 一種用于自主導航的具有擴展傳感器視場的自旋轉單驅動無人機
一種用于自主導航的具有擴展傳感器視場的自旋轉單驅動無人機
0. 筆者總結
無人駕駛飛行器(UAV)在各種現實應用中發揮著越來越重要的作用,例如搜索和救援、洞穴勘測、建筑測繪和考古勘探。為了滿足這些應用中的任務要求,自定位、環境測繪和避障的能力是關鍵。這些能力通常基于無人機上的視覺傳感器提供的環境觀察,包括被動式(例如 RGB 相機和熱感相機)或主動式(例如光探測和測距 (LiDAR) 和紅外深度相機)。無人機現有的一個問題是這些傳感器的小視場(FoV)嚴重限制了其感知能力和任務效率。這里也推薦工坊推出的新課程《零基礎入門四旋翼建模與控制(MATLAB仿真)[理論+實戰]》。
今天筆者介紹的是一項來自香港大學火星實驗室新的工作,與傳統的自主探索無人機結構不同,這項工作使用自旋裝置擴展了無人機的感知FOV,能夠在自旋狀態下進行自主導航,并且可以通過激光雷達檢測靜態和動態障礙物,大大提高了無人機的感知避障能力。
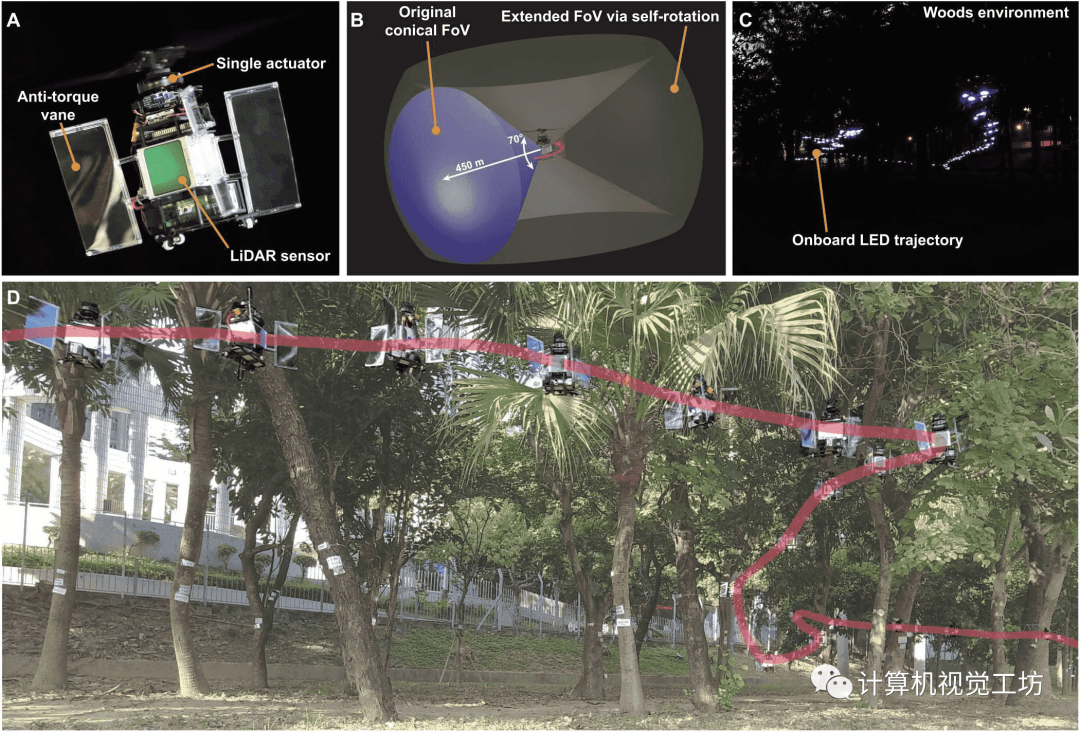
圖1,(A) PULSAR 使用一個執行器(即電機)進行全 3D 位置控制,并使用一個板載 LiDAR 傳感器進行自主導航。(B) 未補償的電機反扭矩自然會導致自旋轉,將傳感器水平 FoV 延伸至 360°。(C) PULSAR在夜間未知森林環境中的自主飛行;飛行軌跡由機載藍色發光二極管(LED)指示。(D) 白天在樹林中自主飛行;飛行軌跡如紅色路徑所示。
1. 導讀
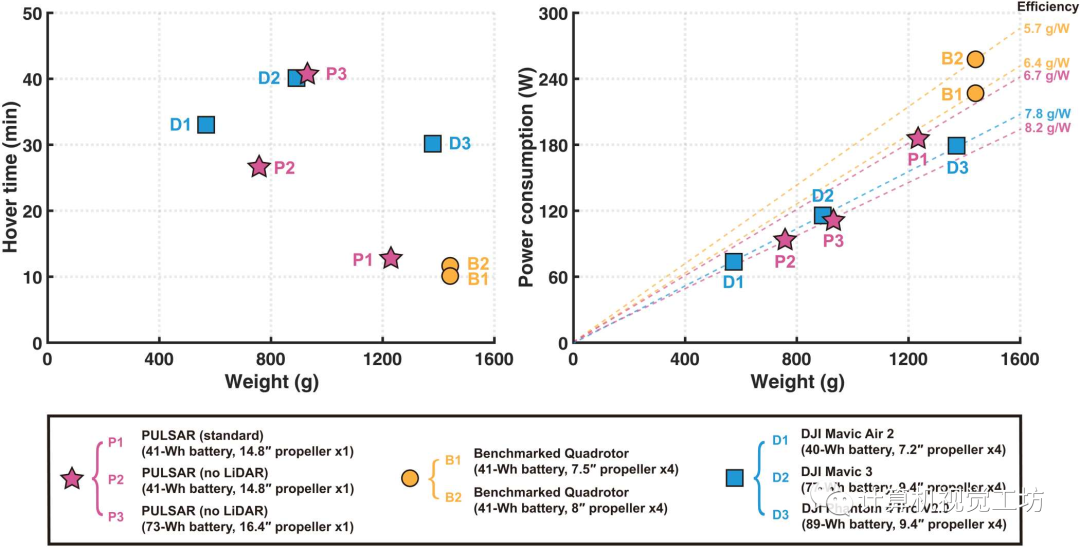
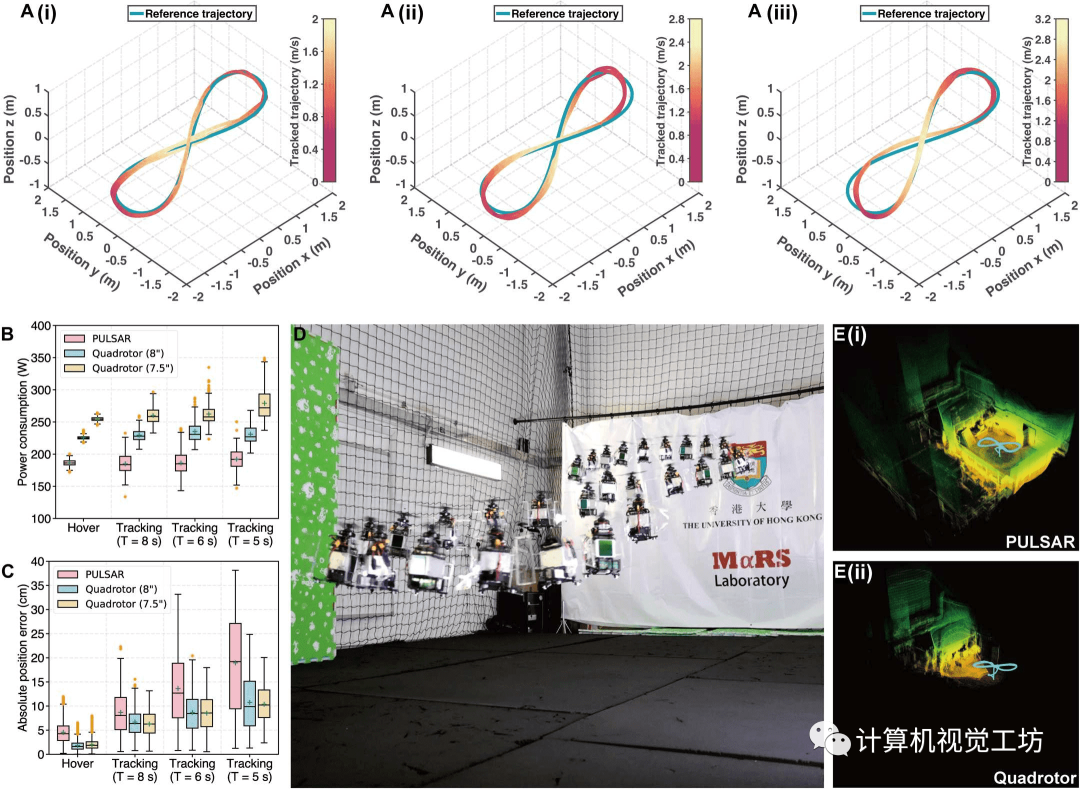
無人機在很大程度上依賴視覺傳感器來感知障礙物和探索環境。由于傳感器視場較小,目前的無人機在感知能力和任務效率方面都受到限制。一種解決方案是利用無人機的自轉來擴展傳感器FoV,而不消耗額外的功率。由于高度耦合和非線性動力學給設計和控制帶來的困難,以及高速自轉給導航帶來的挑戰,這種由無人機電機的反轉矩引起的自然機制很少被現有的自主無人機利用。我們提出了一種動力飛行的超欠驅動激光雷達(光探測和測距)傳感空中機器人(PULSAR),這是一種敏捷且自旋轉的無人機,其三維位置僅通過驅動一個電機來完全控制,以獲得所需的推力和力矩。單個致動器的使用有效地減少了動力飛行中的能量損失。因此,PULSAR比具有相同總螺旋槳盤面積和航空電子有效載荷的基準四旋翼機功耗低26.7%,同時保持了良好的靈活性。PULSAR通過機載激光雷達傳感器的增強,可以在未知環境中執行自主導航,并在全景中檢測靜態和動態障礙物,而無需任何外部儀器。我們提供了PULSAR在環境探索和多向動態避障中的實驗報告,該實驗通過自旋轉擴展FoV,可以提高感知能力、任務效率和飛行安全性。
2. 主要貢獻
我們提出了一種具有擴展傳感器視場的自主、單驅動、自旋轉無人機。無人機使用單個執行器(電機)來控制其完整 3D 位置。我們的無人機中的葉片槳距角在每次螺旋槳旋轉(而不是機身旋轉)時通過改變電機速度來調整一次,從而實現高控制率,從而提高了無人機的整體敏捷性 和控制精度。同時,電機反扭矩自然地驅動無人機機身旋轉,利用固有運動來擴展傳感器視場,而無需添加額外的動力執行器,有效地減少了執行器引起的能量損失和組件重量,這些都有助于降低整體功耗。
此外,通過利用主動和高速率 LiDAR 測量,所提出的自旋轉無人機能夠在白天和夜間在未知、無GNSS 的環境中完全自主導航。我們在室內和室外環境中展示了 PULSAR 在功率效率、敏捷性和自導航能力方面的有效性。在所有實驗中,無人機完全依靠其機載傳感器和計算機來估計其狀態并感知環境,而無需使用任何外部儀器。實驗表明,與具有相同螺旋槳盤總面積和航空電子有效載荷的基準四旋翼飛行器相比,PULSAR 的功耗減少了 26.7%,同時在軌跡跟蹤誤差方面保持了相當的敏捷性。PULSAR 對外部命令做出響應,并對陣風等外部干擾表現出高度魯棒性,使其適合現實世界的操作。PULSAR 借助實時運行整個導航框架的小型機載計算機,成功地在雜亂、無法使用 GNSS 的環境中演示了自主飛行。得益于其擴展的 FoV,PULSAR 能夠檢測并避開原始傳感器 FoV 之外各個方向的動態障礙物。
3. 框架解析
機械結構及電子裝置
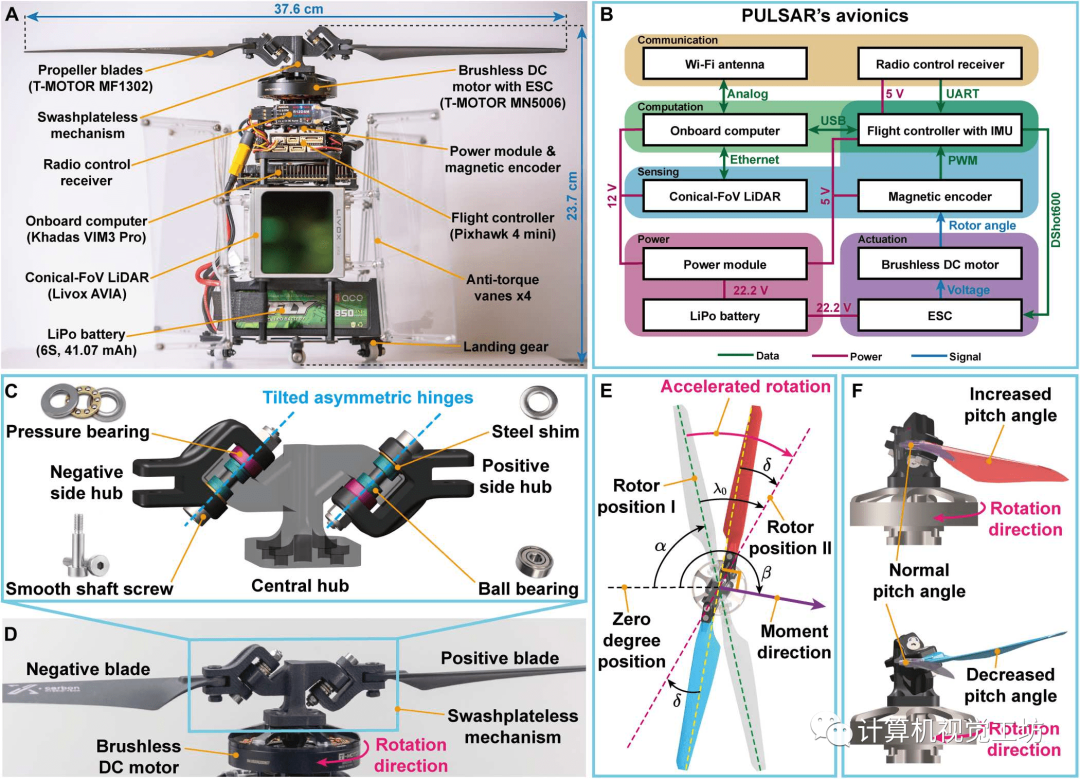
圖2,(A) 組件描述。(B) 所有電子元件之間的互連。(C)無斜盤裝置的詳細機械結構。(D) 無斜盤裝置、螺旋槳葉片和電機的組裝。(E) 轉子加速導致葉片滯后于轉子的過程。當在轉子位置I(即角度)施加加速電壓時,轉子加速并到達轉子位置II(即角度 )。由于葉片與轉子之間的鉸鏈提供了額外的旋轉自由度,葉片慣性將使其沿著鉸鏈旋轉,并在轉子后面產生葉片滯后角(即)。加速后葉片的實際位置為位置角,如黃色虛線所示。(F) 由于傾斜的不對稱鉸鏈設計,轉子的滯后將導致紅色葉片增加其槳距角,而藍色葉片從紫色葉片指示的標稱槳距角減小其槳距角。不同的槳距角變化導致螺旋槳盤平面內產生凈力矩 ,其方向垂直于實際葉片位置[即角度 ,如 (E) 中的紫色箭頭所示] 。
軟件框架
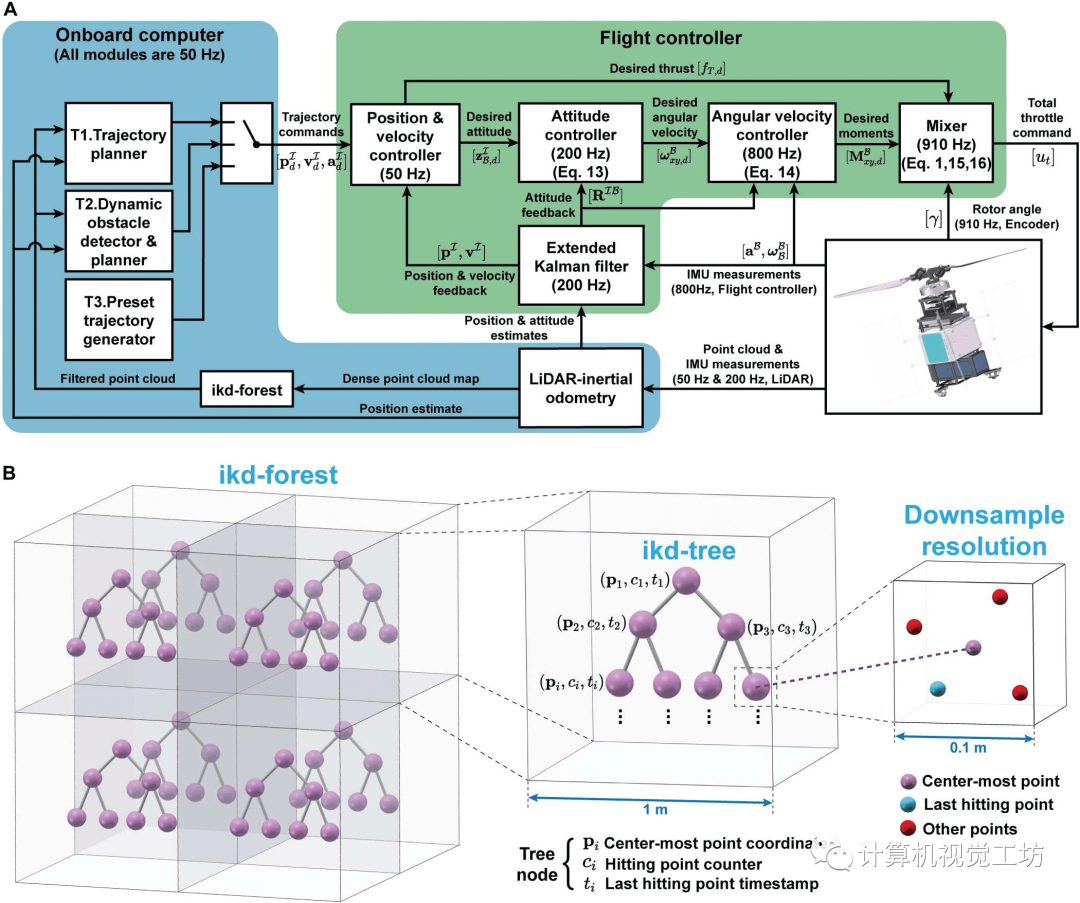
圖3,(A) 總體軟件框架。根據應用,軌跡命令在不同源之間切換。(B) 軌跡規劃器使用的地圖來表示環境中的靜態和動態障礙物。該地圖被命名為“ikd-forest”,它將空間切割成 分辨率為1 m 的體素集合,每個體素包含一個增量 k-d 樹數據結構ikd-tree 。ikd-tree通過保留樹上的最中心點,以 0.1 米的空間分辨率對體素中包含的所有點進行下采樣。除了點坐標 之外,k維樹的每個節點還保存擊中點計數器總數和最后擊中點時間戳 。
如圖3A所示,軟件框架分為兩部分,分別在各自的硬件上運行。第一部分是飛行控制,包括控制器、估計器和混合器,它在飛行控制器板上以多個頻率運行:50 Hz用于位置控制,200 Hz用于姿態控制,800 Hz用于角速度控制,910 Hz用于混合器。該部分只有一個輸出:總油門指令,表示PULSAR的單致動特性。第二部分是導航模塊,它由里程計和軌跡規劃組成,并在機載ARM計算機上以50 Hz的頻率運行。
從機載計算機到飛行控制器的數據流是激光雷達慣性里程計估計的無人機狀態和通過三種方式生成的軌跡命令:預設軌跡庫包含離線規劃的軌跡,軌跡規劃器根據對環境的實際感知實時規劃平滑無障礙的軌跡,并且動態障礙物檢測器和規劃器檢測動態障礙物并生成規避軌跡。不同的實驗會根據任務要求選擇軌跡命令。
軟件模塊的通信框架是運行在Ubuntu 20.04上的ROS Noetic。所有的軟件模塊都是用C++實現的。PULSAR的飛行控制固件是在PX4 V1.11.2的基礎上開發的。機載計算機和飛行控制器之間的通信基于MAVROS。
LIO
PULSAR的全狀態估計是通過FAST-LIO2實現的,這是一種高效、穩健的激光雷達慣性里程計框架。FAST-LIO2估計無人機狀態(即位置、速度和姿態,包括自轉),并更新慣性(地面固定)幀中的局部地圖(見“動態建模”部分的描述),其航向被選擇為初始無人機航向。我們將激光雷達掃描速率設置為50 Hz,這意味著50 Hz的狀態估計和地圖更新。這樣的高頻地圖更新使FAST-LIO2能夠緊密跟蹤甚至非常激進的運動,例如PULSAR的自轉。估計的狀態包括無人機的位置、速度和姿態,這些信息被提供給在飛行控制器上實現的擴展卡爾曼濾波器(EKF)。EKF將進一步將狀態與機載慣性測量單元(IMU)融合,以更高頻率完善無人機狀態,以便使用在同一飛行控制器上實現的控制器。請注意,PULSAR的EKF的狀態估計取決于IMU和附加傳感器(即激光雷達或外部運動捕捉系統)。如果沒有額外的傳感器,估計就不能正常工作。EKF的細節在補充材料中進行了描述。
ikd-forest
除了里程計,自主飛行和動態避障的另一個基本要求是建一張地圖,同時表示飛行環境中的靜態和動態障礙物。我們開發了一個地圖,稱為增量k維森林(ikdforest,見圖3B),它是增量k維樹(ikd樹)的集合,每個樹都包含在一個體素中(立方邊長為1m)。ikd-tree首先通過根據規定的分辨率(0.1m)僅保留最中心點來對相應體素中的點進行下采樣。然后,將保留的點組織成k維樹結構,用于有效的最近鄰居搜索。ikd-tree可以增量更新(插入和刪除)和動態再平衡,ikd-forest繼承了這些優點。此外,與將所有點構建為大樹的ikd-tree相比,ikd-forest實現了更高的效率,因為每個體素中的每個ikd-tree的尺寸顯著減小。
在ikd-tree的每個節點上,都會保存點坐標。為了區分動態對象和靜態對象上的點,節點上還保存了兩個額外的時間特征:命中點計數器和最后一個命中點時間戳。命中點計數器記錄與節點上的點(即最中心點)過于接近(即在0.1 m分辨率內)的點的數量,盡管這些非最中心點已通過下采樣去除。最后命中點時間戳表示最后一個點命中節點的時間戳。
軌跡生成與自主飛行
為了在有障礙物的環境中生成安全的軌跡,我們在機載計算機上部署了路徑規劃模塊,通過接收機載激光雷達測量的點云以50 Hz運行。路徑規劃模塊是基于時間累積局部地圖和動態A* 搜索算法實現的。
為了在路徑規劃中實現更快的最近鄰避障搜索,ikd-forest用于維護時間累積的局部地圖,該局部地圖僅考慮最近掃描中出現的點(由最后命中點時間戳指示)。此外,使用了“后退規劃地平線”策略,其中規劃者的起始位置取自當前時間之后20 ms的當前軌跡。“后退規劃范圍”策略消除了規劃者對里程計的依賴,因此他們可以并行運行。然后將規劃好的軌跡傳輸給飛行控制器進行跟蹤。一旦在當前軌跡上檢測到碰撞,或者無人機遠離跟蹤的軌跡,就會觸發重新規劃模塊,重新規劃新的軌跡,以確保復雜環境下的飛行安全。當無人機的當前位置在目標航路點的1米范圍內時,該航路點被視為到達,下一個航路點將被用作觸發上述規劃過程的新目標點。
動態避障
我們設計了一個探測器來探測接近無人機的動態障礙物。因為動態障礙物僅在短時間內出現,并且在連續掃描中出現在不同位置,所以在最近掃描中收集的(由最后擊中點時間戳指示)并且具有小擊中點計數器的點被認為是動態障礙物,而其余的點被認為是靜態障礙物。在實驗中,時間戳和計數器的閾值被很好地調整以實現可靠的檢測性能。一旦檢測到動態障礙物,就產生一個目標點,使得它到UAV的距離比地圖中最近的靜態點短,并且它位于與物體的進入方向正交的方向上。第一個條件保證無人機與目標點之間的空間沒有任何靜態障礙物,第二個條件便于無人機躲避動態障礙物。最后,生成的目標點被發送到飛行控制器進行機載控制。這里也推薦工坊推出的新課程《零基礎入門四旋翼建模與控制(MATLAB仿真)[理論+實戰]》。
4. 實驗
我們進行了各種實際實驗來驗證 PULSAR 的性能。在所有實驗中,PULSAR 使用相同的 LiDAR 慣性里程計和軌跡跟蹤控制器來分別估計其完整狀態并跟蹤軌跡命令(圖 3A)。根據實驗目的,軌跡命令由機載軌跡規劃器、動態障礙物檢測器和規劃器或預設軌跡庫生成。
飛行效率
室內軌跡跟蹤
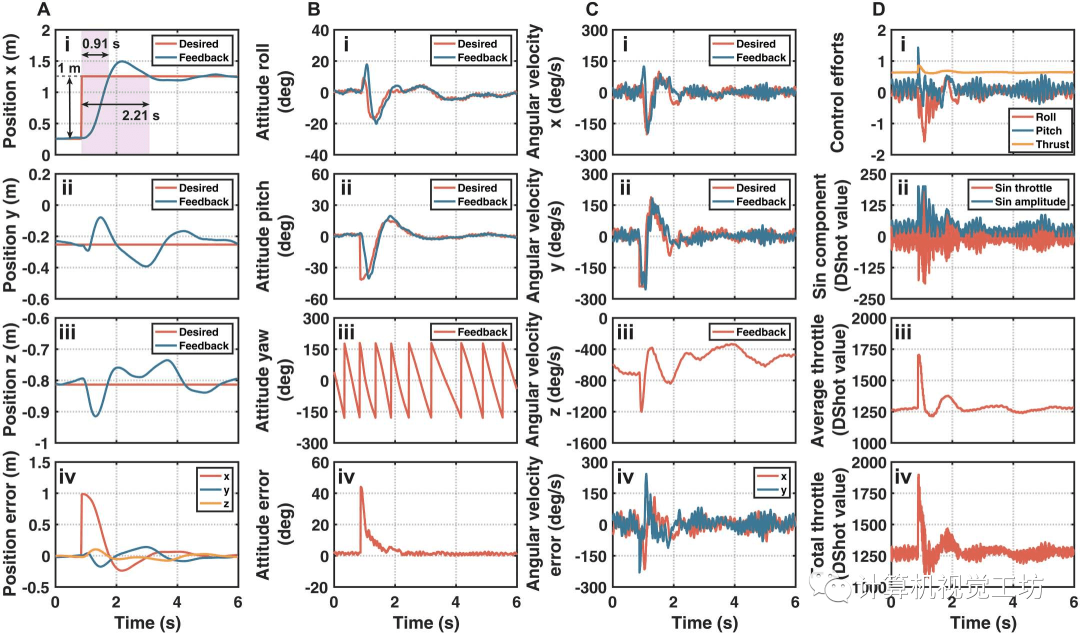
位置指令響應
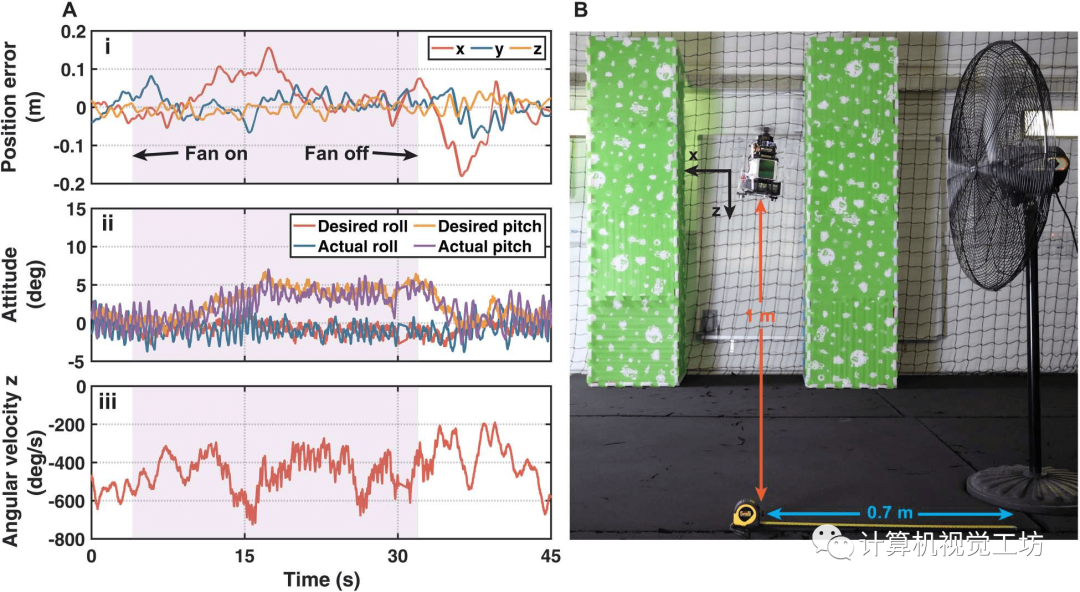
抗干擾魯棒性
在無GNSS的未知環境自主導航

(A) PULSAR 在室外木材環境中的自主航路點導航。起點和終點相同。每個航點上顯示的時間是 PULSAR 到達該航點的時間。在飛行過程中,同時構建環境的 3D 點云地圖。(B 和 C) 使用 PULSAR 進行動態避球。球從兩個正交方向拋出,其躲避過程分別如圖(B)和(C)所示。在這兩種情況下,左側疊加的快照顯示了球的軌跡、PULSAR 檢測到球時的位置以及 PULSAR 執行的回避軌跡。右側圖像顯示環境地圖的第三人稱視圖、當前激光雷達點測量、檢測到的球位置及其軌跡,以及避球前后的完整無人機軌跡。左側捕捉快照的相機的姿勢由綠色箭頭指示。環境地圖由運行在車載計算機上的激光雷達慣性測距系統同時構建。(D) 自主航路點導航實驗中里程計和軌跡規劃器的計算時間。(E)動態避障實驗中里程計、動態障礙物檢測器和規劃器的計算時間。
動態避障

5. 總結
PULSAR的高能效、自主導航能力和擴展的傳感器FoV使其非常適合環境調查、搜救、救災、地形測繪和自動三維重建等勘探任務。這些任務中的環境通常是未知的,GNSS失效(例如,樹冠、洞穴、隧道和災后建筑),并且涉及靜態結構和動態物體(例如,鳥類和動物)。正如實驗所證明的那樣,PULSAR可以在這些真實世界的環境中安全運行,并在白天和晚上快速獲取環境數據,為決策提供及時可靠的反饋。
審核編輯:劉清
-
傳感器
+關注
關注
2552文章
51217瀏覽量
754611 -
RGB
+關注
關注
4文章
799瀏覽量
58569 -
無人機
+關注
關注
230文章
10461瀏覽量
181002 -
無人駕駛飛行器
+關注
關注
0文章
4瀏覽量
3198 -
FOV
+關注
關注
0文章
36瀏覽量
5902
原文標題:SCI ROBOT 2023 港大開源 | 一種用于自主導航的具有擴展傳感器視場的自旋轉單驅動無人機
文章出處:【微信號:3D視覺工坊,微信公眾號:3D視覺工坊】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
MOS 管在無人機電池中的關鍵應用

嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
霍爾傳感器在無人機中的應用






 工商網監
工商網監
評論