 如何創建機器人模型
如何創建機器人模型
完整機器人模型
所有的link和joint標簽完成了對機器人每個部分的描述和組合,全都放在一個robot標簽中,就形成了完整的機器人模型。
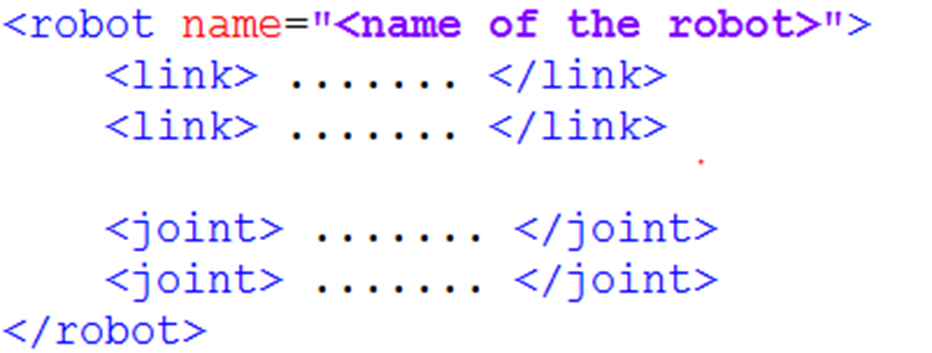
所以大家在看某一個URDF模型時,先不著急看每一塊代碼的細節,先來找link和joint,看下這個機器人是由哪些部分組成的,了解完全局之后,再看細節。
創建機器人模型
好啦,講了這么多,還是要看一個完整的示例。
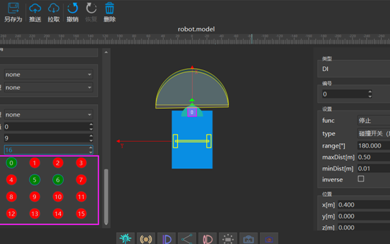
我們以這款移動機器人模型為例,一起看下它的URDF建模過程。
功能包結構
機器人的模型放置在learning_urdf功能包中,功能包中包含的文件夾如下:
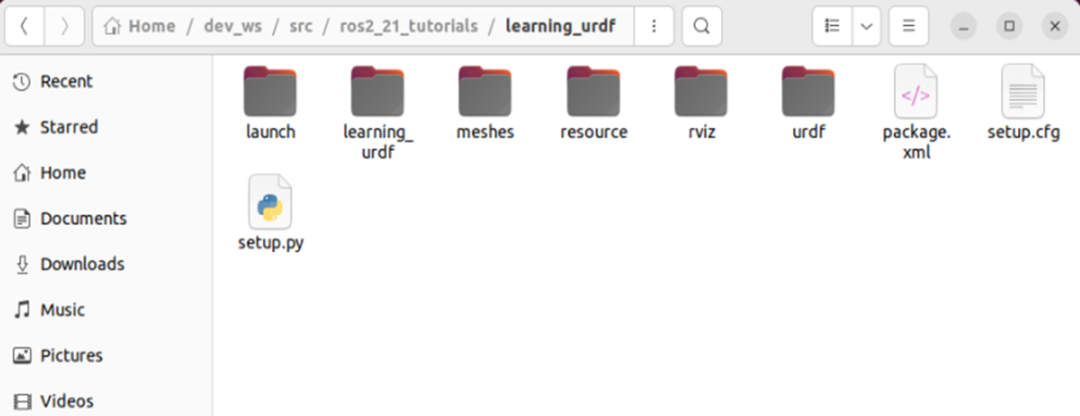
- urdf:存放機器人模型的URDF或xacro文件
- meshes:放置URDF中引用的模型渲染文件
- launch:保存相關啟動文件
- rviz:保存rviz的配置文件
模型可視化效果
我們先來看下這個模型的效果,嘗試逆向分下一下機器人的結構。
$ ros2 launch learning_urdf display.launch.py
很快就可以看到Rviz中顯示的機器人模型啦,大家可以使用鼠標拖拽觀察。
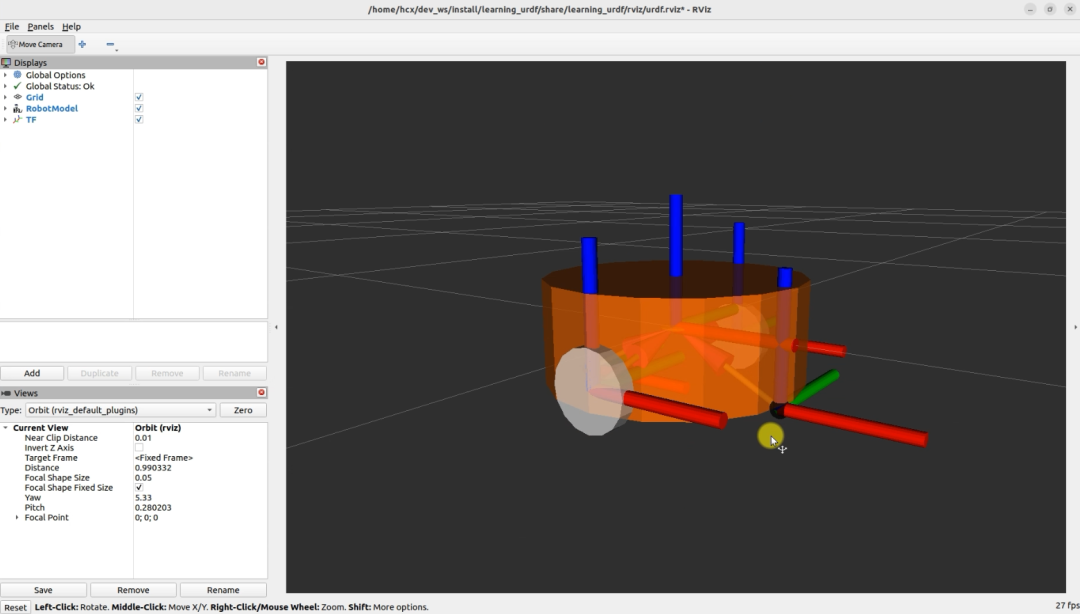
從可視化的效果來看,這個機器人由五個link和4個joint組成。
查看URDF模型結構
我們分析的對不對呢,可以在模型文件的路徑下,使用urdf_to_graphviz這個小工具來分析下。
$ urdf_to_graphviz mbot_base.urdf # 在模型文件夾下運行
運行成功后會產生一個pdf文件,打開之后就可以看到URDF模型分析的結果啦,是不是和我們的猜測完全相同呢!
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28524瀏覽量
207550 -
模型
+關注
關注
1文章
3268瀏覽量
48926 -
機器臂
+關注
關注
0文章
18瀏覽量
6321
發布評論請先 登錄
相關推薦
Al大模型機器人
金航標kinghelm薩科微slkor總經理宋仕強介紹說,薩科微Al大模型機器人有哪些的優勢?薩科微AI大模型機器人由清華大學畢業的天才少年N博士和王博士團隊開發,與同行相比具有許多優
發表于 07-05 08:52
【「具身智能機器人系統」閱讀體驗】2.具身智能機器人大模型
近年來,人工智能領域的大模型技術在多個方向上取得了突破性的進展,特別是在機器人控制領域展現出了巨大的潛力。在“具身智能機器人大模型”部分,作者研究并探討了大
發表于 12-29 23:04
機器人餐廳
哈爾濱首開機器人餐廳 生意爆棚2013年1月12日,哈爾濱市中央大街上有一家機器人為主題的餐廳。據了解,這家機器人主題餐廳營業半年來,顧客盈門,很受食客的歡迎。餐廳有煮水餃機器人、煮面
發表于 07-26 09:11
機器人視覺——機器人的“眼睛”
目前產業機器人僅能在嚴格定義的結構化環境中執行預定指令動作,缺乏對環境的感知與應變能力,這極大地限制了機器人的應用。利用機器人的視覺控制,不需要預先對產業機器人的運動軌跡進行示教或離
發表于 01-23 15:02
nao機器人與其他機器人的區別
相比于之前的機器人,NAO機器人穿上人類的服裝,那就像是一個真人出現在我們面前似得,NAO機器人的四肢設計的非常的靈活,具有多個自由度的身體,使得NAO機器人能夠靈敏的行走以及參加一
發表于 02-13 15:43
【Aworks申請】家庭服務機器人
申請理由:以開發板為處理器,利用深度傳感器Kinect,實現家庭服務機器人的 物體識別技術、人體識別技術、動態不確定環境下的自定位、地圖創建與導航及人機交互與語音識別技術等基本功能,替代
發表于 07-19 23:33
工業機器人的工作原理
要知道機械臂各關節變量空間和末端操作器的位置和姿態之間的關系,這就是機器人運動學模型。一臺機器人機械臂幾何結構確定后,其運動學模型即可確定,這是機器
發表于 12-15 10:25
請問為什么用matlab仿真機器人末端軌跡,會出現“位置 1 的索引超出數組范圍(不能超過 1)”的問題?
, L3, L4, L5, L6]); %創建機器人模型 robot.name='M-20iA'; %機器人模型名稱 theta=[0 pi
發表于 01-09 11:25
什么是服務機器人
問:什么是服務機器人?答:根據國際機器人聯合會(InternationalFederationofRobotics,IRF)的定義,服務機器人是一種半自主或全自主工作的機器人,它能幫助
發表于 09-17 07:49
將Simulink模型與Lego機器人結合使用
將Simulink模型與Lego機器人結合使用可提供令人愉悅的基于模型的設計體驗支持LEGO MINDSTORMS NXT作為產品標準功能。即使沒有ECRobot NXT,您也可以玩樂高游戲
發表于 12-20 07:15





 工商網監
工商網監
評論