 EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(二):EtherCAT總線初始化
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(二):EtherCAT總線初始化
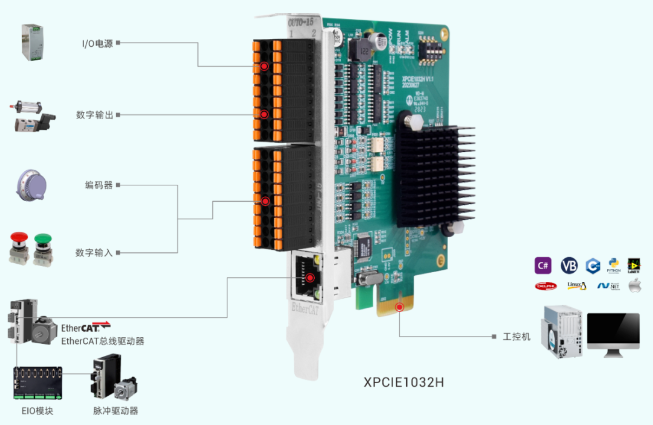
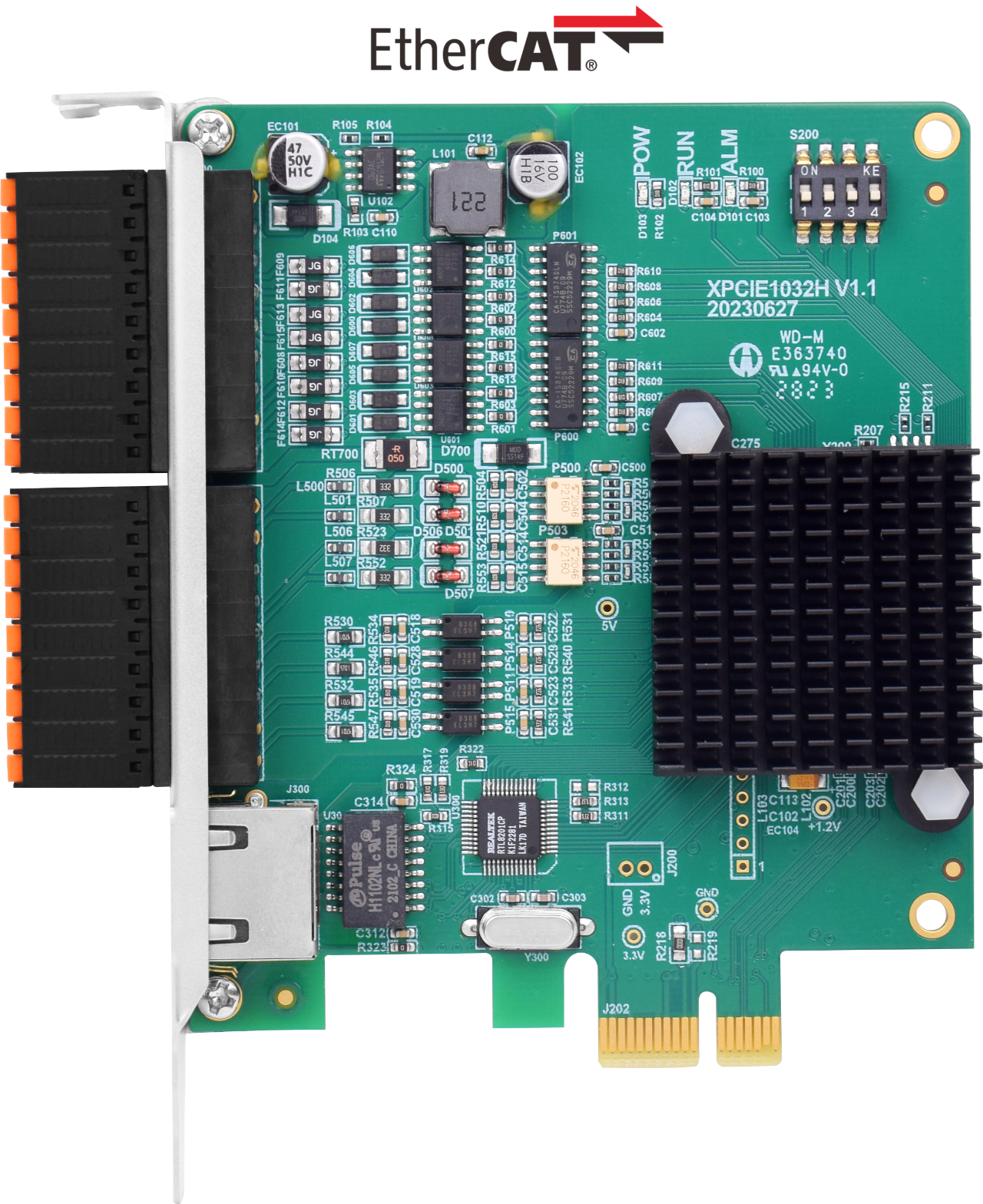
XPCIE1032H功能簡介
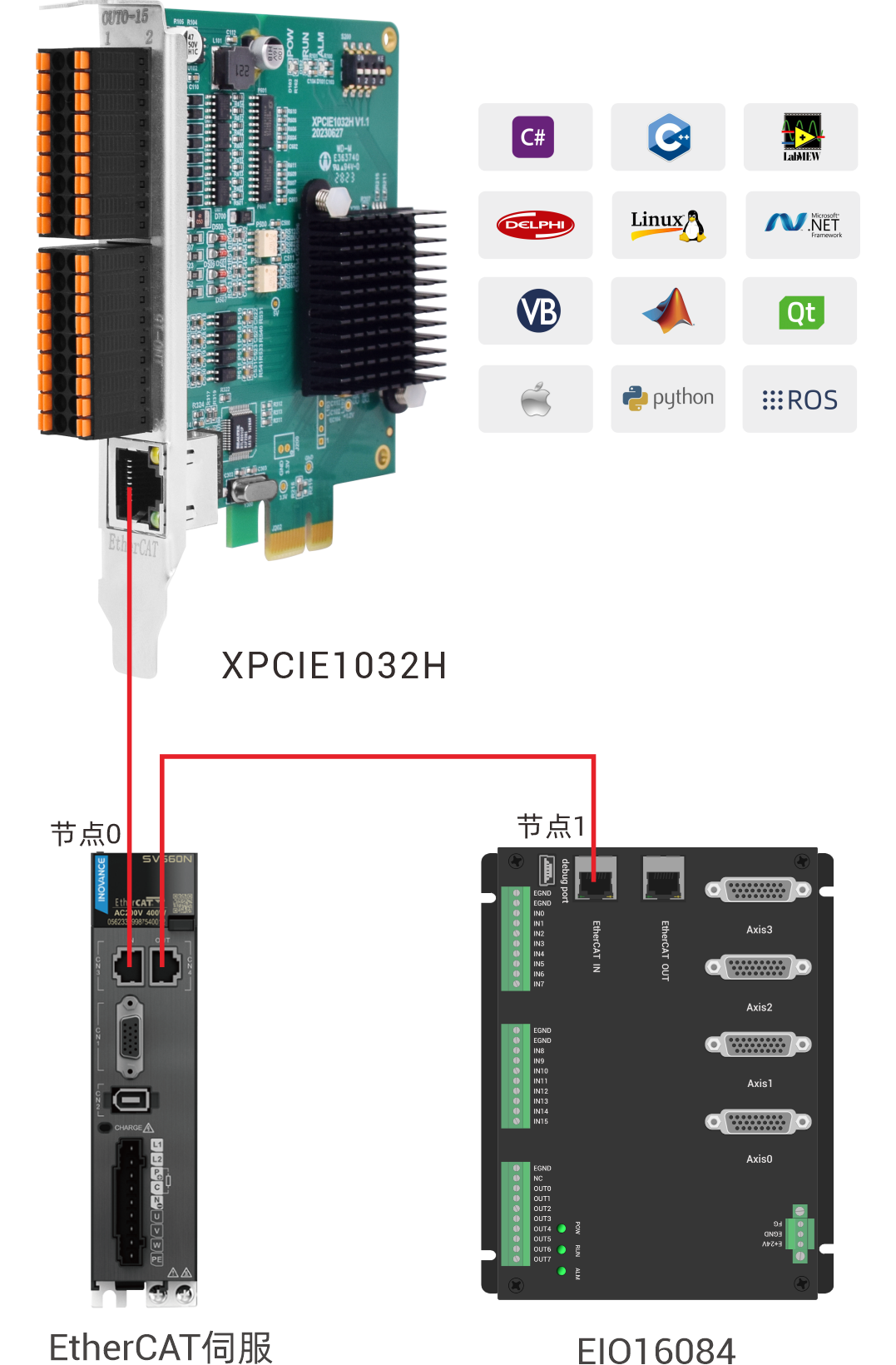
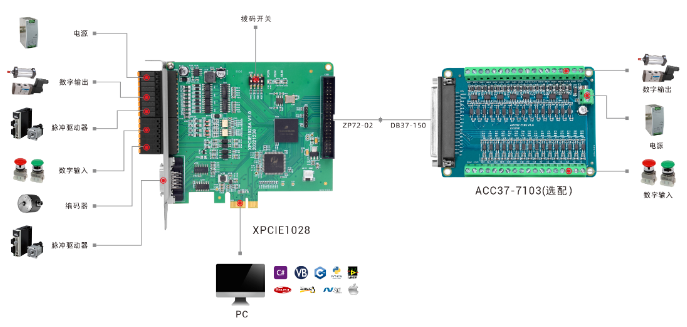
XPCIE1032H是一款基于PCI Express的EtherCAT總線運動控制卡,可選6-64軸運動控制,支持多路高速數字輸入輸出,可輕松實現多軸同步控制和高速數據傳輸。XPCIE1032H集成了強大的運動控制功能,結合MotionRT7運動控制實時軟核,解決了高速高精應用中,PC Windows開發的非實時痛點,指令交互速度比傳統的PCI/PCIe快10倍。
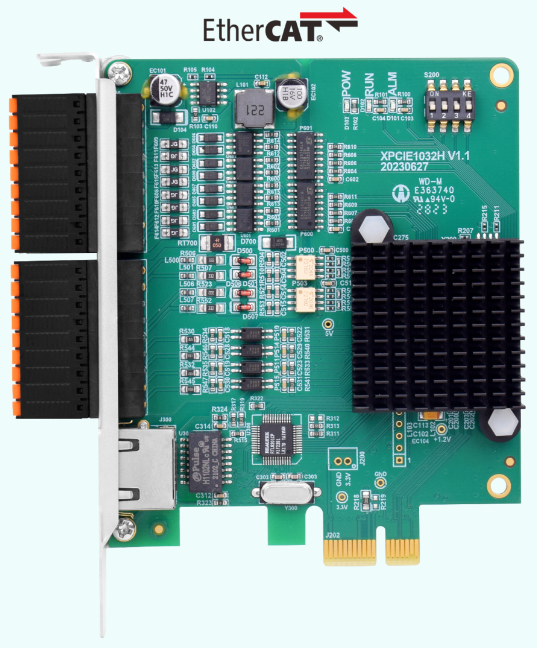
XPCIE1032H 支持PWM,PSO功能,板載16進16出通用IO口,其中輸出口全部為高速輸出口,可配置為4路PWM輸出口或者16路高速PSO硬件比較輸出口。輸入口含有8路高速輸入口,可配置為4路高速色標鎖存或兩路編碼器輸入。
XPCIE1032H搭配MotionRT7實時內核,使用本地LOCAL接口連接,通過高速的核內交互 ,可以做到更快速的指令交互,單條指令與多條指令一次性交互時間可以達到3-5us左右。
?XPCIE1032H與MotionRT7實時內核的配合具有以下優勢:
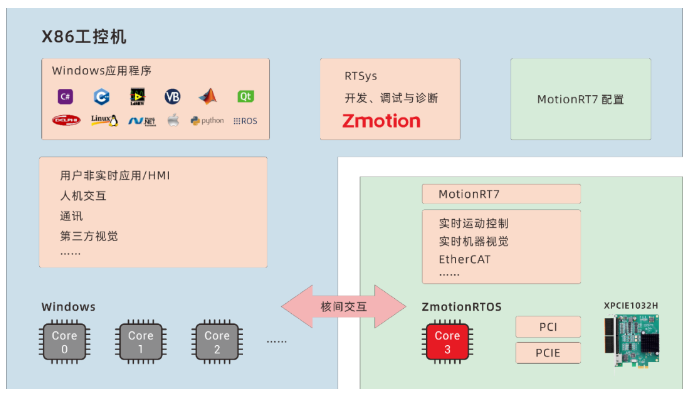
1.支持多種上位機語言開發,所有系列產品均可調用同一套API函數庫;
2.借助核內交互,可以快速調用 運動指令,響應時間快至微秒級,比傳統PCI/PCIe快10倍;
3.解決傳統PCI/PCIe運動控制卡在Windows環境下控制系統的非實時性問題;
4.支持一維/二維/三維PSO(高速硬件位置比較輸出),適用于視覺飛拍、精密點膠和激光能量控制等應用;
5.提供高速輸入接口,便于實現位置鎖存;
6.支持EtherCAT總線和脈沖輸出混合聯動、混合插補。

?使用XPCIE1032H和MotionRT7進行項目開發時,通常需要進行以下步驟:
1.安裝驅動程序,識別XPCIE1032H;
2.打開并執行文件“MotionRT710.exe”,配置參數和運行運動控制實時內核;
3.使用ZDevelop軟件連接到控制器,進行參數監控。連接時請使用PCI/LOCAL方式,并確保ZDevelop軟件版本在3.10以上;
4.完成控制程序開發,通過LOCAL鏈接方式連接到運動控制卡,實現實時運動控制。

?與傳統PCI/PCIe卡和PLC的測試數據結果對比:

我們可以從測試對比結果看出,XPCIE1032H運動控制卡配合實時運動控制內核MotionRT7,在LOCAL鏈接(核內交互)的方式下,指令交互的效率是非常穩定,當測試數量從1w增加到10w時,單條指令交互時間與多條指令交互時間波動不大,非常適用于高速高精的應用。
XPCIE1032H卡安裝
關閉計算機電源。
打開計算機機箱,選擇一條空閑的XPCIE卡槽,用螺絲刀卸下相應的擋板條。
將運動控制卡插入該槽,擰緊擋板條上的固定螺絲。
XPCIE1032H驅動安裝與建立連接參考往期文章EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(一):驅動安裝與建立連接。
一、新建C#項目(VS2022)

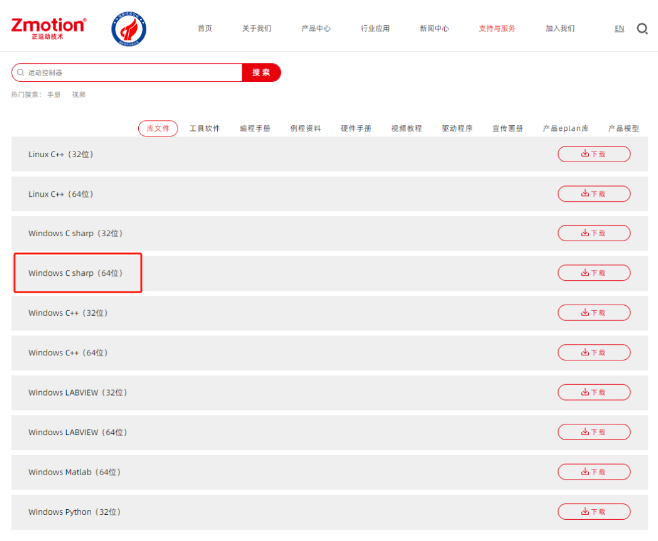
解壓下載的安裝包找到 “ Zmcaux.cs ” , “ zauxdll.dll ” , “ zmotion.dll ” 放入到項目文件中。
1、“Zmcaux.cs”放在項目根目錄文件中,與bin目錄同級。
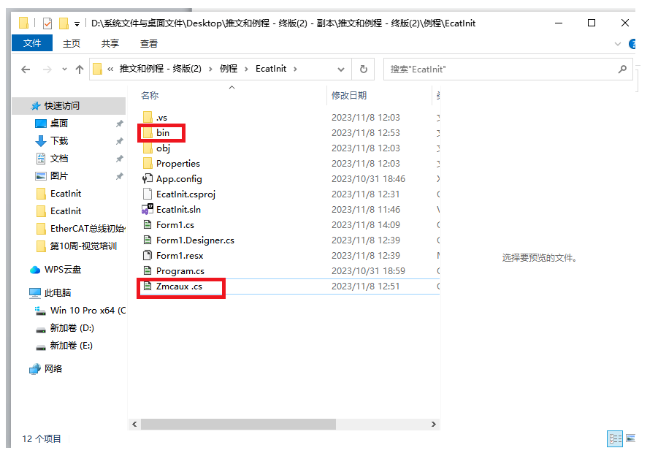
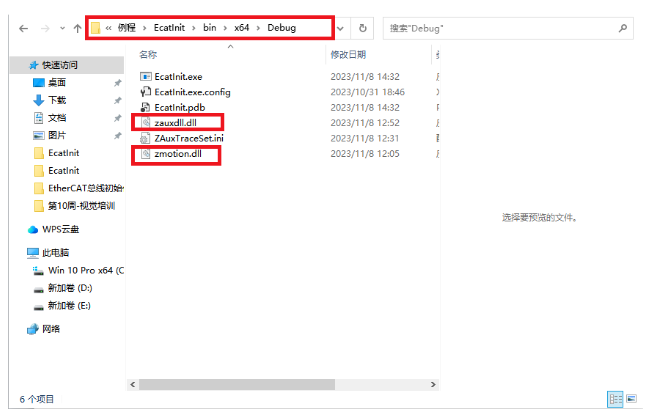
2、“zauxdll.dll”,“zmotion.dll”放在bin -> Debug。
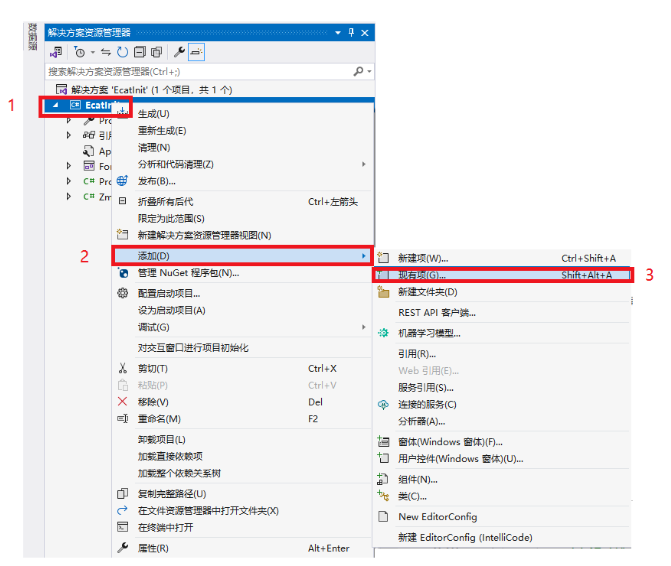
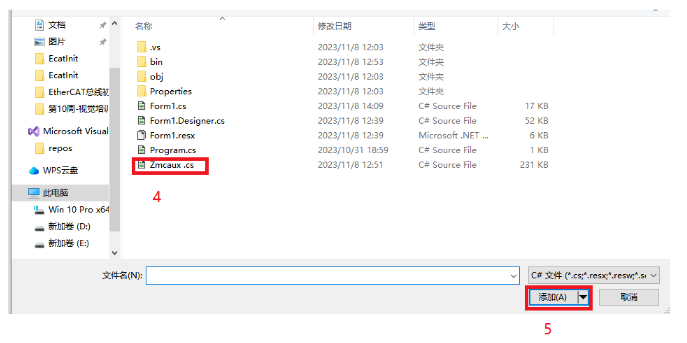
用vs打開新建的項目文件,在右邊的解決方案資源管理器中點擊顯示所有,選中項目,右鍵“添加”->“現有項”,選中zmcaux.cs文件添加進在項目中。
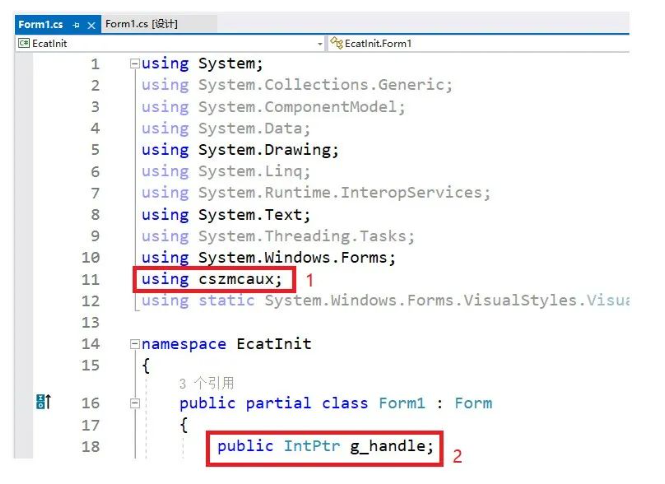
雙擊Form1.cs里面的Form1,出現代碼編輯界面,在文件開頭寫入using cszmcaux,并聲明控制器句柄g_handle。
二、相關PC函數介紹
相關PC函數介紹詳情可參考“ZMotion PC函數庫編程手冊 V2.1.1”。

其他基本軸參數指令:

在form設計界面找到需要用到的控件拖拽到窗體中進行UI界面設計,設計效果圖如下。
三、相關程序以及設計思路
1、通過LOCAL鏈接方式,按鈕控件的的click事件觸發鏈接控制卡。
private void Local_Connect_Button_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
Local_DisConnect_Button_Click(sender, e);
}
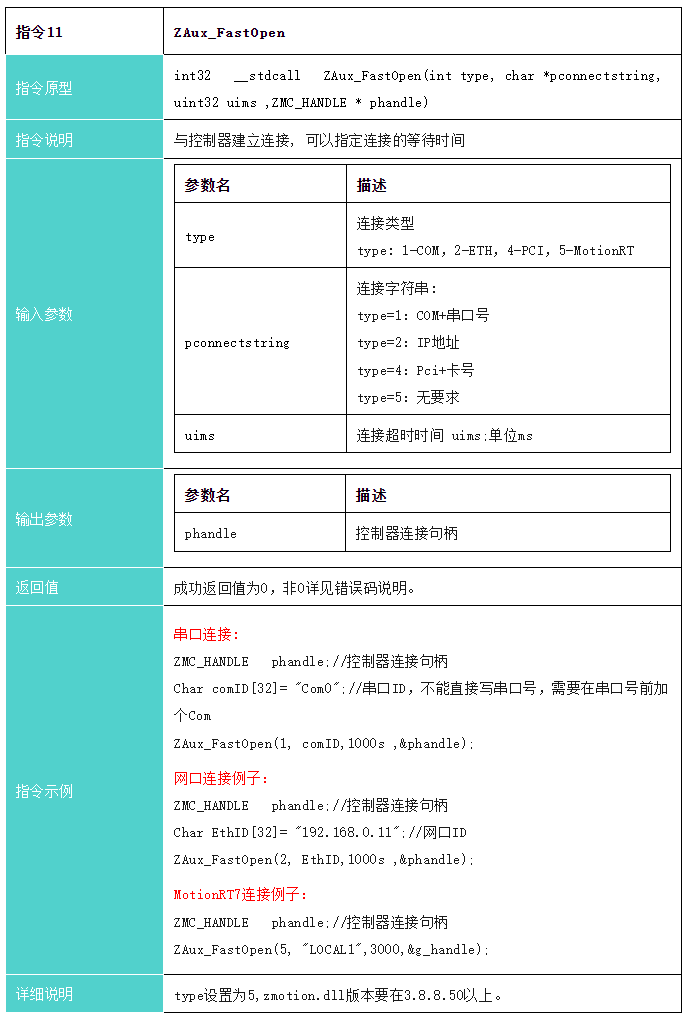
zmcaux.ZAux_FastOpen(5, "local", 1000, out g_handle);
if (g_handle != (IntPtr)0)
{
this.Text = "已鏈接";
timer1.Enabled = true;
Local_Connect_Button.BackColor = Color.Green;
MessageBox.Show("鏈接成功");
}
else
{
MessageBox.Show("鏈接失敗,請選擇正確的LOCAL!");
}
}
2、選擇總線初始化的bas腳本文件下載到控制器rom里面掉電保存。
提前在zdevelop軟件根據需求修改總線初始化的basic程序,映射軸,節點IO等初始化內容。這里以節點0(匯川驅動器-0軸)、節點1(EIO16084)的1-4軸映射為總線軸為例,將節點之間通過ETHERCAT口連接起來。如下圖:
相關初始化basic 程序(其中紅色為指令,可以到正運動官網查閱其使用場景以及方法)。
相關配置如下:
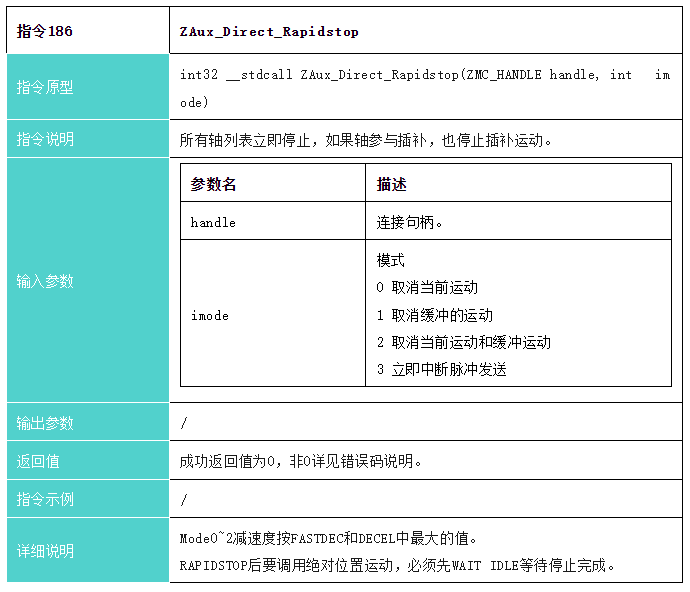
'ECAT總線初始化 GLOBAL CONST BUS_TYPE = 0 '總線類型。可用于上位機區分當前總線類型 GLOBAL CONST Bus_Slot = 0 '槽位號0(單總線控制器缺省0) GLOBAL CONST PUL_AxisStart = 0 '本地脈沖軸起始軸號 GLOBAL CONST PUL_AxisNum = 0 '本地脈沖軸軸數量 GLOBAL CONST Bus_AxisStart = 0 '總線軸起始軸號 GLOBAL CONST Bus_NodeNum = 1 '總線配置節點數量,用于判斷實際檢測到的從站數量是否一致 GLOBAL MAX_AXISNUM '最大軸數 MAX_AXISNUM = SYS_ZFEATURE(0) GLOBAL Bus_InitStatus '總線初始化完成狀態 Bus_InitStatus = -1 GLOBAL Bus_TotalAxisnum '檢查掃描的總軸數 DELAY(3000) '延時3S等待驅動器上電,不同驅動器自身上電時間不同,具體根據驅動器調整延時 ?"總線通訊周期:",SERVO_PERIOD,"us" Ecat_Init() '初始化ECAT總線 END GLOBAL SUB Ecat_Init() local Node_Num,Temp_Axis,Drive_Vender,Drive_Device,Drive_Alias RAPIDSTOP(2) for i = 0 to SYS_ZFEATURE(0) - 1 '初始化還原軸類型 AXIS_ENABLE(i) = 0 ATYPE(i) = 0 DELAY(20) next Bus_InitStatus = -1 Bus_TotalAxisnum = 0 SLOT_STOP(Bus_Slot) DELAY(200) SLOT_SCAN(Bus_Slot) '掃描總線 if return then ?"總線掃描成功","連接從站設備數:"NODE_COUNT(Bus_Slot) if NODE_COUNT(Bus_Slot) Bus_NodeNum then '判斷總線檢測數量是否為實際接線數量 ?"" ?"掃描節點數量與程序配置數量不一致!" ,"配置數量:"Bus_NodeNum,"檢測數量:"NODE_COUNT(Bus_Slot) Bus_InitStatus = 0 '初始化失敗。報警提示 endif '"開始映射軸號" for Node_Num = 0 to NODE_COUNT(Bus_Slot)-1 '遍歷掃描到的所有從站節點 Drive_Vender = NODE_INFO(Bus_Slot,Node_Num,0) '讀取驅動器廠商 Drive_Device = NODE_INFO(Bus_Slot,Node_Num,1) '讀取設備編號 Drive_Alias = NODE_INFO(Bus_Slot,Node_Num,3) '讀取設備撥碼ID if NODE_AXIS_COUNT(Bus_Slot,Node_Num) 0 then '判斷當前節點是否有電機 for j=0 to NODE_AXIS_COUNT(Bus_Slot,Node_Num)-1 '根據節點帶的電機數量循環配置軸參數(針對一拖多驅動器) Temp_Axis = Bus_AxisStart + Bus_TotalAxisnum '軸號按NODE順序分配 BASE(Temp_Axis) AXIS_ADDRESS = Bus_TotalAxisnum+1 '映射軸號 ATYPE = 65 '設置控制模式 65-位置 66-速度 67-轉矩 DRIVE_PROFILE = 18 Sub_SetDriverIo(Temp_Axis,Drive_Vender,48 + 48*Temp_Axis) '映射驅動器IO IO映射到控制器IO32-以后每個驅動器間隔32點 DISABLE_GROUP(Temp_Axis) '每軸單獨分組 Bus_TotalAxisnum = Bus_TotalAxisnum+1 '總軸數+1 next endif next ?"軸號映射完成","連接總軸數:"Bus_TotalAxisnum WA 200 SLOT_START(Bus_Slot) '啟動總線 if return then WDOG = 1 '使能總開關 for i = Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1 BASE(i) DELAY 50 AXIS_ENABLE = 1 next Bus_InitStatus = 1 ?"軸使能完成" ?"總線開啟成功" else ?"總線開啟失敗" Bus_InitStatus = 0 endif else ?"總線掃描失敗" Bus_InitStatus = 0 endif ENDSUB '總線驅動IO映射 'iAxis - 軸號 iVender - 驅動器類型 i_IoNum - 輸入輸出起始編號 GLOBAL SUB Sub_SetDriverIo(iAxis,iVender,i_IoNum) DRIVE_IO(Iaxis) = i_IoNum FWD_IN(Iaxis) = i_IoNum REV_IN(Iaxis) = i_IoNum + 1 DATUM_IN(Iaxis) = i_IoNum + 2 INVERT_IN(i_IoNum,ON) INVERT_IN(i_IoNum + 1,ON) INVERT_IN(i_IoNum + 2,ON) ENDSUB
利用按鈕的click事件,瀏覽選擇編輯好的bas文件下載掉電保存,并彈出反饋下載是否成功的提示。
private void BasFileDownLoad_Btn_Click(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { MessageBox.Show("未鏈接到控制器!", "提示"); } else { int tmpret = 0; string strFilePath; OpenFileDialog openFileDialog1 = new OpenFileDialog(); openFileDialog1.InitialDirectory = ""; openFileDialog1.Filter = "配置文件(*.bas)|*.bas"; openFileDialog1.RestoreDirectory = true; openFileDialog1.FilterIndex = 1; if (openFileDialog1.ShowDialog() == DialogResult.OK) { //打開配置文件 strFilePath = openFileDialog1.FileName; //下載到ROM tmpret = zmcaux.ZAux_BasDown(g_handle, strFilePath, 1); if (tmpret != 0) { MessageBox.Show("文件下載失敗!", "提示"); } else { MessageBox.Show("文件下載成功!", "提示"); } } } }
3、通過按鈕控件的click事件觸發初始化。
調用函數庫的ZAux_Execute函數(在線命令),通過在線命令調用basic腳本里面的總線初始化函數-- Ecat_Init()進行總線初始化。
private void EcatInitStart_Btn_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
}
else
{
int tmpret;
//-1可能正在執行初始化
if ((BasFlag == true) && (InitStatus != -1))
{
InitStatus = -1;
StringBuilder buffer = new StringBuilder(10240);
tmpret = zmcaux.ZAux_Execute(g_handle, "RUNTASK 1,Ecat_Init", buffer, 0); //任務1重新運行BAS中的初始化函數
if (tmpret != 0)
{
MessageBox.Show("總線初始化失敗!", "提示");
return;
}
else
{
MessageBox.Show("總線初始化成功!", "提示");
}
}
else
{
MessageBox.Show("Bas文件未加載");
return;
}
}
}
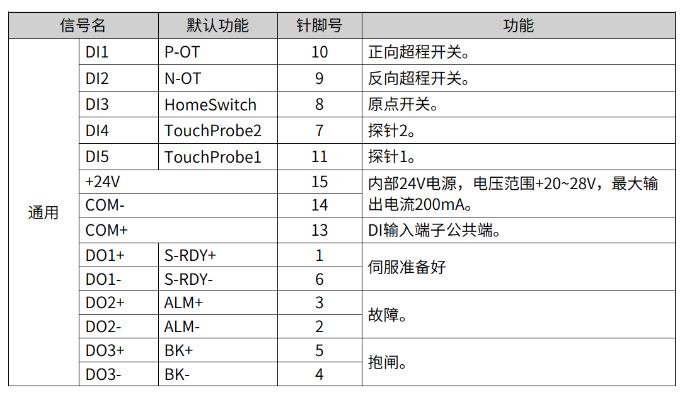
4、以匯川驅動器為例,驅動器IO映射的起始地址為DI1,也就是正向超程開關(正硬限位),若要設置負向超程開關,將起始地址加1。
可以通過按鈕控件的click事件,觸發設置軸的軟限位,以及原點、正負硬限位。驅動器IO映射的basic指令是DRIVE_IO。在這里調用在線命令的PC函數去實現驅動器IO映射。
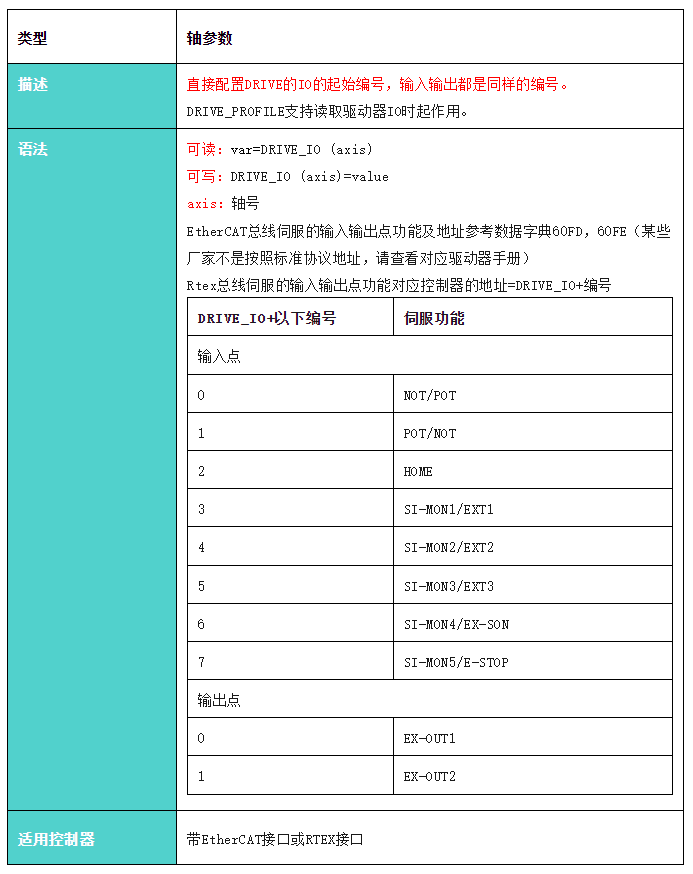
Basic指令說明見下圖:
DRIVE_IO -- 驅動器IO:
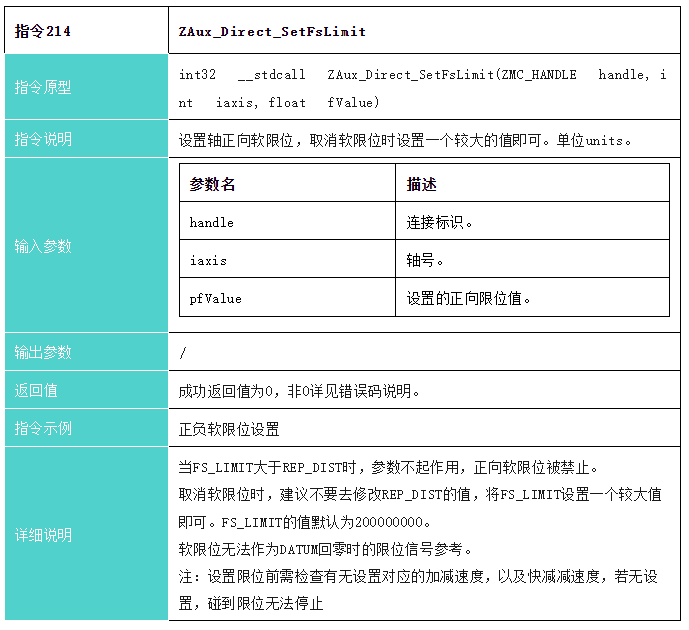
通過按鈕控件的click事件,配置軸的正負軟限位和驅動器IO起始地址(正負硬限位IO映射)。
private void Configure_OK_Button_Click(object sender, EventArgs e)
{
StringBuilder buffer = new StringBuilder(10240);
//正向軟限位設置
zmcaux.ZAux_Direct_SetFsLimit(g_handle, MoveAxis, Convert.ToSingle(FSLimit_Value.Text));
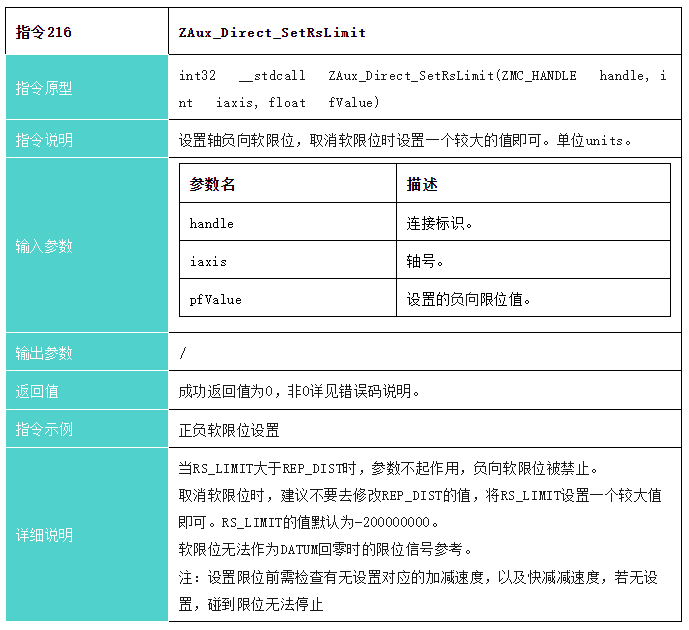
//負向軟限位設置
zmcaux.ZAux_Direct_SetRsLimit(g_handle, MoveAxis, Convert.ToSingle(RSLimit_Value.Text));
//驅動器IO起始地址
zmcaux.ZAux_Execute(g_handle, "DRIVE_IO(" + MoveAxis.ToString() + ") = " +DriveStart_IO_Value.Value.ToString(), buffer, 0);
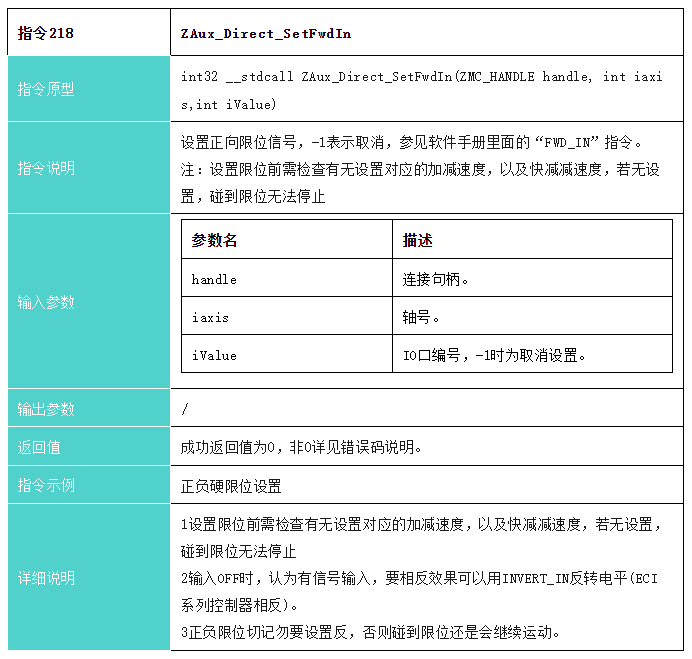
//正硬限位設置
zmcaux.ZAux_Direct_SetFwdIn(g_handle, MoveAxis, DRIVE_Start_IO);
zmcaux.ZAux_Direct_SetInvertIn(g_handle, DRIVE_Start_IO, 1);
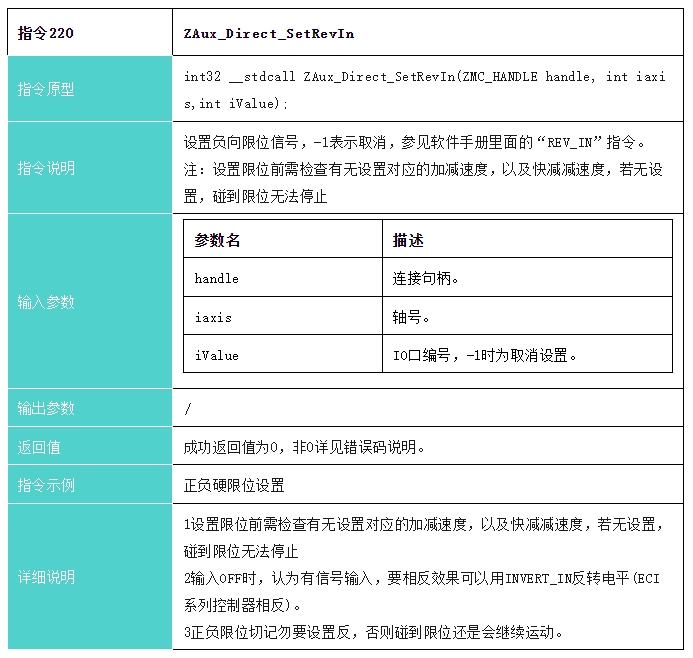
//負硬限位設置
zmcaux.ZAux_Direct_SetRevIn(g_handle, MoveAxis, DRIVE_Start_IO + 1);
zmcaux.ZAux_Direct_SetInvertIn(g_handle, DRIVE_Start_IO + 1, 1);
MessageBox.Show("當前軸配置成功!", "提示");
}
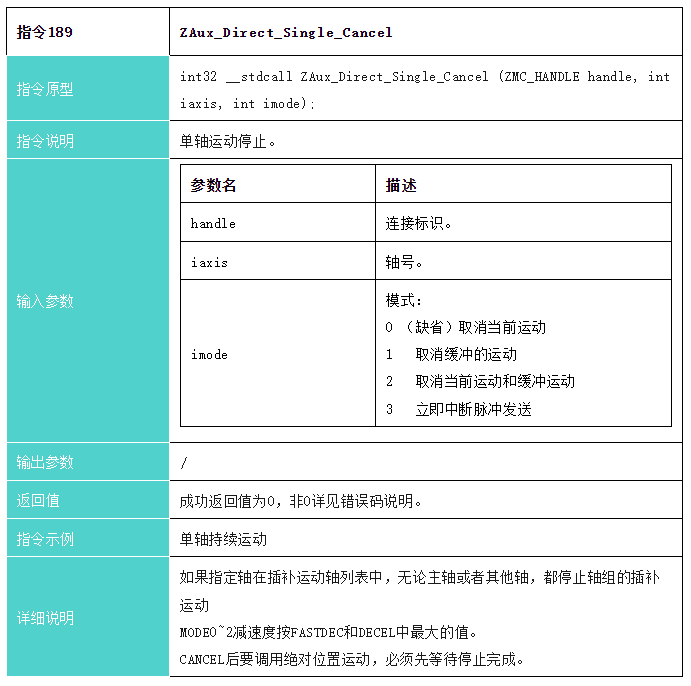
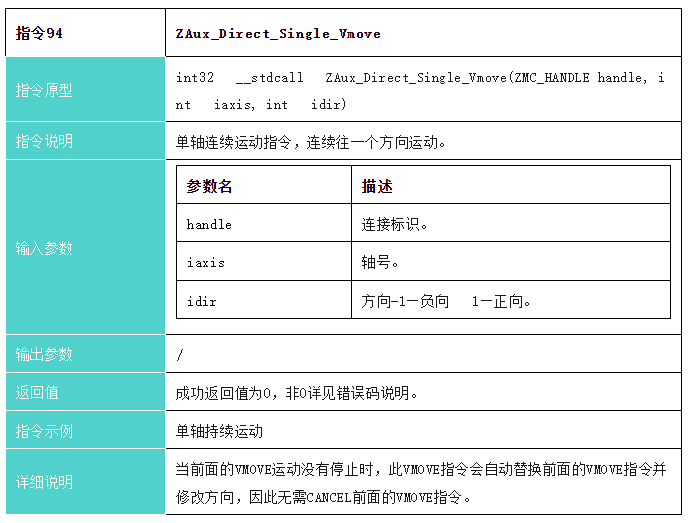
5、通過按鈕控件的MouseDown(鼠標在組件上方并按下時發生)事件來觸發單軸持續運動;MouseUp(鼠標在組件上方并松開時發生)事件來觸發單軸運動的停止。模擬手動運動的調試過程。
//正向
private void Fwd_Button_MouseDown(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Vmove(g_handle, MoveAxis, 1);
}
private void Fwd_Button_MouseUp(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Cancel(g_handle, MoveAxis, 2);
}
//負向
private void Rev_Button_MouseDown(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Vmove(g_handle, MoveAxis, -1);
}
private void Rev_Button_MouseUp(object sender, MouseEventArgs e)
{
zmcaux.ZAux_Direct_Single_Cancel(g_handle, MoveAxis, 2);
}
6、通過textbook控件的TextChanged(空間上text屬性更改時發生)事件來修改運動過程中軸的基本參數,定時器會獲取接收。
//脈沖當量變化
private void Units_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetUnits(g_handle, MoveAxis, Convert.ToSingle(Units_Value.Text));
}
//軸速度變化
private void Speed_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetSpeed(g_handle, MoveAxis, Convert.ToSingle(Speed_Value.Text));
}
//加速度變化
private void Accel_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetAccel(g_handle, MoveAxis, Convert.ToSingle(Accel_Value.Text));
}
//減速度變化
private void Decel_Value_TextChanged(object sender, EventArgs e)
{
zmcaux.ZAux_Direct_SetDecel(g_handle, MoveAxis, Convert.ToSingle(Decel_Value.Text));
}
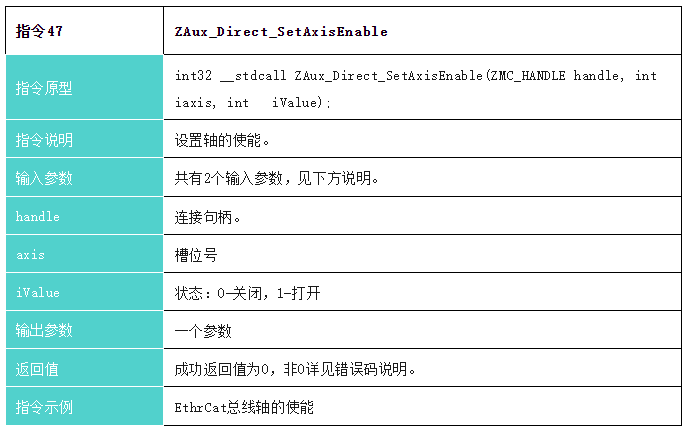
7、通過按鈕控件,與文本信息比對,觸發總線軸的使能切換功能。
private void Enable_Button_Click(object sender, EventArgs e)
{
if (g_handle == (IntPtr)0)
{
MessageBox.Show("未鏈接到控制器!", "提示");
return;
}
int ret = 0;
if (Enable_Value.Text == "ON")
{
ret = zmcaux.ZAux_Direct_SetAxisEnable(g_handle, MoveAxis, 0);
}
else
{
ret = zmcaux.ZAux_Direct_SetAxisEnable(g_handle, MoveAxis, 1);
}
}
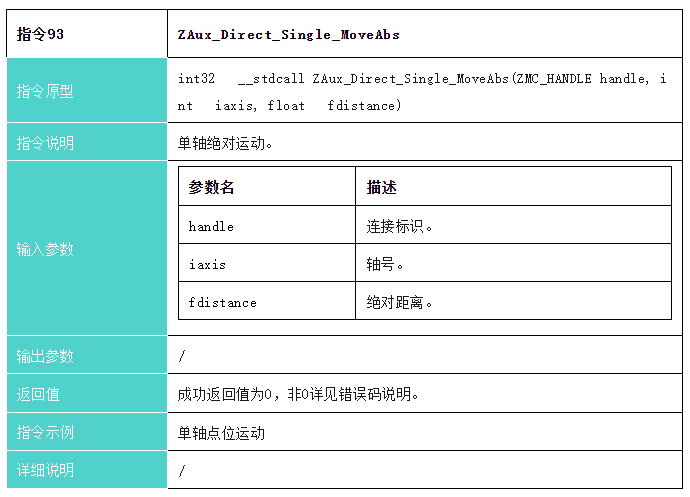
8、通過復選框的切換、單選框的選擇實現寸動運動調試的功能。
//寸動方向選擇 private void MoveDirection_CheckedChanged(object sender, EventArgs e) { if (MoveDirection.Checked == false) { MoveDirection.Text = "運動方向: 正"; dir = 1; } else { MoveDirection.Text = "運動方向: 負"; dir = -1; } } //寸動啟動 private void InchStart_Button_Click(object sender, EventArgs e) { if (g_handle == (IntPtr)0) { MessageBox.Show("未鏈接到控制器!", "提示"); } else { //絕對運動 if (MoveAbs_RadBtn.Checked == true) { zmcaux.ZAux_Direct_Single_MoveAbs(g_handle, MoveAxis, dir * Convert.ToSingle(InchDistance_Value.Text)); } //相對運動 if (MoveOpp_RadBtn.Checked == true) { zmcaux.ZAux_Direct_Single_Move(g_handle, MoveAxis, dir * Convert.ToSingle(InchDistance_Value.Text)); } } }
9、通過定時器的刷新,對軸參數的接收,初始化信息,IO監控等信息進行實時的反饋。
//軸參數更新
private void Update_AxisPara()
{
int CurAxisAtype = 0;
int CurAxisIdle = 0;
int CurAxisStatus = 0;
double CurAxisFSLimit = 0;
double CurAxisRSLimit = 0;
double CurAxisDpos = 0;
double CurAxisMpos = 0;
Axis_Para[0] = Convert.ToSingle(Units_Value.Text);
Axis_Para[1] = Convert.ToSingle(Speed_Value.Text);
Axis_Para[2] = Convert.ToSingle(Accel_Value.Text);
Axis_Para[3] = Convert.ToSingle(Decel_Value.Text);
MoveAxis = Convert.ToInt32(AxisNum_Value.Text);
zmcaux.ZAux_Direct_GetAtype(g_handle, MoveAxis, ref CurAxisAtype);
zmcaux.ZAux_Direct_GetDpos(g_handle, MoveAxis, ref CurAxisDpos);
zmcaux.ZAux_Direct_GetMpos(g_handle, MoveAxis, ref CurAxisMpos);
zmcaux.ZAux_Direct_GetIfIdle(g_handle, MoveAxis, ref CurAxisIdle);
zmcaux.ZAux_Direct_GetAxisStatus(g_handle, MoveAxis, ref CurAxisStatus);
zmcaux.ZAux_Direct_GetUnits(g_handle, MoveAxis, ref Axis_Para[0]);
zmcaux.ZAux_Direct_GetSpeed(g_handle, MoveAxis, ref Axis_Para[1]);
zmcaux.ZAux_Direct_GetAccel(g_handle, MoveAxis, ref Axis_Para[2]);
zmcaux.ZAux_Direct_GetDecel(g_handle, MoveAxis, ref Axis_Para[3]);
zmcaux.ZAux_Direct_GetFsLimit(g_handle, MoveAxis, ref CurAxisFSLimit);
zmcaux.ZAux_Direct_GetRsLimit(g_handle, MoveAxis, ref CurAxisRSLimit);
if (EcatInitFlag == true) //總線初始化完成后實時顯示狀態信息
{
AxisAtype_Label.Text = "軸 類 型: " + CurAxisAtype;
AxisDpos_Label.Text = "DPOS位置: " + CurAxisDpos;
AxisMpos_Label.Text = "MPOS位置: " + CurAxisMpos;
AxisIdle_Label.Text = "運動狀態: " + CurAxisIdle;
AxisStatus_Label.Text = "軸 狀 態: " + CurAxisStatus;
}
}
10、通過按鈕控件的的click事件觸發斷開鏈接。
private void Local_DisConnect_Button_Click(object sender, EventArgs e)
{
timer1.Enabled = false;
zmcaux.ZAux_Close(g_handle);
g_handle = (IntPtr)0;
Local_DisConnect_Button.BackColor = Color.White;
this.Text = "未連接";
}
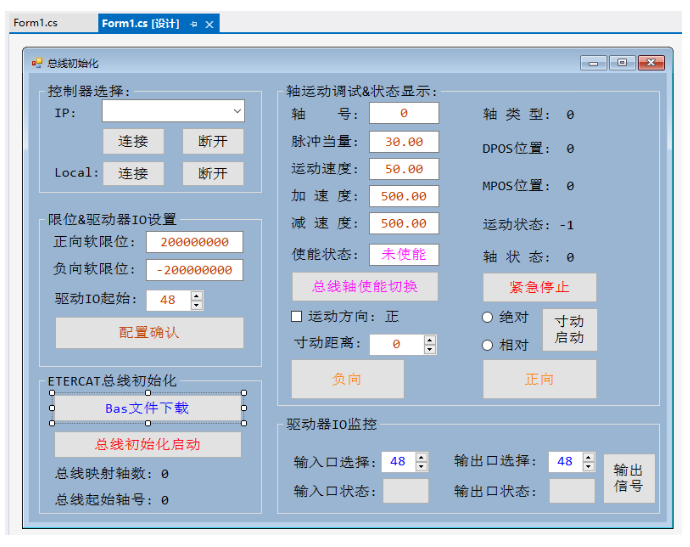
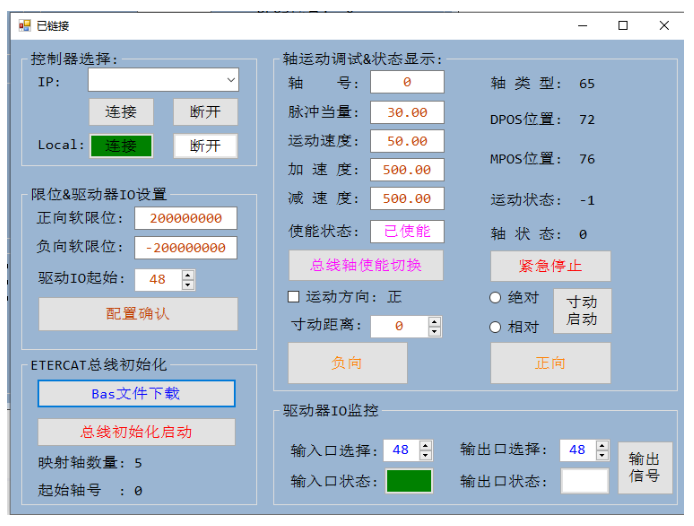
四、運行效果
運行主界面如下:
視頻講解:
http://www.zmotion.com.cn/support_info_284.html
附錄:basic初始化程序通用模板
global CONST BUS_TYPE = 0 '總線類型。用于上位機區分當前模式
global CONST MAX_AXISNUM = 32 '最大軸數
global CONST Bus_Slot = 0 '槽位號0
global CONST Bus_AxisStart = 0 '總線軸起始軸號
global Bus_InitStatus '總線初始化完成狀態
Bus_InitStatus = -1
global Bus_TotalAxisnum '檢查掃描的總軸數
delay(3000) '延時3S等待驅動器上電
'**********************初始化ECAT總線**********************
Ecat_Init()
global sub Ecat_Init()
for i=0 to MAX_AXISNUM - 1 '初始化還原軸類型
AXIS_ENABLE(i) = 0
atype(i)=0
next
Bus_InitStatus = -1
Bus_TotalAxisnum = 0
SLOT_STOP(Bus_Slot)
delay(200)
slot_scan(Bus_Slot) '開始掃描
if return then
?"總線掃描成功","連接設備數:"NODE_COUNT(Bus_Slot)
?"開始映射軸號"
endif
for i=0 to NODE_COUNT(Bus_Slot)-1 '遍歷總線下所有從站節點
if NODE_AXIS_COUNT(Bus_Slot,i) 0 then '判斷當前節點是否有電機
for j=0 to NODE_AXIS_COUNT(Bus_Slot,i)-1
AXIS_ADDRESS(Bus_AxisStart+i)=Bus_TotalAxisnum+1 '映射軸號
ATYPE(Bus_AxisStart+i)=65 '設置控制模式
DRIVE_PROFILE(Bus_AxisStart+i)= 4 '設置PROFILE功能
disable_group(Bus_AxisStart+i) '每軸單獨分組
DRIVE_IO(Bus_AxisStart+i) = 128 + (Bus_AxisStart+i)*16
REV_IN(Bus_AxisStart+i) = 128 + (Bus_AxisStart+i)*16
FWD_IN(Bus_AxisStart+i) = 129 + (Bus_AxisStart+i)*16
DATUM_IN(Bus_AxisStart+i) = 130 + (Bus_AxisStart+i)*16
INVERT_IN(128 + (Bus_AxisStart+i)*16,ON)
INVERT_IN(129 + (Bus_AxisStart+i)*16,ON)
INVERT_IN(130 + (Bus_AxisStart+i)*16,ON)
Bus_TotalAxisnum=Bus_TotalAxisnum+1 '總軸數+1
next
endif
next
?"軸號映射完成","連接總軸數:"Bus_TotalAxisnum
wa 2000
SLOT_START(Bus_Slot) '啟動總線
if return then
?"總線開啟成功"
?"開始清除驅動器錯誤(根據驅動器數據字典設置)"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
DRIVE_CONTROLWORD(i)=128 '根據驅動器數據字典
wa 100
DRIVE_CONTROLWORD(i)=6
wa 100
DRIVE_CONTROLWORD(i)=15
wa 100
next
?"驅動器錯誤清除完成"
wa 100
?"清除控制器錯誤"
datum(0)
DRIVE_CLEAR(0)
?"控制器錯誤清除完成"
wa 100
?"軸使能準備"
for i= Bus_AxisStart to Bus_AxisStart + Bus_TotalAxisnum - 1
base(i)
AXIS_ENABLE=1
next
wdog=1 '使能總開關
Bus_InitStatus = 1
?"軸使能完成"
else
?"總線開啟失敗"
Bus_InitStatus = 0
endif
?"總線掃描失敗"
Bus_InitStatus = 0
end sub
本次,正運動技術EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(二):EtherCAT總線初始化,就分享到這里。
更多精彩內容請關注“正運動小助手”公眾號,需要相關開發環境與例程代碼,請咨詢正運動技術銷售工程師:400-089-8936。
本文由正運動技術原創,歡迎大家轉載,共同學習,一起提高中國智能制造水平。文章版權歸正運動技術所有,如有轉載請注明文章來源。
正運動技術專注于運動控制技術研究和通用運動控制軟硬件產品的研發,是國家級高新技術企業。正運動技術匯集了來自華為、中興等公司的優秀人才,在堅持自主創新的同時,積極聯合各大高校協同運動控制基礎技術的研究,是國內工控領域發展最快的企業之一,也是國內少有、完整掌握運動控制核心技術和實時工控軟件平臺技術的企業。主要業務有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯 黃宇
-
總線
+關注
關注
10文章
2878瀏覽量
88052 -
上位機
+關注
關注
27文章
941瀏覽量
54790 -
運動控制卡
+關注
關注
7文章
111瀏覽量
15452 -
ethercat
+關注
關注
18文章
686瀏覽量
38674
發布評論請先 登錄
相關推薦
EtherCAT運動控制卡XPCIE1032H上位機開發(一):驅動安裝

單軸PSO視覺飛拍與精準輸出:EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(七)

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(九)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十三)
EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(十四)




不止10倍提速!PCIe EtherCAT實時運動控制卡XPCIE1032H 等您評測!

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發(一):驅動安裝與建立連接
EtherCAT超高速實時運動控制卡(二):EtherCAT總線初始化

EtherCAT超高速實時運動控制卡XPCIE1032H上位機C#開發





 工商網監
工商網監
評論