 一種適用于13. 56 MHz RFID讀寫器的天線阻抗自動匹配方法
一種適用于13. 56 MHz RFID讀寫器的天線阻抗自動匹配方法
射頻設別( Radio Frequency Identification,RFID)技術是從20世紀90年代興起并逐步走向成熟的一項自動識別技術,通過射頻耦合方式進行非接觸雙向通信,達到目標識別和數據交換的目的。
RFID讀寫器在移動過程中,天線感應系數和阻抗的易變性造成讀寫器傳輸功率不必要的損耗和識別能力的下降。對于讀寫器天線阻抗的匹配,國外一些大公司的研究已經轉向自動匹配方面,并有了比較成功的案例,而國內應用研究主要還集中于手動匹配方面。隨著集成技術的發展,天線與讀寫器模塊將向集成化發展,對于天線阻抗的匹配也將提出新的要求,而手動匹配是個耗時長且復雜的過程。
因此,天線阻抗的自動匹配技術也將成為一種發展趨勢。納米軟件提出了天線阻抗的手動匹配方法,并在最大化應用集成元件的情況下,提出了一種新的適用于13. 56 MHz RFID讀寫器的天線阻抗自動匹配方法。
1 阻抗手動匹配技術
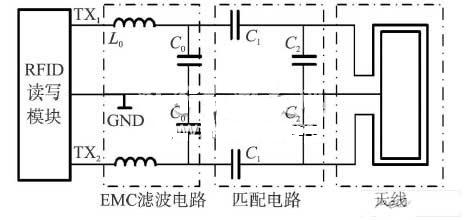
RFID系統使用外接天線與電子標簽進行無線通信。天線夾具形狀和尺寸的易變性使天線的輸入阻抗易隨外部環境的變化還發生微弱變化,導致傳輸功率的無用損耗。國際上RFID讀寫器天線標準阻抗一般都為50Ω,Namisoft設定阻抗匹配目標為(50 + j0)Ω。天線電路如圖1所示,一般包含3個部分:
(1)電磁兼容( EMC)濾波(L0 , C0 )電路;(2)包含可調諧電容C1、C2 的匹配電路;(3)天線。
EMC濾波電路濾去了載波頻率為13. 56 MHz阻抗變換時的諧波干擾。它有一個固定的諧振頻率,這個頻率是實際數據傳輸率和最高副載波頻率的結合。如用曼切斯特編碼時,傳輸的最高數據率為424 kbit/ s,頻率為848 kHz,則諧振頻率為14. 408MHz。
在載波頻率為13. 56 MHz時,通過在TX1 和TX2 兩點測量天線線路的反射系數(即參數S11 )來手動調諧,直到天線電路的輸入阻抗達到目標,計算方程如下:

又有ZL = 50W,可以看出,要使(S11 ) = 50Ω, S11必須為0。
手動調諧即是交替不斷調整電容C1、C2 的值,同時觀察曲線變化,直到在所要求的頻率點S11等于0。圖2為某一天線電路在頻率在10~20MHz之間變化時,其反射系數的變化曲線,其中,標記13. 56MHz地點, S11值近似為0,達到了匹配要求。

納米軟件提出了一種自動匹配技術,其電路如圖3所示,主要包含測量電路,匹配電路和控制電路。因為手工匹配方法耗時長,且需要良好的意識和豐富的經驗來選擇合適的電容,另外必須配備一些昂貴的設備,如網絡分析儀或阻抗分析儀等。對于一些小公司來說,是不現實的。同時,一些手持式RF設備的發展使得手動匹配越來越不適應。對于這些移動設備,最理想的天線電路應該僅僅包含集成模塊,且隨著阻抗變化可以自動匹配。

2. 1 測試電路
手工匹配采用的是阻抗分析儀或者網絡分析儀,網絡分析儀是用定向耦合器來測量天線電路的反射系數。但使用定向耦合器有幾個主要的缺點,例如功率損耗大和很難嵌入到IC芯片。故而本文在電路中不使用耦合器,從圖3看出,測量電路包含以下4部分。
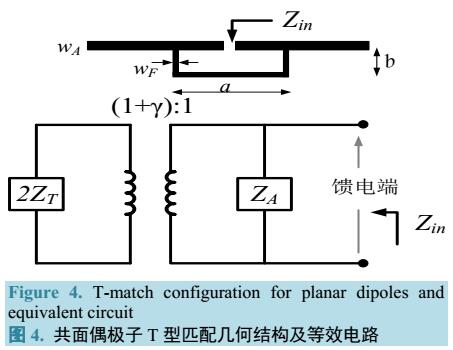
(1)測量電橋 用來測試天線的反射系數。主體部分為惠斯通電路,如圖4所示。其電路中的直流電源用波形產生器替代,用來生成13. 56 MHz的正弦載波信號。其中電阻R1、R2、R3 都為50 Ω。
**根據基爾霍夫定律,得I1 - I2 + Id = 0, I3 - IZ - Id =0, I1 R1 + I2 R2 - I3 R3 = IZ Z,得Z = R2*R3/R1= 50Ω。**
電橋平衡即Vd = 0,當Vd 的大小和相位都為0時,天線阻抗調諧完成。Vd 計算公式為: Vd = |V2 -VZ | ,V2 = I2 R2 , VZ = IZ Z。
(2)振幅測量電路 測量V2 和VZ 幅度, 并反饋到控制器。電路內部的整流器調整V2 和VZ 的幅度,消去輸入信號的負半波,為了滿足模數轉換電路的輸入范圍要求,最后得到的信號經過低通濾波和放大電路傳送到控制器。經過控制器模數轉換后,比較兩路信號的幅度,計算出Vd 的值。
較兩路信號的幅度,計算出Vd 的值。
(3)相位測量電路 測量V2 和VZ 的相位, 并反饋到控制器。
(4)振幅測量電路 測量V2 和VZ 的幅度,并反饋到控制器

在設計中用一個已經過手動調諧的天線電路來驗證測量電路。手動調諧電路以圖1 的電路為基礎,用微調電容器取代電容C1 和C2 ,將天線電路連接到測量電橋,調節微調電容器,使測量到信號的幅度和相位近似為0。然后在TX1、TX2 兩點測量天線的反射系數。測量結果如圖5所示,在頻率為13.
56MHz時,參數S11近似為0。這種檢查流程已成功經過幾種不同阻抗的RFID天線檢測,在頻率為13.
56MHz時,測試天線的S11參數偏差都大體相同。
這表明,這個偏差在測量電路中,是不可避免地,且不影響匹配。

匹配電路是在微控器作用下來自動匹配天線的阻抗。在設計中,用其它可調電容電路將圖1中電容C1 和C2 替換。通常有三種類型的替換方法:
(1) 微調電容器;(2)二極管電容;(3)電容陣列。
(2) 機械微調電容器既不是集成的也不是電可控的,二極管電容不能充分隔離信號電壓和控制電壓。
因此,最好的方法是用電容陣列,如圖6所示,由半導體開關控制。將圖1 中的C1、C2 用電容陣列取代。當電容值在1到50 pF之間時,開關選用了低電容DMOS開關。與普通開關不同, DMOS開關存在寄生效應。在斷開期間,開關引腳之間、信號引腳與地之間都存在這寄生電容。這些電容使得電容陣列的調諧范圍變窄,同樣也使天線阻抗的調諧范圍變窄。這個問題仍然有待于進一步的研究。

2. 3 控制器
控制器處理測量電路測到得數據,計算Vd 的值,并進一步控制DMOS開關,達到阻抗的匹配,同時它內部集成的模數轉換器可以使幅值和相位值數字化。在手動阻抗匹配中,是調整C1 和C2 使幅值和相位偏移盡可能的為0。用一個簡單的算術來說明這個思路,當每一個被測對象被認為是二維平面里的一個點時,該點到零點的距離d可以用公式計算: d2 =A2 +φ2。幅值A 作為橫坐標,相位偏移φ作為縱坐標。因此,控制器調諧算法就是要找到最短的路徑d。在實際計算中, 用該算法掃描所有的電容組合,以得到一組電容值使d2 最小,用這組數據來匹配阻抗。
3 功能驗證
設計完成后,用A,B兩種阻抗不同的天線測試了完整的調諧系統,每種天線測試2 到3 輪不等。
結果如圖7所示,對于A, B兩種天線的任何一種,都找到了最優C1 和C2 的組合。當頻率為13. 56MHz時,兩類天線的反射系數雖然與0點都有一定的偏差,但其偏差都在可接受范圍之內。

4 結論
納米軟件提出了一種適用于天線的阻抗自動匹配方法,基于此方法設計了集測量電路,匹配電路,控制電路于一體的集成RFID天線阻抗自動匹配虛擬系統。最后,通過實驗測試,該系統模型運作良好,大體實現了匹配要求。然而,電容陣列的優化,匹配算法的改進等還有待進一步的研究。
-
射頻識別
+關注
關注
8文章
577瀏覽量
38931 -
阻抗匹配
+關注
關注
14文章
351瀏覽量
30797 -
濾波電路
+關注
關注
46文章
635瀏覽量
69654 -
RFID讀寫器
+關注
關注
2文章
116瀏覽量
13053 -
定向耦合器
+關注
關注
2文章
65瀏覽量
15934
發布評論請先 登錄
相關推薦
基于RFID系統的雙頻微帶天線的設計
RFID讀寫器天線設計有什么實用的方法?
使用MFRC500設計RFID讀寫器的天線及匹配電路的詳細資料說明

RFID讀寫器的使用方法





 工商網監
工商網監
評論