

0、步態(tài)規(guī)劃
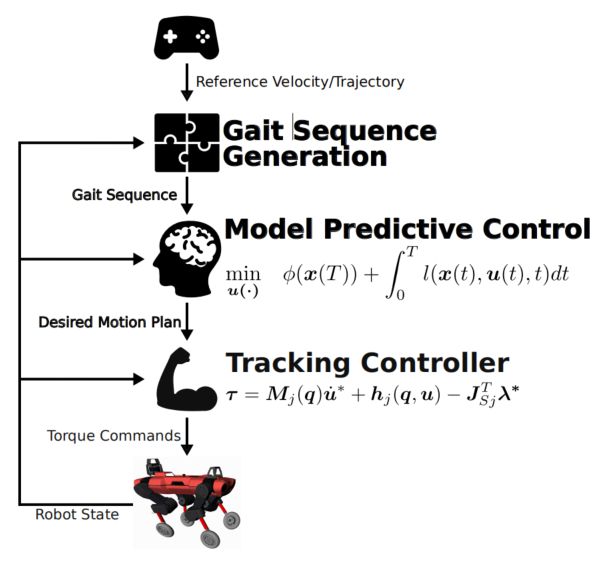
四足機(jī)器人控制當(dāng)中,步態(tài)是至關(guān)重要的一項。我們可以簡單理解成四足機(jī)器人運動過程中各腿的狀態(tài),在這套設(shè)計方案中,我們對步態(tài)的規(guī)劃主要分成兩大主要部分,即接觸狀態(tài)和周期函數(shù)。而步態(tài)規(guī)劃的目的,就是創(chuàng)建一個關(guān)于的足端接觸狀態(tài)的周期函數(shù)。
1、接觸狀態(tài)
四足機(jī)器人行進(jìn)過程中,根據(jù)足端與地面是否發(fā)生接觸,我們可以規(guī)定各條腿的兩種接觸狀態(tài),即接觸(contact)與擺動(swing)
總控制器會根據(jù)步態(tài)規(guī)劃給出的狀態(tài),移交至對應(yīng)的控制器去處理,即擺動腿控制器(swing leg controll),接觸腿控制器(contact leg control)。
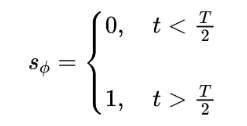
對于這兩種狀態(tài),可以簡單地用一個布爾類型的值s來定義,即

對于周期性的步態(tài)規(guī)劃,我們可以用下標(biāo)Φ來進(jìn)行區(qū)分,可以寫成:

2、步態(tài)周期
四足機(jī)器人的運動歸根到底都是周期運動,我們無須量化機(jī)器人運動的整個過程,因此如何量化定義一個完整的步態(tài)周期顯得極為重要,在此我們使用基于時間的周期函數(shù),定義一個基準(zhǔn)相位值,公式如下:
其中,
- t:當(dāng)前運行時間
- t0:當(dāng)前周期開始時間
- T:一個步態(tài)周期
同樣我們可以利用取余的方法來簡化上述周期函數(shù),兩者并無實質(zhì)的區(qū)別:
其中
- %為取余運算
- t為當(dāng)前運行時間
對于相同類型的周期信號,我們可以利用相位差來表征周期函數(shù)之間的差別,因此有了基準(zhǔn)相位函數(shù)之后,我們就可以利用其來定義各條腿的相位,如下式:
其中,Φi,offset為第條腿與基準(zhǔn)相位的相位差。
-
控制器
+關(guān)注
關(guān)注
114文章
16886瀏覽量
182489 -
機(jī)器人
+關(guān)注
關(guān)注
212文章
29328瀏覽量
211094 -
四足機(jī)器人
+關(guān)注
關(guān)注
1文章
94瀏覽量
15397
發(fā)布評論請先 登錄
stm32紅外六足機(jī)器人
【Embedded Pi申請】六足機(jī)器人的創(chuàng)新研發(fā)
labview如何實現(xiàn)六足機(jī)器人的三足步態(tài)的編程程序
四足仿生機(jī)器人
四足機(jī)器人
四足機(jī)器人的機(jī)構(gòu)設(shè)計
基于靜態(tài)平衡的四足機(jī)器人斜面步態(tài)規(guī)劃張文宇
平面液壓雙足機(jī)器人步態(tài)規(guī)劃及阻抗控制研究說明
怎么樣實現(xiàn)雙足機(jī)器人參數(shù)化步態(tài)規(guī)劃詳細(xì)方法說明
如何實現(xiàn)雙足機(jī)器人爬樓梯的步態(tài)規(guī)劃與參數(shù)優(yōu)化
腿+輪式動力!瑞士四足機(jī)器人展示最佳混合步態(tài)、運動更靈活
四足機(jī)器人接觸檢測和模型





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論