") PCL中非均勻體素采樣介紹
PCL中非均勻體素采樣介紹
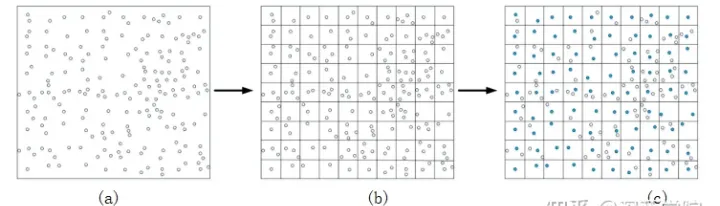
非均勻體素采樣
SamplingSurfaceNormal,將輸入空間劃分為網(wǎng)格,直到每個(gè)網(wǎng)格中最多包含N個(gè)點(diǎn),并在每個(gè)網(wǎng)格中隨機(jī)采樣點(diǎn)。 使用每個(gè)網(wǎng)格的N個(gè)點(diǎn)計(jì)算法線。 在網(wǎng)格內(nèi)采樣的所有點(diǎn)都分配有相同的法線。
PointCloud < PointNormal >::Ptr incloud (new PointCloud < PointNormal > ());
PointCloud < PointNormal > outcloud;
//Creating a point cloud on the XY plane
for (float i = 0.0f; i < 5.0f; i += 0.1f)
{
for (float j = 0.0f; j < 5.0f; j += 0.1f)
{
PointNormal pt;
pt.x = i;
pt.y = j;
pt.z = 1;
incloud- >points.push_back (pt);
}
}
incloud- >width = 1;
incloud- >height = uint32_t (incloud- >points.size ());
pcl::SamplingSurfaceNormal < pcl::PointNormal > ssn_filter;
ssn_filter.setInputCloud (incloud);
ssn_filter.setRatio (0.3f);
ssn_filter.filter (outcloud);
// All the sampled points should have normals along the direction of Z axis
for (unsigned int i = 0; i < outcloud.points.size (); i++)
{
EXPECT_NEAR (outcloud.points[i].normal[0], 0, 1e-3);
EXPECT_NEAR (outcloud.points[i].normal[1], 0, 1e-3);
EXPECT_NEAR (outcloud.points[i].normal[2], 1, 1e-3);
}
6. 半徑濾波器采樣
對(duì)整個(gè)輸入迭代一次,對(duì)于每個(gè)點(diǎn)進(jìn)行半徑R鄰域搜索,如果鄰域點(diǎn)的個(gè)數(shù)低于某一閾值,則該點(diǎn)將被視為噪聲點(diǎn)并被移除。
流程:讀入點(diǎn)云→創(chuàng)建半徑濾波器對(duì)象→設(shè)置離群點(diǎn)閾值→執(zhí)行下采樣→保存采樣結(jié)果
pcl::PointCloud< pcl::PointXYZ >::Ptr pcl_cloud_ptr(pcl_cloud);
boost::shared_ptr< pcl::PointCloud< pcl::PointXYZ >> pcl_vg_cloud(new pcl::PointCloud< pcl::PointXYZ >());
pcl::PointCloud< pcl::PointXYZ >::Ptr pcl_vg_cloud_ptr(pcl_vg_cloud);
boost::shared_ptr< pcl::PointCloud< pcl::PointXYZ >> pcl_ror_cloud(new pcl::PointCloud< pcl::PointXYZ >());
pcl::PointCloud< pcl::PointXYZ >::Ptr pcl_ror_cloud_ptr(pcl_ror_cloud);
//Use VoxelGrid to make points sparse
pcl::VoxelGrid< pcl::PointXYZ > sor;
sor.setInputCloud (pcl_cloud_ptr);
sor.setLeafSize (0.08, 0.1, 0.1);
sor.filter (*pcl_vg_cloud_ptr);
//Use RadiusOutlierRemoval to remove the point whitch is far away to others
pcl::RadiusOutlierRemoval< pcl::PointXYZ > outrem;
outrem.setInputCloud(pcl_vg_cloud_ptr);
outrem.setRadiusSearch(0.5);
outrem.setMinNeighborsInRadius (3);
outrem.filter (*pcl_ror_cloud_ptr);
//transfrom and publish
sensor_msgs::PointCloud2Ptr msg_pointcloud(new sensor_msgs::PointCloud2);
pcl::toROSMsg(*pcl_ror_cloud, *msg_pointcloud);
msg_pointcloud- >header.frame_id = optical_frame_id_[RS_STREAM_DEPTH];;
msg_pointcloud- >header.stamp = ros::Time::now();
聲明:本文內(nèi)容及配圖由入駐作者撰寫(xiě)或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問(wèn)題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
plc
+關(guān)注
關(guān)注
5012文章
13304瀏覽量
463545 -
采樣
+關(guān)注
關(guān)注
1文章
121瀏覽量
25568
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
labview能否對(duì)非均勻采樣數(shù)據(jù)進(jìn)行處理
labview能不能恢復(fù)非均勻采樣數(shù)據(jù)的波形,進(jìn)而對(duì)其進(jìn)行頻譜測(cè)量、FFT?
發(fā)表于 01-15 13:31
如何實(shí)現(xiàn)非均勻采樣
用NI數(shù)據(jù)采集卡,如何用LabVIEW進(jìn)行非均勻采樣,并且對(duì)所得到的數(shù)據(jù)進(jìn)行運(yùn)算~請(qǐng)高手指點(diǎn)
發(fā)表于 04-16 20:26
PCL點(diǎn)云庫(kù)介紹及項(xiàng)目配置方式
關(guān)于PCL點(diǎn)云庫(kù),大家百度的時(shí)候可以找到很多相關(guān)的介紹,反正一堆專業(yè)性概念,相關(guān)的技術(shù)層面以及一些強(qiáng)大的應(yīng)用敘述云云,不過(guò)關(guān)于這些小編實(shí)在不感冒,能先把這個(gè)工具好好用起來(lái)再說(shuō)吧。關(guān)于PCL相關(guān)的論壇
發(fā)表于 07-02 07:44
體素超材料 光啟技術(shù)
體素超材料 光啟技術(shù),浪花是如何形成的?如果把浪花拆解開(kāi)來(lái),它只剩下一個(gè)個(gè)水分子。如果再把這些水分子聚集起來(lái),在潮汐力的作用下,浪花才能“涌現(xiàn)”出來(lái)。涌現(xiàn),也是智慧誕生的方式。由簡(jiǎn)單的元素和簡(jiǎn)單的聯(lián)接,構(gòu)成一...
發(fā)表于 07-12 07:28
PCL6143運(yùn)動(dòng)控制器原理及應(yīng)用
PCL6143運(yùn)動(dòng)控制器的原理及應(yīng)用 可以用于設(shè)計(jì)開(kāi)發(fā)相應(yīng)的芯片電路。介紹了PCL6143 的功能結(jié)構(gòu)、主要寄存器以及指令系統(tǒng)。設(shè)計(jì)了一款基于PC104總線的四軸運(yùn)動(dòng)控制卡, 介紹了如
發(fā)表于 09-26 08:14
非均勻采樣的頻譜研究
非均勻采樣的一個(gè)很大的優(yōu)點(diǎn)就是它具有抗頻率混疊的性能[ ],首先從均勻采樣討論由采樣而引起的頻譜混疊現(xiàn)象,在
發(fā)表于 03-13 16:18
?18次下載

一種新的非均勻采樣信號(hào)的離散傅里葉變換方法
針對(duì)偽隨機(jī)(PN)碼調(diào)制的多普勒激光雷達(dá)中固有的對(duì)外差信號(hào)不能等間隔采樣的問(wèn)題,提出一種新的非均勻采樣信號(hào)的離散傅里葉變換(DFT)方法。首先,給出距離速度同步測(cè)量多普勒激光雷達(dá)系統(tǒng)模型,指出對(duì)外
發(fā)表于 12-23 11:40
?0次下載
一種基于點(diǎn)云的Voxel(三維體素)特征的深度學(xué)習(xí)方法
特征學(xué)習(xí)網(wǎng)絡(luò)的結(jié)構(gòu)如下圖所示,包括體素分塊(Voxel Partition),點(diǎn)云分組(Grouping),隨機(jī)采樣(Random Sampling),多層的體
空間曲線基于內(nèi)在幾何量的均勻采樣方法
為解決均勻參數(shù)采樣在許多情況下得到質(zhì)量不高的采樣點(diǎn),進(jìn)而生成不理想的B樣條擬合曲線,提出空間曲線基于內(nèi)在幾何量的均勻采樣方法,以獲得給定總數(shù)
發(fā)表于 04-22 11:34
?4次下載

一種空間曲線基于內(nèi)在幾何量的均勻采樣方法
為解決均勻參數(shù)采樣在許多情況下得到質(zhì)量不高的采樣點(diǎn),進(jìn)而生成不理想的B樣條擬合曲線,提出空間曲線基于內(nèi)在幾何量的均勻采樣方法,以獲得給定總數(shù)
發(fā)表于 04-29 14:11
?7次下載

什么是中頻采樣?什么是IQ采樣?中頻采樣和IQ采樣的比較和轉(zhuǎn)換
什么是中頻采樣?什么是IQ采樣?中頻采樣和IQ采樣的比較和轉(zhuǎn)換? 中頻采樣和IQ采樣是數(shù)字信號(hào)處
PCL中基礎(chǔ)下采樣介紹
顧名思義,隨機(jī)下采樣就似乎在原始點(diǎn)云中隨機(jī)采樣一定點(diǎn)數(shù)的點(diǎn)。這種方法最終得到的點(diǎn)云數(shù)量也是固定的。 pcl::PointCloud ::Ptr cloud_sub( new pcl
PCL中最遠(yuǎn)點(diǎn)采樣是什么
最遠(yuǎn)點(diǎn)采樣(Farthest Point Sampling) 這里我們來(lái)單獨(dú)看一下調(diào)用代碼,這里可以看到PCL中支持直接調(diào)用farthest_sampling這個(gè)函數(shù)可以實(shí)現(xiàn)最遠(yuǎn)點(diǎn)采樣。 最遠(yuǎn)點(diǎn)
PCL中法線空間采樣介紹
法線空間采樣 NormalSpaceSampling即:法線空間采樣,它在法向量空間內(nèi)均勻隨機(jī)抽樣,使所選點(diǎn)之間的法線分布盡可能大,結(jié)果表現(xiàn)為地物特征變化大的地方剩余點(diǎn)較多,變化小的地方剩余點(diǎn)稀少





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論