") 機(jī)器人里程計(jì)數(shù)據(jù)可視化
機(jī)器人里程計(jì)數(shù)據(jù)可視化
STM32端返回的x軸線速度、y軸線速度是相對(duì)于自身的機(jī)體坐標(biāo)系的速度,而機(jī)器人的位置信息是相對(duì)于世界坐標(biāo)系的位置,所以在對(duì)速度進(jìn)行積分前, 要先將機(jī)體坐標(biāo)系下的x軸線速度、y軸線速度轉(zhuǎn)換到世界坐標(biāo)系 ,如圖:
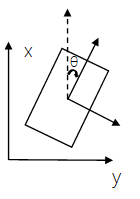
這個(gè)坐標(biāo)變換可以通過(guò)一個(gè)簡(jiǎn)單的旋轉(zhuǎn)矩陣來(lái)實(shí)現(xiàn)

其中θ就是機(jī)器人的偏航角。相應(yīng)的程序如下:
/* 對(duì)速度進(jìn)行積分得到位移 */
// 獲取當(dāng)前時(shí)間
current_time = ros::Time::now();
// 獲取積分間隔
double dt = (current_time - last_time).toSec();
last_time = current_time;
// 將機(jī)體系速度轉(zhuǎn)換到里程計(jì)坐標(biāo)系
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
// 速度積分
x += delta_x;
y += delta_y;
在機(jī)器人中,一般使用四元數(shù)/旋轉(zhuǎn)矩陣的形式來(lái)表示機(jī)器人的姿態(tài),而不是歐拉角形式。所以需要將STM32返回的偏航角轉(zhuǎn)換為四元數(shù),程序如下:
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
以上就獲取了完整的機(jī)器人里程計(jì)數(shù)據(jù),接下來(lái)需要將里程計(jì)數(shù)據(jù)發(fā)布到ROS中。
nav_msgs::Odometry odom;
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
// 發(fā)布坐標(biāo)變換
odom_broadcaster.sendTransform(odom_trans);
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
odom.child_frame_id = "base_link";
// 設(shè)置機(jī)器人的位置和姿態(tài)
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
// 設(shè)置機(jī)器人的速度
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
// 發(fā)布里程計(jì)消息
odom_pub.publish(odom);
運(yùn)行后,打開(kāi)PC上的Ubuntu,配置ip從而實(shí)現(xiàn)遠(yuǎn)程連接嵌入式處理器上的ROS系統(tǒng),參照:ROS多機(jī)通信(https://blog.csdn.net/qq_42688495/article/details/115260247)
配置完成后,重新打開(kāi)一個(gè)終端,輸入:rviz,打開(kāi)ROS的可視化工具,按照下圖操作即可

可視化結(jié)果如下:

最后將該rviz配置保存至文件,點(diǎn)擊File→Save Config As,將配置保存為xxxx.rviz。下次打開(kāi)時(shí),在命令行運(yùn)行:rosrun rviz rviz -d xxxx.rviz即可。
-
機(jī)器人
+關(guān)注
關(guān)注
211文章
28466瀏覽量
207309 -
STM32
+關(guān)注
關(guān)注
2270文章
10904瀏覽量
356338 -
ROS
+關(guān)注
關(guān)注
1文章
278瀏覽量
17022
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
可視化機(jī)器人
出租車(chē)行駛里程計(jì)數(shù)
關(guān)于機(jī)器人定位與建圖,這些小技巧你懂嗎
采用MATLAB設(shè)計(jì)下的可視化與控制
服務(wù)型智能掃地機(jī)器人的主要功能有哪些呢
如何去實(shí)現(xiàn)一種送餐機(jī)器人產(chǎn)品設(shè)計(jì)
機(jī)器人焊裝工位的可視化仿真研究
使用Python可視化數(shù)據(jù),機(jī)器人開(kāi)發(fā)編程
如何設(shè)計(jì)液壓式雙足機(jī)器人運(yùn)動(dòng)數(shù)據(jù)可視化系統(tǒng)
輪式移動(dòng)機(jī)器人里程計(jì)分析
介紹一種基于編碼器合成里程計(jì)的方案
ROS機(jī)器人導(dǎo)航調(diào)參手冊(cè)

機(jī)器人里程計(jì)數(shù)據(jù)的上傳與接收






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論