

機(jī)器人具有高度非線性,強(qiáng)時(shí)變以及強(qiáng)耦合等動(dòng)力學(xué)特性,為了提高機(jī)器人控制的性能,研究人員提出了基于模型的控制(Model Based Control)方法。
在機(jī)器人研究領(lǐng)域,多種常見的高性能機(jī)器人控制器如計(jì)算力矩控制(Compute Torque Control)和阻抗控制(ImpedanceControl)等均需要使用機(jī)器人動(dòng)力學(xué)模型。
機(jī)器人系統(tǒng)模型包括機(jī)器人動(dòng)力學(xué)模型和機(jī)器人運(yùn)動(dòng)學(xué)模型,不精確動(dòng)力學(xué)模型可能會(huì)導(dǎo)致控制性能的降低,甚至?xí)鹣到y(tǒng)的不穩(wěn)定。
常用的機(jī)器人動(dòng)力學(xué)建模方法包括拉格朗日動(dòng)力學(xué)建模方法和牛頓 - 歐拉動(dòng)力學(xué)建模方法等。通過 “虛位移” 和 “ 虛功” 的概念,引入廣義坐標(biāo)來減少運(yùn)動(dòng)方程和約束方程的數(shù)量,在動(dòng)力學(xué)普遍方程的基礎(chǔ)上建立了拉格朗日方程。
漢密爾頓基于著名的漢密爾頓原理,在動(dòng)量和動(dòng)能關(guān)系的基礎(chǔ)上建立了哈密爾頓運(yùn)動(dòng)方程,為拉格朗日方程提供了另一種推導(dǎo)方法。
設(shè)計(jì)基于模型的控制器要求建立的模型具有足夠高的計(jì)算效率,可以使用黎曼幾何和李群李代數(shù)的相關(guān)概念描述開環(huán)和閉環(huán)機(jī)器人系統(tǒng)的運(yùn)動(dòng)學(xué)方程,推導(dǎo)出遞推形式的動(dòng)力學(xué)方程。在建立動(dòng)力學(xué)模型過程中,獲取精確的機(jī)器人模型參數(shù)具有重要作用。
需要引入機(jī)器人動(dòng)力學(xué)模型參數(shù)辨識(shí)的原因:動(dòng)力學(xué)參數(shù)因?yàn)槭艿綔y量手段以及機(jī)械結(jié)構(gòu)的限制,通過參數(shù)估計(jì)來獲得相對(duì)準(zhǔn)確的動(dòng)力學(xué)參數(shù):基于最小二乘法,神經(jīng)網(wǎng)絡(luò)控制逼近模型中的未建模動(dòng)態(tài)。
無法確保估計(jì)參數(shù)的收斂性,而重要的是消除非線性系統(tǒng)中建模誤差帶來的影響。
阻抗/導(dǎo)納控制是希望機(jī)器人呈現(xiàn)質(zhì)量-阻尼-彈簧的二階系統(tǒng)的動(dòng)態(tài)特性,機(jī)器人阻抗控制是間接地控制機(jī)器人和環(huán)境間的作用力,其設(shè)計(jì)思想是建立機(jī)器人末端作用力與其位置偏差之間的動(dòng)態(tài)關(guān)系通過控制機(jī)器人位移而達(dá)到控制末端作用力的目的保證機(jī)器人在受約束方向保持期望的接觸力。
而傳統(tǒng)的機(jī)器人力位置控制研究難點(diǎn):提高系統(tǒng)對(duì)干擾系統(tǒng)模型誤差、外界千擾以及測量噪聲影響的魯棒性,阻抗控制方法受系統(tǒng)動(dòng)力學(xué)模型、外界干擾、力測量影響小。
目的:阻抗控制旨在在不確定的環(huán)境下實(shí)現(xiàn)預(yù)期的機(jī)械相互作用。
阻抗控制目前研究的問題:耦合穩(wěn)定性分析、力跟蹤阻抗控制、混合阻抗控制、魯棒阻抗控制、自適應(yīng)阻抗控制、學(xué)習(xí)阻抗控制等。
阻抗控制和導(dǎo)納控制的主要區(qū)別為如下因果關(guān)系:阻抗控制是基于測量的位置(差值)來控制外力,而導(dǎo)納控制則是基于測量的外力(差值)來控制位置。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29728瀏覽量
212813 -
動(dòng)力學(xué)
+關(guān)注
關(guān)注
0文章
108瀏覽量
17272 -
阻抗控制
+關(guān)注
關(guān)注
1文章
57瀏覽量
10851
發(fā)布評(píng)論請(qǐng)先 登錄
《工業(yè)機(jī)器人》,蔣剛編著的,附下載。
先進(jìn)機(jī)器人控制
請(qǐng)問各位在labview MathScript節(jié)點(diǎn)中 以下這個(gè)機(jī)器人的動(dòng)力學(xué)公式應(yīng)該怎么編寫呢?
機(jī)器人工具箱中的常用函數(shù)介紹
一個(gè)描述機(jī)器人剛體動(dòng)力學(xué)的系統(tǒng)模型
PDF——工業(yè)機(jī)器人技術(shù)及應(yīng)用
基于Matlab和VR技術(shù)的移動(dòng)機(jī)器人建模及仿真
空間柔性機(jī)器人動(dòng)力學(xué)分析的快速積分算法
跨越式高壓輸電線路巡線機(jī)器人動(dòng)力學(xué)研究
《機(jī)器人學(xué)》—運(yùn)動(dòng)控制與動(dòng)力學(xué)
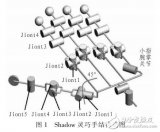
Shadow仿人靈巧手動(dòng)力學(xué)研究
水下機(jī)器人技術(shù)解析之水動(dòng)力學(xué)系數(shù)
機(jī)器人原理與應(yīng)用之機(jī)器人動(dòng)力學(xué)
綜合車輛動(dòng)力學(xué)仿真軟件ModelBase的簡單介紹
基于車輛動(dòng)力學(xué)模型的橫向控制






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論