") FreeRTOS系列技術文章:上下文切換
FreeRTOS系列技術文章:上下文切換
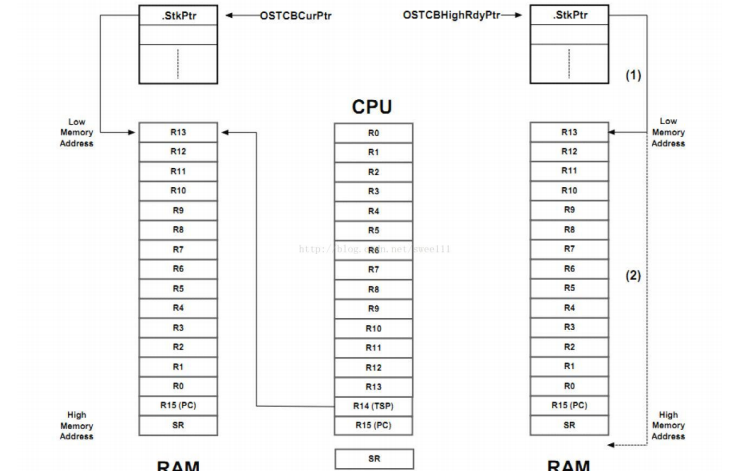
嵌入式實時操作系統(tǒng)(RTOS)中的上下文切換是指保存和恢復任務的狀態(tài),以使調度程序能夠切換到另一個任務,從而促進多任務處理。
目的:
通過在任務之間高效切換來啟動多任務處理,提供并發(fā)執(zhí)行。
任務狀態(tài)組件:
程序計數(shù)器(PC)、寄存器、堆棧指針(SP)、狀態(tài)寄存器/標志。
上下文切換中的步驟:
保存當前任務狀態(tài)
更新任務控制塊(TCB)
選擇下一個任務
恢復下一個任務的狀態(tài)
上下文切換的開銷:
時間和資源的開銷
RTOS旨在最大限度地減少實時響應的開銷
搶占:
搶占允許中斷更高優(yōu)先級任務的任務
自愿或非自愿的搶占
頻率和影響:
頻繁使用多任務系統(tǒng)
影響取決于RTOS和調度器的效率
實時性的考慮:
滿足截止日期的確定性時間
解決優(yōu)先級反轉
示例場景:
傳感器讀取任務切換出去,以允許嵌入式系統(tǒng)中的數(shù)據(jù)處理任務。
ISR中的上下文切換:
上下文開關可能發(fā)生在ISR中,需要特殊處理以保持系統(tǒng)的穩(wěn)定。
// LED切換的任務功能
void vLEDTask(void *pvParameters) {
while (1) {
// Toggle LED state
// Example: Toggle STM32 LED connected to GPIO_PIN_13
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_13);
// Delay for 500 ms
vTaskDelay(pdMS_TO_TICKS(500));
}
}
// Task function for UART communication
void vUARTTask(void *pvParameters) {
while (1) {
// Implement UART communication task
// Delay for 1000 ms
vTaskDelay(pdMS_TO_TICKS(1000));
}
}
int main(void) {
// STM32 HAL initialization
// Create an LED task
xTaskCreate(vLEDTask, "LED Task", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
// Create a UART task
xTaskCreate(vUARTTask, "UART Task", configMINIMAL_STACK_SIZE, NULL, tskIDLE_PRIORITY + 1, NULL);
// Start FreeRTOS scheduler
vTaskStartScheduler();
// Should not reach here
while (1) {
}
}
這個例子演示了一個簡單的基于FreeRTOS的STM32項目,有兩個任務:一個是切換LED,另一個是處理UART通信。這些任務通過上下文切換同時運行,展示了嵌入式系統(tǒng)中多任務處理的基礎知識。任務的實際實施取決于具體的應用要求。
-
嵌入式
+關注
關注
5082文章
19104瀏覽量
304815 -
操作系統(tǒng)
+關注
關注
37文章
6801瀏覽量
123283
原文標題:FreeRTOS系列技術文章:上下文切換
文章出處:【微信號:麥克泰技術,微信公眾號:麥克泰技術】歡迎添加關注!文章轉載請注明出處。
發(fā)布評論請先 登錄
相關推薦
編寫一個任務調度程序,在上下文切換后遇到了一些問題求解
關于進程上下文、中斷上下文及原子上下文的一些概念理解
BT堆棧上下文切換
多線程如何實現(xiàn)上下文切換
上下文切換簡介
上下文切換的情況發(fā)生
ucos上下文該怎么切換?
基于cortex-m3的rt-thread系統(tǒng)如何實現(xiàn)線程上下文切換呢
Cortex-M4在線程上下文切換中的優(yōu)化
討論ARM mbed OS(RTX) 的上下文切換
rt-thread上下文切換函數(shù)的意義在哪?
中斷中的上下文切換詳解
CPU上下文切換的詳細資料講解
如何分析Linux CPU上下文切換問題
Linux技術:什么是cpu上下文切換






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論