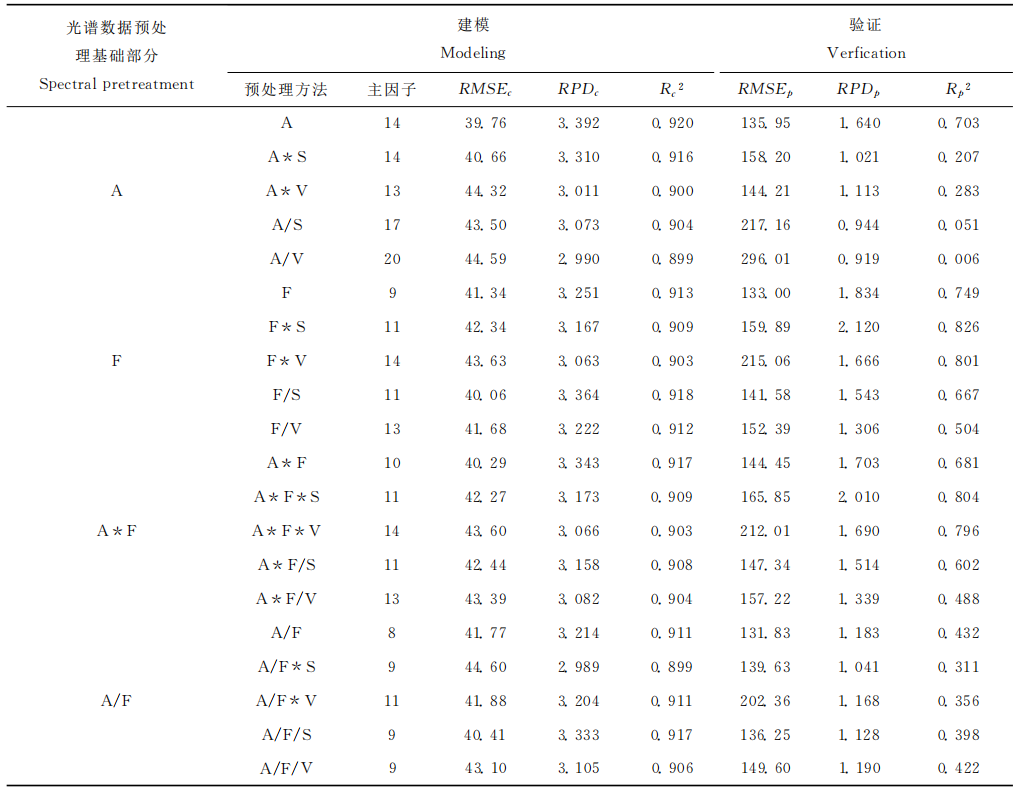
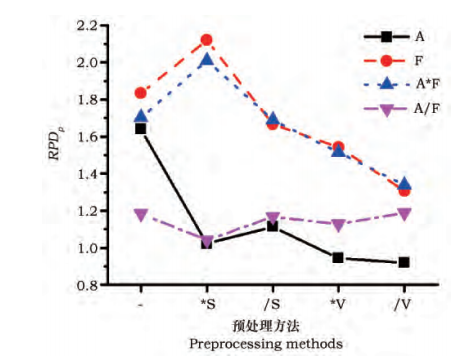
圖3 不同光譜數據預處理方法對RPDc的影響
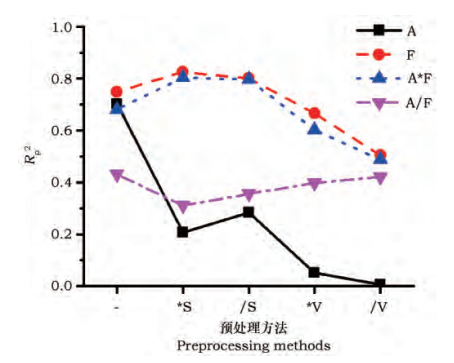
圖4不同光譜數據預處理方法對Rc2的影響
由于在建模時優先考慮了模型對建模集的驗證效果,并使所有模型的RPDc和Rc2基本相同,因此對模型進行評價只需要對比不同模型對驗證集的驗證效果即可。建模效果最好的預處理方法為F*S,其PLS模型的主因子個數為11,驗證集RMSEp=159.89,RPDp=2.120,Rp2=0.826;其次為A* F*S,其PLS模型的主因子個數為11,驗證集RMSEp=165.85,RPDp=2.010,Rp2=0.804。這兩個模型的RPDp在2.0以上,Rp2在0.8以上,可以對褐土土壤的總氮含量進行有效預測;其它模型的RPDp均小 于 2.0,對總氮含量的預測效果 較差。當只使用平 均光譜曲線A進行建模時,建模效果從好到壞依次為:F>A*F>A>A/F。即使用平均光譜曲線的一階導數F和平均光譜曲線與一階導數的乘積A*F能夠取得更好的建模效果。
當結合其它統計參數(S、V)進行建模時,以A和A/F為基礎的PLS模型的RPDp和Rp2均有大幅 下降,即A和 A/F不適合與S、V 組合進行建模。對于以F和A*F為基礎的PLS模型,只有與標準差的乘積(*S)能夠提高建模效果;而其他方法(/S、*V、/V)的建模效果均低于只使用F和A*F的建模效果。
討論與結論
本文以山西典型褐土土壤為研究對象,所有土壤樣品經風干后,未經研磨過篩處理,直接裝入樣品杯進行測量。并采用高光譜成像技術獲取近紅外高光譜圖像,并 提取平均光譜曲線(A)、標準差曲線(S)和方差曲線(V)等統計參數。然后分別采用以A、F、A*F、A/F為基礎的20種光譜預處理方法,結合PLS方法進行建模,并對驗證集進行驗證。
主要結論如下:
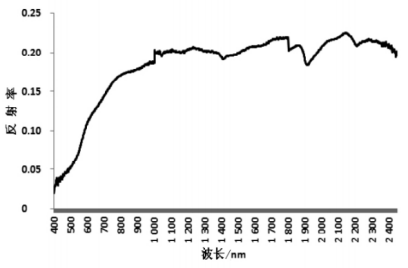
(1)平均光譜曲線隨總氮含量先增加后減小,可能導致兩個總氮含量差異極大的土壤樣本的平 均光譜曲線非常接近,從而影響預測模型的預測準 確性。一階導數曲線隨總氮含量的增加而單調增加,使用一階導數進行建模,可能能夠獲得更好的預測效果。
(2)建模效果最好的預處理方法為F*S,其PLS模型的主因子個數為11,驗證集RMSEp= 159.89,RPDp=2.120,Rp2=0.826;其次 為 A* F*S,其PLS模型的主因子個數為11,驗證集RMSEp=165.85,RPDp=2.010,Rp2=0.804。這兩個模型的RPDp在2.0以上,Rp2在0.8以上,可以對褐土土壤的總氮含量進行有效預測;其它模型的RPDp均小于2.0,對總氮含量的預測效果較差。
(3)當只使用平均光譜曲線A進行建模時,使 用平均光譜曲線的一階導數F和平均光譜曲線與一階導數的乘積A*F能夠取得更好的建模效果。當結合其它統計參數(S、V)進行建模時,只有F和A*F與標準差的乘積(*S)的預處理方法能夠提高建模效果。
本文選用的土壤樣本未經研磨和過篩處理,能夠極大縮短制樣時間,提高預測效率。本文結合高光譜成像技術的特點,提出了多種統計參數結合的光譜數據的預處理方法,可為高光譜成像技術的土壤營養元素的反演提供參考。本文研究結果可為 近紅外高光譜成像技術應用于褐土土壤其他營養成份的快速預測提供參考。光譜數據預處理方法 對其他建模方式、其他土壤類型、其他營養元素的反演有待進一步研究。
推薦:
無人機高光譜成像系統iSpecHyper-VM100
一款基于小型多旋翼無人機高光譜成像系統,該系統由高光譜成像相機、穩定云臺、機載控制與數據采集模塊、機載供電模塊等部分組成。無人機機載高光譜成像系統通過獨特的內置式或外部掃描和穩定控制,有效地解決了在微型無人機搭載推掃式高光譜照相機時,由于振動引起的圖像質量較差的問題,并具備較高的光譜分辨率和良好的成像性能。

審核編輯 黃宇
-
模型
+關注
關注
1文章
3261瀏覽量
48914 -
無人機
+關注
關注
230文章
10461瀏覽量
180997 -
高光譜
+關注
關注
0文章
334瀏覽量
9961
發布評論請先 登錄
相關推薦
土壤肥料養分速測儀的技術指標

土壤氮磷鉀檢測儀是如何檢測土壤中的養分
土壤氮磷鉀檢測儀的特點是什么
土壤氮磷鉀檢測儀的詳細介紹
土壤氮磷鉀檢測儀研究氮磷鉀對土壤的作用
土壤養分檢測儀檢測土壤氮磷鉀含量
原位總磷總氮分析儀的檢測原理是什么?
地物光譜儀:水稻高光譜與葉綠素含量研究






 工商網監
工商網監
評論