


一、死區時間定義
死區時間,也稱為互鎖延時時間(互鎖:即互相掣肘,對開關管來說就是Q1開通時候,Q2通過結合Q1控制邏輯必須關閉),是指高側(橋臂上管Q1)和低側(橋臂下管Q2)功率晶體管同時處于關閉的時間段。Q1和Q2的任何重疊導通將導致大電流流過功率管。即我Q1還沒有關斷,你Q2就來了(開通了),這豈不是很危險的事。
二、死區時間的意義
死區時間是保證一個橋臂(上管Q1和下管Q2)不會直通的保障條件,這個死區時間一定是根據正常工作條件下得到的最嚴酷的值而且會認為添加裕量。
采用IGBT器件的電氣設備,為了保證可靠地運行,應當避免橋臂直通。橋臂直通將產生不必要的額外損耗,甚至引起IGBT發熱失控。其結果將可能導致IGBT器件和整個電氣設備的損壞。
三、死區時間設定的原理
原理還是從這句話開始,“ 我Q1還沒有關斷,你Q2就來了(開通了),這豈不是很危險的事 。 ”
波形表示:如果沒有死區,Q1沒有關斷,Q2隨即開通,必定導致一個橋臂上Q1和Q2同時導通,發生直通,出現大電流,引起極端過熱,極大可能損壞IGBT。
1 、控制死區時間公式的原理
控制死區時間指加入在控制算法中以使得器件獲得足夠有效的死區時間。設置控制死區時間的目的是為了確保有效死區時間總是足夠的。 計算控制死區時間總是基于最壞的情況考慮 。計算控制死區公式:
S是安全裕量系數**,通常可選1.5,這樣死區時間的安全裕量為50%,其它參數參照下面定義。**
上式中,死區時間的定義,包含兩部分參數,其中一部分是IGBT開關特性決定的,也就是我們測試系統的雙脈沖得到的參數;另一部分則是代表IGBT驅動器特性,是你選擇的驅動器決定的。
那么為什么會有如下這樣包含開關特性參數的一個式子?
2 、情況分析
我們接著從下面舉例波形看, Q1我可以存在關斷最快的情況,那么相對Q2你可以開通快一些 ,這也說明我的系統死區可以很小。但是實際狀況中,最惡劣情況就是Q1也會存在關斷很慢,那么Q1開通就要慢一些,并且是在最慢的情況,就是我Q1關斷后,你再來, 那么Q1何時來對于Q1和Q2直通風險最大,當然是你Q2開通最快,也就是開通延時最小的情況下 ,那么系統預留的最小死區就是如下的差值,如下圖示意“灰色”和“紅色”
當tdon_min延時為零時,這個值達到最大, 也就需要我們預留的控制死區越大 。
至于tf,是指(電流)下降時間,這個對IGBT模塊,尤其是感性負載,這個值就較大,看實際定義波形,關斷時,由于感性負載相對于VCE下降的滯后性,加之IGBT的拖尾電流,死區也要考慮這個值。下圖是幾個時間的清晰定義。
所以,這個式子是根據實際的一種推導,并非是無根據的。
3 、參數定義說明
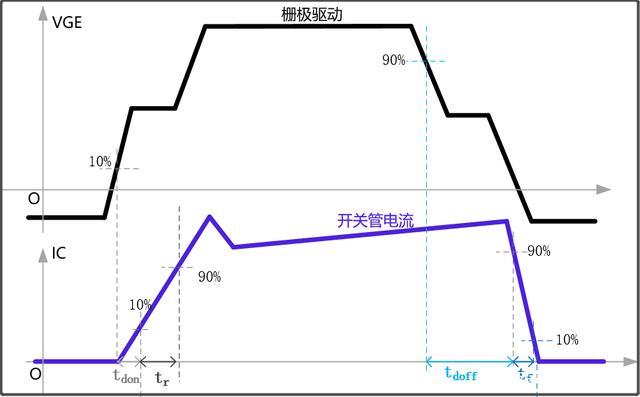
上面我們提到死區是開關特性和驅動器特性共同的結果,首先第一部分式子是IGBT開關特性參數,如下圖定義,這個定義是開關管在感性負載下的定義,可見IGBT模塊手冊說明。
還是搞清楚這幾個時間參數的意義,下面我們加以文字解釋
**tdon:**開通延時,由柵極電壓VGE的10%到集極電流的10%
tr :上升時間,由集極電流Ic的10%到Ic的90%
tdoff :關斷延時,由柵極電壓VGE的90%到集極電流的90%
tf :下降時間,由集極電流Ic的90%到Ic的10%
手冊中的參數測定:
以上參數定義圖也是根據IEC-60747-9-2007對開關特性的定義,這里是感性負載下對時間開關特性的定義
關斷特性參數定義
開通特性參數定義
:
**tdon:**開通延時,由柵極電壓VGE的10%到集極電流的10%
tr :上升時間,由集極電流Ic的10%到Ic的90%
tdoff :關斷延時,由柵極電壓VGE的90%到集極電流的90%
tf :下降時間,由集極電流Ic的90%到Ic的10%
驅動電路參數 ,通常通常脈沖變壓器形式的IGBT驅動器,下式中差值基本接近零,可以忽略而對于光耦形式的驅動器,這個值差異會大一些,因為一個驅動器通常Q1和Q2是對稱的,這兩個差值依舊表示上管Q1和下管Q2的差值,我們還是把“ 我Q1還沒有關斷,你Q2就來了,這豈不是很危險的事 ”,而這里特指由驅動引起的死區時間。
驅動電路常用構架,信號經過電子器件傳輸后,總會存在延時和失真,并且上升和下降的延時和失真總是不太一樣。 驅動器不帶IGBT工作的情況,稱為驅動器空載 。
例如,如下是某脈沖變壓器傳輸信號的IGBT驅動器參數,這里tPHL_max是驅動器的關斷延時tdoff,tPLH_min是指驅動器的開通延時tdon,具體定義見后面解釋。
如下是某光耦傳輸信號的IGBT驅動器參數,如果只給了典型值,那么對評估死區時間意義并不大
其實光耦傳輸信號的驅動器,延時值的大比重是由光耦引起的,tPHL是指輸出低電平的時間,這個其實就是關斷延時
P:代表延時“Propagation”
H:代表高電平“High”
L:代表低電平“Low”
PHL可以表示為H→L,就高電平向低電平變化,這個也表述信號由高變低的過程,正好類似關斷延時,只不過驅動器或者光耦定義就用tPHL定義了,同理tPLH則相反,如下是某正邏輯光耦的定義圖。
正邏輯光耦:輸入和輸出電平保持一致,通常是輸入高電平,輸出就是高電平
常見正邏輯光耦:HCPL-3120和HCNW2211
tPHL:邏輯低電平輸出傳輸延時
tPLH:邏輯高電平輸出傳輸延時
反邏輯光耦:輸入和輸出電平相反,通常是輸入高電平,輸出就是低電平
常見正邏輯光耦: HCNW2611、6N137、PC817等
四、死區計算舉例
某驅動器參數
IGBT模塊手冊數據
不同結溫下的死區時間:
25 ℃**情況下的死區時間:**td=[(0.87-0.20+0.2)+(0.5-0.1)]*1.5=1.9us
150 ℃**情況下的死區時間:**td=[(0.97-0.21+0.23)+(0.5-0.1)]*1.5=2.1us
為了保證系統可靠,選大死區的一種結果
五、總結
(1)死區的來源是有依據可循的,掌握“ Q1還沒有關斷, Q2就不能開通的原則 ”死區針對上下管橋臂的直通問題。
**(2)**死區時間是多個參數的共同結果,因為開關參數本身就是器件結溫、母線大小和通過電流的變量,需要熟讀器件數據手冊。
(3)死區時間,不僅關注實際開關特性,同時也要關注你選擇的驅動器特性。
(4)結合實際死區的意義理解開關特性參數的定義。
-
驅動器
+關注
關注
54文章
8706瀏覽量
150193 -
IGBT
+關注
關注
1279文章
4077瀏覽量
255011 -
脈沖變壓器
+關注
關注
4文章
111瀏覽量
21801 -
死區時間
+關注
關注
0文章
10瀏覽量
14175 -
柵極電壓
+關注
關注
0文章
70瀏覽量
13042
發布評論請先 登錄
基于Matpower的電力系統潮流計算設計原理是什么
基于Matpower的電力系統潮流計算原理及仿真設計
基于matlab電力系統潮流計算相關資料分享
基于MATLAB的電力系統短路計算
基于Matlab的電力系統潮流計算
基于Matlab的電力系統潮流編程如何去計算?
單相和三相電力系統潮流計算的認識 精選資料推薦
基于Matlab計算程序的電力系統運行分析
對電力系統計算機應用存在問題及解決方法進行了探討
開關死區對SPWM逆變器輸出電壓波形的影響
開關死區對SPWM逆變器輸出電壓波形的影響






 工商網監
工商網監

評論