 IMU/GNSS與車體外參標定
IMU/GNSS與車體外參標定
作為無人車以及智能機器人而言,在裝配過程中各個傳感器之間的外參標定一直是比較頭疼的問題。這里作者也系統的學習了一下,傳感器的外參標定和在線標定問題。
下圖是我們常用的幾個坐標系,而對于常用的外參問題經常是IMU/GNSS與車體坐標的外參、Lidar和Camera的外參、Lidar和Lidar的外參、Lidar和IMU/GNSS的外參。

- 離線外參標定
1.1 IMU/GNSS與車體外參標定
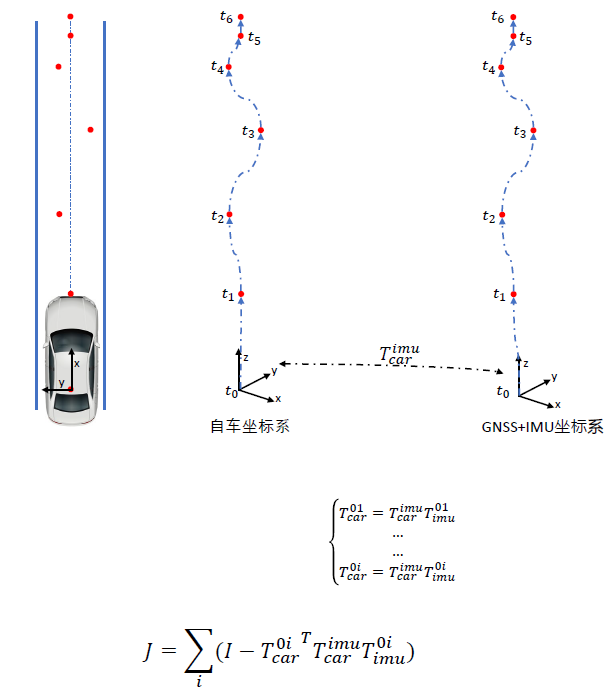
這個IMU/GNSS與車體外參標定如下圖所示,主要需要獲取**T_{car}^{imu}**坐標系,這一類IMU/GNSS設備通過內部的緊耦合可以綜合輸出一系列校準后的位姿信息。
同時IMU的輸出頻率是很高的,所以通過插值的形式可以有效地提高整體綜合的頻率輸出。
為了去標定外參,一般的方法是獲取位姿運動的位姿序列,并通過GNSS/IMU來觀測車輛自身的運動(有的時候我們可以通過繞圈的形式+手持點測繪來對車輛自身坐標和GNSS坐標進行匹配計算)。
通過獲取很多個觀測和gnss的轉換可以得到cost fuction參與到里面去優化。
這里我們也給出了基于車體坐標系odom和IMU的位姿聯合矯正的相關代碼,考慮到IMU和輪速計的數據收集過程中本身在時間上就很難做到完全對齊,此時引入時間偏移(delta_t)用于表示兩者采集時間片之間的誤差,通過循環標定新產生的輪速計數據和原先的IMU
數據,選取誤差最小的結果作為最終兩者之間的標定,相應的(delta_t)即認為兩者采集時間的偏差。
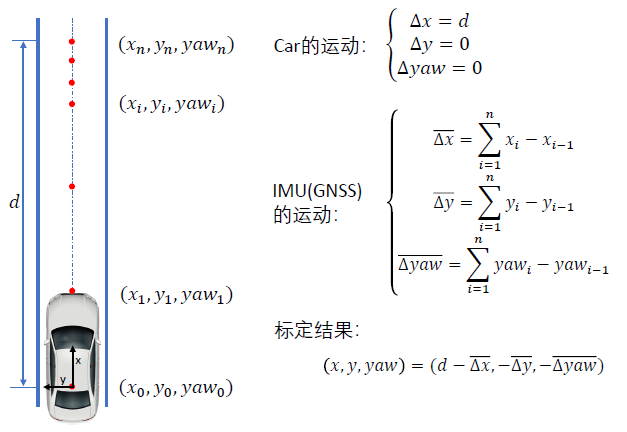
其實作為車輛來說,在平面測量后,其實只需要觀測x,y,yaw即可。所以可以將用直線來做約束和校準,得到下圖的公式:

聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
檢測
+關注
關注
5文章
4480瀏覽量
91443 -
GNSS
+關注
關注
9文章
767瀏覽量
47898 -
IMU
+關注
關注
6文章
306瀏覽量
45727
發布評論請先 登錄
相關推薦

3DM-GX5-15 慣性測試單元IMU
3DM-GX5-15 慣性測試單元IMU3DM-GX5-15 慣性測試單元IMU 3DM-GX5-15 慣性測試單元IMU 詳詢請致電:***工作q:11398788543DM-GX5-15】
發表于 12-07 09:05
IMU 3DM-GX5-25
慣性傳感器,所有產品重量不超過20g,且體積小巧,功耗低,能夠穩定的為客戶輸出各種類別的工業級慣性參數。該系列目前有組合慣導(GNSS/INS),航姿參考(AHRS),慣性測量單元(IMU),廣泛應用
發表于 12-16 14:18
IMU誤差來源/表達式/標定
\omegakω?,c ω c_\omegacω?分別表示加速度計與陀螺儀的溫漂系數。三、IMU標定在SLAM領域中,單純的視覺傳感器在現階段無法通過計算機視覺完成精確的位姿計算,一般采用imu作為補充,進行多
發表于 12-24 15:56
基于CP-132UL V2的標定測試軟件實現完成對IMU的標定工作
針對IMU的野外測試環境限制,需改進其測試方法,則需用新的硬件采集電路實現。根據實際需要,在CP-132ULV2數據采集板的基礎上,采用VC6.0設計了針對野外測試環境所需的測試軟件,從而實現在惡劣環境下完成對IMU的標定工作。
發表于 08-13 15:19
?1250次閱讀
GNSS+IMU+MM車載高精度組合導航定位系統對比分析
干擾,導致GNSS無定位結果或定位精度差。這是“有源定位”固有的缺點,無法從算法上來克服。針對這個問題,以GNSS+IMU等多傳感器融合方案越來越受到重視,因為“無源定位”的IMU恰好可以彌補衛星定位的短板。 1.基礎原理 導航

GNSS+IMU+MM車載組合導航系統解決方案
GNSS無定位結果或定位精度差。這是“有源定位”固有的缺點,無法從算法上來克服。針對這個問題,以GNSS+IMU等多傳感器融合方案越來越受到重視,因為“無源定位”的IMU恰好可以彌補衛星定位的短板。
發表于 09-17 14:40
?2169次閱讀
高精度IMU在AVP場景中的應用
IMU提供相對定位信息,并不能提供所在具體位置信息,因此,高精度的IMU與GNSS導航系統二者組合使用,可以獲取絕對位置的信息,避免車輛在信號失效的情況下出現定位精度降級。
發表于 09-30 12:39
?964次閱讀
激光雷達相機外參標定相關內容
來自CMU Robotics Institute, 已知最早3D Laser與相機標定的工作(2005年),基于matlab的圖形用戶界面,進行激光雷達相機外參標定。

校準多個慣性測量單元(IMU)和各個軸的外參
越來越多的機器人系統配備了多個慣性測量單元(IMU)。由于競爭性目標,當用于控制時期望靠近重心,或者在與外部感知傳感器集成時為了獲得無阻礙的視野,單個IMU經常被安裝在相當遠的距離上。

車輛中的標定概述
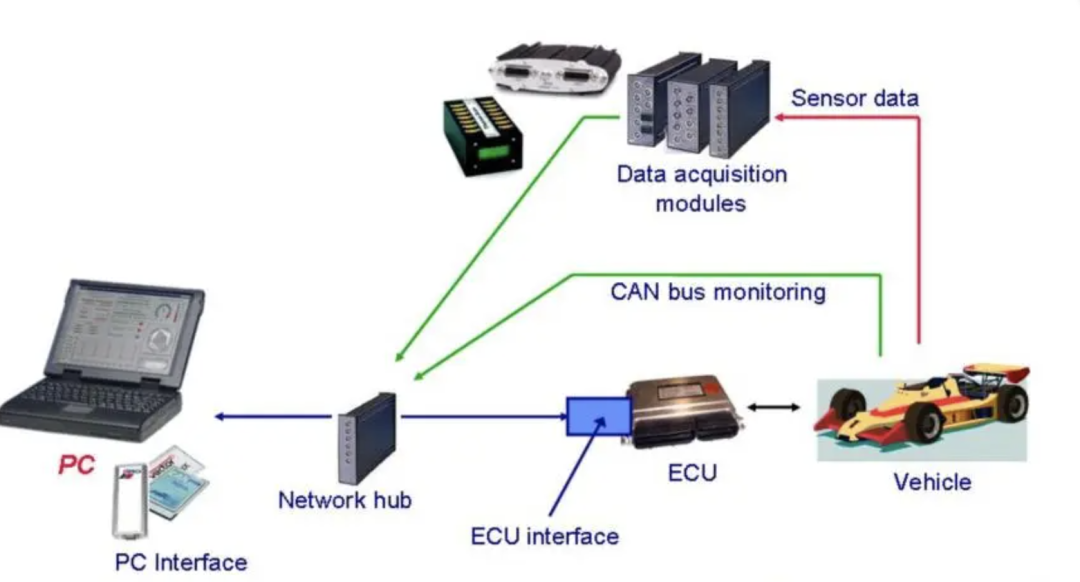
標定概述 我們先看一張圖,做過調試的同學額應該很熟悉,出問題了,要實車調試,我們帶著電腦和canoe下去調試了。只不過這張圖是講標定的,我們通過can或者以太網接口卡,把標定參數刷到我的Ecu中
汽車電子激光雷達和相機的自動在線外參標定技術
為了解決外參逐漸漂移的問題,提出了一種基于線的方法,可以在真實場景中實現激光雷達和相機的自動在線外參標定。首先,從點云和圖像中提取和過濾線特征。然后,利用自適應優化方法提供精確的外部參數。然后在KITTI基準上用地面真值對其進行
發表于 08-31 10:50
?1068次閱讀

淺析傳感器的外參標定和在線標定問題
作為無人車以及智能機器人而言,在裝配過程中各個傳感器之間的外參標定一直是比較頭疼的問題。這里作者也系統的學習了一下,傳感器的外參標定和在線標定
發表于 11-20 15:45
?840次閱讀






 工商網監
工商網監
評論