 機器人建模方法和組成
機器人建模方法和組成
URDF:機器人建模方法
ROS是機器人操作系統,當然要給機器人使用啦,不過在使用之前,還得讓ROS認識下我們使用的機器人,如何把一個機器人介紹給ROS呢?
為此,ROS專門提供了一種機器人建模方法——URDF,用來描述機器人外觀、性能等各方面屬性。
機器人的組成
建模描述機器人的過程中,我們自己需要先熟悉機器人的組成和參數,比如機器人一般是由硬件結構、驅動系統、傳感器系統、控制系統四大部分組成,市面上一些常見的機器人,無論是移動機器人還是機械臂,我們都可以按照這四大組成部分進行分解。
硬件結構就是底盤、外殼、電機等實打實可以看到的設備;
驅動系統就是可以驅使這些設備正常使用的裝置,比如電機的驅動器,電源管理系統等;
傳感系統包括電機上的編碼器、板載的IMU、安裝的攝像頭、雷達等等,便于機器人感知自己的狀態和外部的環境;
控制系統就是我們開發過程的主要載體了,一般是樹莓派、電腦等計算平臺,以及里邊的操作系統和應用軟件。
機器人建模的過程,其實就是按照類似的思路,通過建模語言,把機器人每一個部分都描述清楚,再組合起來的過程。
URDF
ROS中的建模方法叫做URDF,全稱是統一機器人描述格式,不僅可以清晰描述機器人自身的模型,還可以描述機器人的外部環境,比如這里的桌子,也可以算作一個模型。
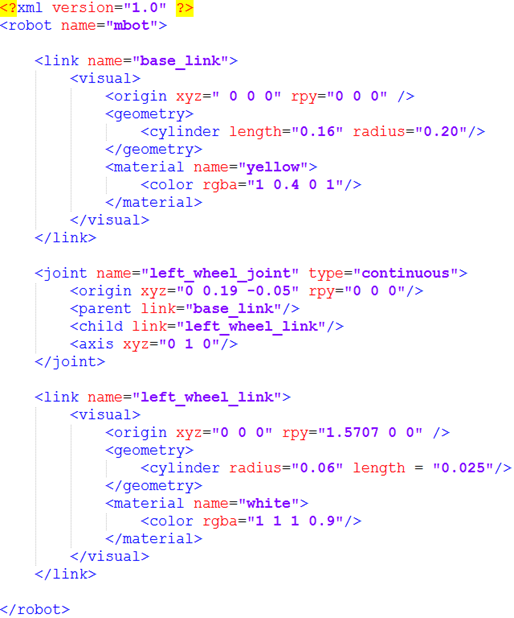
URDF模型文件使用的是XML格式,右側就是一個機器人的URDF描述,乍看上去,有點像網頁開發的源代碼,都是由一系列尖括號包圍的標簽和其中的屬性組合而成。
如何使用這樣一個文件描述機器人呢?比如這個機械臂,大家可以看下自己的手臂,我們的手臂是由大臂和小臂組成,他們獨自是無法運動的,必須通過一個手肘關節連接之后,才能通過肌肉驅動,產生相對運動。
在建模中,大臂和小臂就類似機器人的這些獨立的剛體部分,稱為連桿Link,手肘就類似于機器人電機驅動部分,稱為關節joint。
所以在URDF建模過程中,關鍵任務就是通過這里的和,理清楚每一個連桿和關節的描述信息。
-
機器人
+關注
關注
211文章
28380瀏覽量
206919 -
操作系統
+關注
關注
37文章
6801瀏覽量
123285 -
建模
+關注
關注
1文章
304瀏覽量
60765 -
機器臂
+關注
關注
0文章
18瀏覽量
6307
發布評論請先 登錄
相關推薦





 工商網監
工商網監
評論