 關于模擬仿真測試可信度評估方法的研究(上)——評估框架
關于模擬仿真測試可信度評估方法的研究(上)——評估框架
引言
隨著智能網聯汽車技術及產業的快速發展,預期功能安全等新的安全風險也日益凸顯,傳統的測試手段已無法滿足對自動駕駛功能測試與驗證的需求。模擬仿真測試技術以其高效率、低成本、高安全、高覆蓋度等優勢,成為自動駕駛功能測試驗證的重要支柱[1],已得到業內廣泛認可。基于賽目科技前期提出的智能網聯汽車產品測試策略研究成果,本篇文章提出模擬仿真測試可信度評估框架及一系列評估方法,為后續開展仿真測試可信度評估提供參考。
本系列文章將分上、下兩篇,分別闡釋賽目科技提出的模擬仿真測試可信度“評估框架”和“評估方法”兩個核心問題。
可信度評估框架
聯合國世界車輛法規協調論壇(UN/WP.29)自動駕駛驗證方法非正式工作組(VMAD IWG)針對自動駕駛功能提出新評估和測試方法(New Assessment/Test Method for Automated Driving,NATM)[2],包括場景目錄,以及模擬仿真測試、封閉場地測試、實際道路測試、審核評估和在用監測報告等5類技術手段(以下簡稱“多支柱法”),支撐ADS的安全性驗證,如圖1所示。
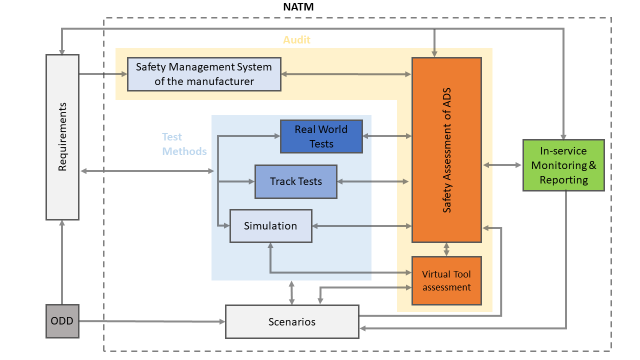
圖1 VMAD多支柱法框架
其中,仿真作為“多支柱法”的重要內容,在智能網聯汽車綜合安全評估中發揮著至關重要的作用。對此,NATM中針對仿真測試提出了可信度評估框架與流程,主要包含仿真試驗的管理、分析、驗證和確認四大組成部分,如圖2所示。
·建模和仿真管理:數據譜系、團隊經驗、發布管理。
·建模和仿真分析:邏輯場景、關鍵性評估、工具鏈范圍/說明、假設和限制、相關性閾值。
·建模和仿真驗證:代碼驗證、計算驗證、敏感性分析。
·建模和仿真確認:相關系統(如傳感器、車輛及其他子系統)、集成系統。
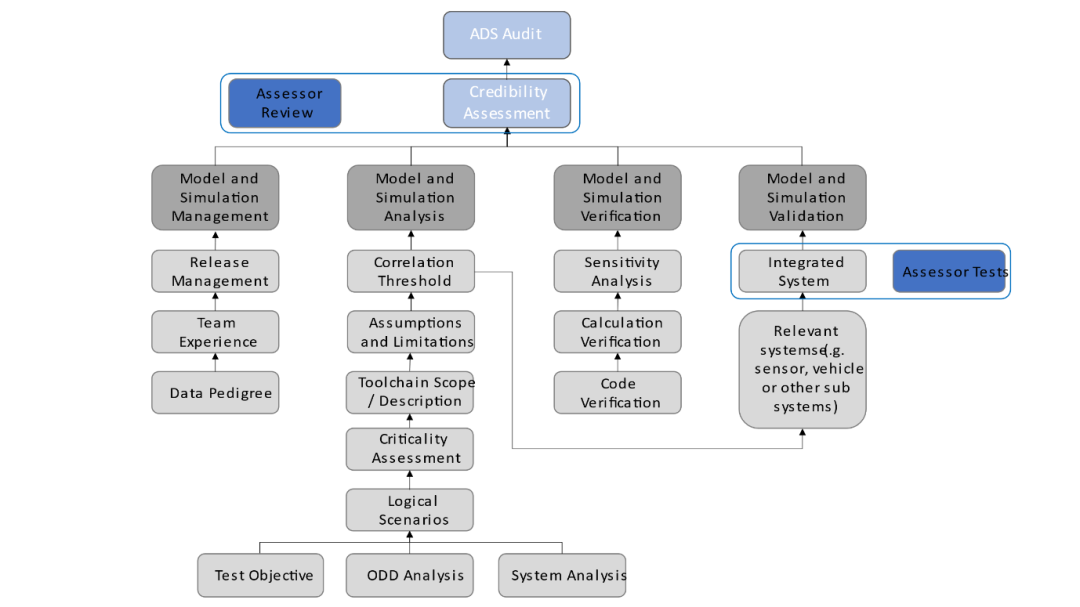 圖2 仿真試驗可信度評估框架
國內針對仿真測試的標準化研究,《自動駕駛功能仿真測試標準化需求研究報告》中指出模擬仿真測試應遵循的基本原則為全面性、真實性和可重復性,其中,真實性是指仿真測試的場景參數應基于實際,邏輯參數設置合理,并且測試輸出結果應與實車測試保持基本一致[3]。2022年11月,工信部聯合公安部發布的《關于開展智能網聯汽車準入和上路通行試點工作的通知(征求意見稿)》中針對仿真測試驗證也明確要求:應證明使用的模擬仿真測試工具鏈置信度,以及車輛動力學、傳感器等模型可信度,并通過與封閉場地和實際道路測試結果對比等手段驗證模擬仿真測試的可信度[4]。
基于以上研究背景,我們得出模擬仿真測試的實現需要模型、工具和場景共同作用,三者緊密耦合,相輔相成。因此賽目科技提出一種模擬仿真測試可信度評估框架,其中主要包括仿真工具置信度、仿真模型可信度以及測試場景可信度,如圖3所示。
圖2 仿真試驗可信度評估框架
國內針對仿真測試的標準化研究,《自動駕駛功能仿真測試標準化需求研究報告》中指出模擬仿真測試應遵循的基本原則為全面性、真實性和可重復性,其中,真實性是指仿真測試的場景參數應基于實際,邏輯參數設置合理,并且測試輸出結果應與實車測試保持基本一致[3]。2022年11月,工信部聯合公安部發布的《關于開展智能網聯汽車準入和上路通行試點工作的通知(征求意見稿)》中針對仿真測試驗證也明確要求:應證明使用的模擬仿真測試工具鏈置信度,以及車輛動力學、傳感器等模型可信度,并通過與封閉場地和實際道路測試結果對比等手段驗證模擬仿真測試的可信度[4]。
基于以上研究背景,我們得出模擬仿真測試的實現需要模型、工具和場景共同作用,三者緊密耦合,相輔相成。因此賽目科技提出一種模擬仿真測試可信度評估框架,其中主要包括仿真工具置信度、仿真模型可信度以及測試場景可信度,如圖3所示。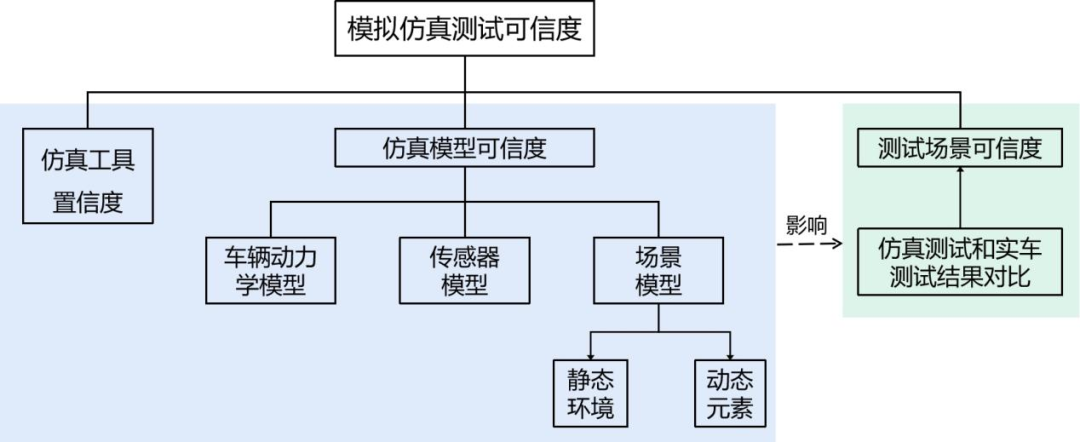 圖3 模擬仿真測試可信度評估框架
圖3 模擬仿真測試可信度評估框架仿真工具置信度
仿真測試工具包含場景管理模塊、仿真引擎、評價模塊等,通過搭建智能網聯汽車仿真測試所需的測試環境,反饋相關感知信息及車控指令,并形成自動駕駛算法模擬仿真測試評估結果,是完成自動駕駛模擬仿真測試的重要手段。仿真工具的置信度要求是仿真工具本身不應出現計算錯誤、算法邏輯變更、超預期的信號時序變更、同步狀態改變等問題[1],通過功能安全實現以上要求是主要的途徑之一。參考ISO 26262 [5]汽車功能安全標準中汽車軟件產品開發的要求,需要從設計開發到測試驗證進行全流程的安全評估保障,主要工作包括:需求分析、系統架構設計、詳細設計、單元測試、集成測試、功能測試,以驗證仿真工具具備的置信度水平,具體流程如圖4所示。
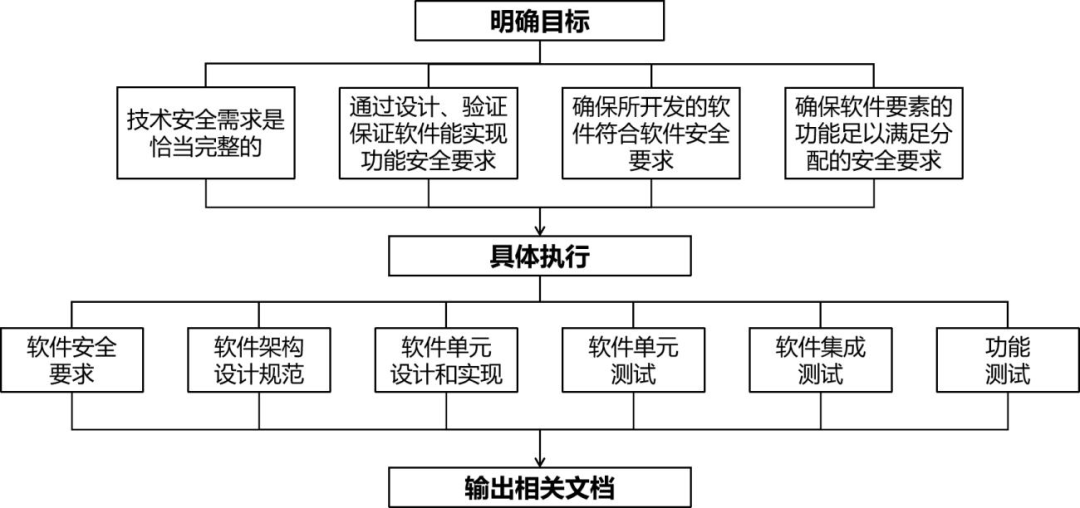 圖4 仿真工具可信度評估框架仿真模型可信度
圖4 仿真工具可信度評估框架仿真模型可信度(1)車輛動力學模型
車輛動力學模型是汽車仿真技術的重要組成部分,主要作用是模擬車輛在不同行駛狀態時的動力學行為[4],根據ADAS或者自動駕駛系統的輸入,結合路面特性對車輛本身進行仿真,完成閉環的測試。 針對車輛動力學模型的可信度驗證,賽目科技提出“試驗工況+對比參數”的驗證框架,主要通過配置車輛動力學參數、構建典型試驗工況、選取對比參數,進行仿真與實車測試結果的比對,具體流程如圖5所示。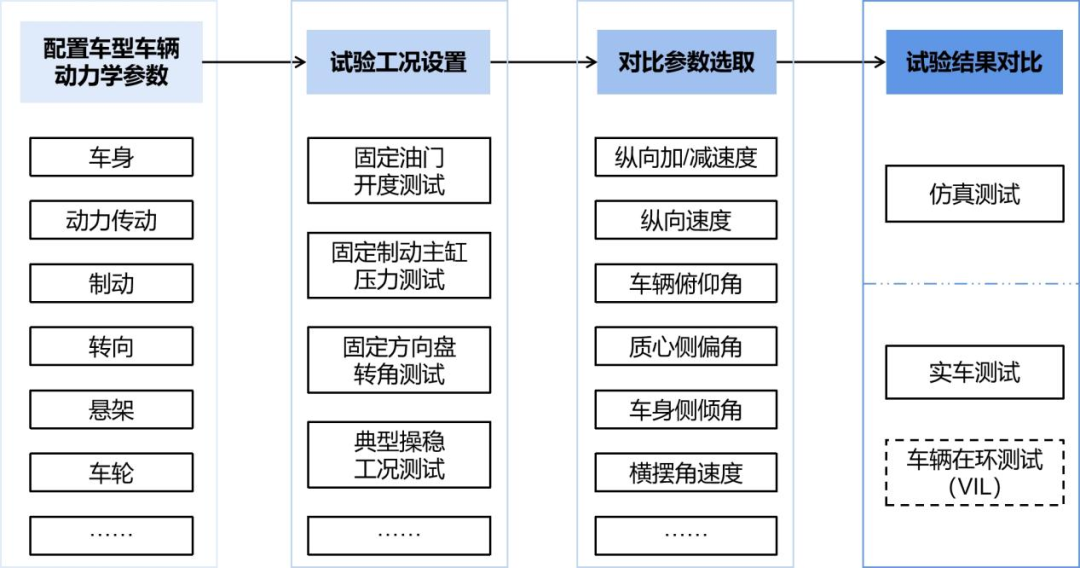
圖5 車輛動力學模型可信度評估框架
(2)傳感器模型
傳感器建模是其在仿真環境中感知周圍對象信息的必要環節,可以實現對感知算法效果的驗證與評估。傳感器模型配置主要是對攝像頭、毫米波雷達、激光雷達、超聲波雷達的物理特性根據仿真測試需求進行建模。 針對傳感器模型的可信度驗證,賽目科技提出“測試環境構建+對比參數”的驗證框架,主要通過設置傳感器參數、選取對比參數、構建典型場景,進行仿真與真實傳感器反饋結果的比對,具體流程如圖6所示。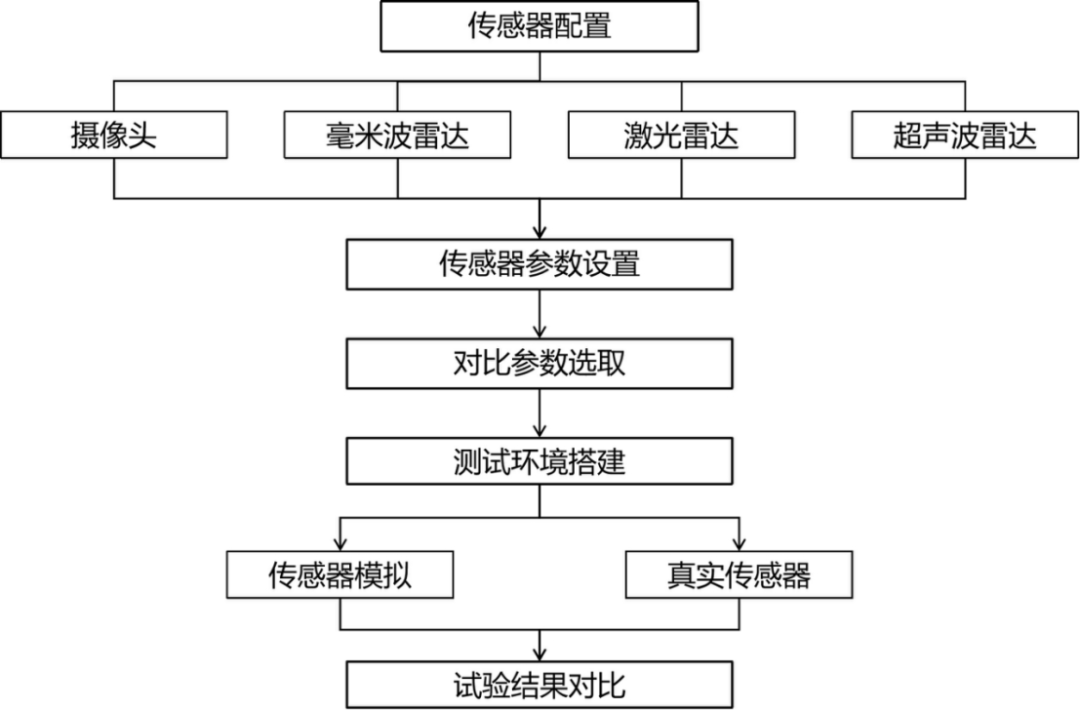
圖6 傳感器模型可信度評估框架
測試場景可信度
在自動駕駛模擬仿真測試過程中,場景作為最重要的核心要素之一,可以部署到仿真環境或者真實的受控測試場地中,從而對被測車輛的特定功能在行駛環境下的表現進行試驗和分析[6]。針對測試場景的可信度驗證,賽目科技提出通過選取對比參數、實車標定試驗、搭建測試場景,進行仿真與實車試驗結果的比對,具體流程如圖7所示。
·標準規范:參考GB/T《智能網聯汽車 自動駕駛功能仿真試驗方法及要求》(草案)和GB/T 41798-2022《智能網聯汽車 自動駕駛功能場地試驗方法及要求》[7]。
·試驗場景:根據自動駕駛功能的設計運行條件確定可信度驗證的測試場景集。
·試驗參數:根據測試場景中是否存在交互行為選取各場景下的對比試驗參數。
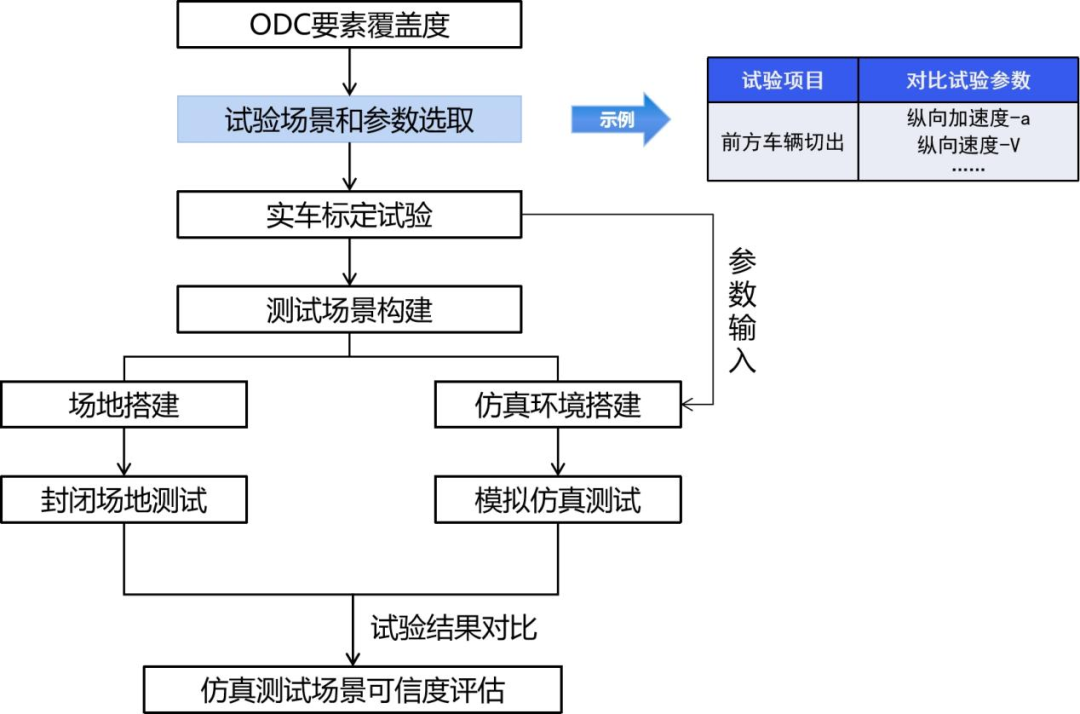
圖7 仿真測試場景可信度評估流程
開展仿真測試與實車測試結果的一致性分析,主要體現為:智能網聯汽車在同一測試場景下,模擬仿真測試和實車測試的試驗結果趨勢應保持一致,特征參數(如縱向速度、縱向加/減速度等)誤差在一定范圍內,從而驗證仿真測試場景的可信度。
結語
本文是《模擬仿真測試可信度評估方法研究》系列的上篇,主要描述了仿真測試可信度評估的“評估框架”,主要包括仿真工具置信度、仿真模型可信度以及測試場景可信度。通過建立仿真可信度評估研究框架,有利于從總體上把握可信度評估的基本步驟和方法,有效推進可信度評估研究和實踐。
下一期《模擬仿真測試可信度評估方法研究》下篇將重點介紹仿真測試可信度評估的“評估方法”,賽目科技對比分析并提出了一種定量的可信度評估指標,敬請期待。
參考文獻
[1]劉法旺,何豐,周時瑩等.基于場景的智能網聯汽車模擬仿真測試評估方法與實踐[J].汽車工程學報,2023,13(02):135-145.
[2]New Assessment/Test Method for Automated Driving (NATM) Guidelines for Validating Automated Driving System (ADS). Informal Working Group (IWG) on Validation Methods for Automated Driving (VMAD),2022.
[3]自動駕駛功能仿真測試標準化需求研究報告[R].全國汽車標準化技術委員會,智能網聯汽車分技術委員會,2020.
[4]工業和信息化部和公安部.《關于開展智能網聯汽車準入和上路通行試點工作的通知(征求意見稿)》, 2022.
[5]ISO 26262Road vehicles -- Functional safety
[6]馮屹,王兆.自動駕駛測試場景技術發展與應用[M].北京:機械工業出版社, 2020.
[7]GB/T 41798-2022 智能網聯汽車 自動駕駛功能場地試驗方法及要求[S].
掃描二維碼
關注賽目科技
 ?
?專注智能網聯汽車
測試丨驗證丨評價研究
作者:前瞻事業部-鞠曉男
原文標題:關于模擬仿真測試可信度評估方法的研究(上)——評估框架
文章出處:【微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
-
賽目科技
+關注
關注
0文章
41瀏覽量
786
原文標題:關于模擬仿真測試可信度評估方法的研究(上)——評估框架
文章出處:【微信號:gh_c85a8e3c0f2a,微信公眾號:賽目科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦

告別傳統校準!GNSS模擬器在計量行業的應用

MPU的性能評估方法
DAC8820評估板可以輸出模擬信號生成波形嗎?
用于SLAM中點云地圖綜合評估的開源框架
光伏逆變器負載何進行負載測試和性能評估?
使用ADS仿真了評估板的模擬輸入電路,發現S11,S22,S12,參數異常,為什么?
多通道負載測試和性能評估?

如何評估AI大模型的效果
基于FPA的軟件工作量綜合評估研究與實踐
車輛動力學仿真模型的可信度評估方法

如何進行RF PA Ruggedness的測試和評估呢?






 工商網監
工商網監
評論