


無人駕駛路徑規(guī)劃
眾所周知,無人駕駛大致可以分為三個(gè)方面的工作:感知,決策及控制。
路徑規(guī)劃是感知和控制之間的決策階段,主要目的是考慮到車輛動(dòng)力學(xué)、機(jī)動(dòng)能力以及相應(yīng)規(guī)則和道路邊界條件下,為車輛提供通往目的地的安全和無碰撞的路徑。
路徑規(guī)劃問題可以分為兩個(gè)方面:
(一)全局路徑規(guī)劃:全局路徑規(guī)劃算法屬于靜態(tài)規(guī)劃算法,根據(jù)已有的地圖信息(SLAM)為基礎(chǔ)進(jìn)行路徑規(guī)劃,尋找一條從起點(diǎn)到目標(biāo)點(diǎn)的最優(yōu)路徑。
通常全局路徑規(guī)劃的實(shí)現(xiàn)包括Dijikstra算法,A*算法,RRT算法等經(jīng)典算法,也包括蟻群算法、遺傳算法等智能算法;
(二)局部路徑規(guī)劃:局部路徑規(guī)劃屬于動(dòng)態(tài)規(guī)劃算法,是無人駕駛汽車根據(jù)自身傳感器感知周圍環(huán)境,規(guī)劃處一條車輛安全行駛所需的路線,常應(yīng)用于超車,避障等情景。通常局部路徑規(guī)劃的實(shí)現(xiàn)包括動(dòng)態(tài)窗口算法(DWA),人工勢(shì)場(chǎng)算法,貝塞爾曲線算法等,也有學(xué)者提出神經(jīng)網(wǎng)絡(luò)等智能算法。
本系列就從無人駕駛路徑規(guī)劃的這兩方面進(jìn)行展開,對(duì)一些經(jīng)典的算法原理進(jìn)行介紹,并根據(jù)個(gè)人的一些理解和想法提出了一些改進(jìn)的意見,通過Matlab2019對(duì)算法進(jìn)行了仿真和驗(yàn)證。過程中如果有錯(cuò)誤的地方,歡迎在評(píng)論區(qū)留言討論,如有侵權(quán)請(qǐng)及時(shí)聯(lián)系。
那么廢話不多說,直接進(jìn)入第一部分的介紹,全局路徑規(guī)劃算法-RRT算法。
全局路徑規(guī)劃 - RRT算法原理
RRT算法,即快速隨機(jī)樹算法(Rapid Random Tree),是LaValle在1998年首次提出的一種高效的路徑規(guī)劃算法。RRT算法以初始的一個(gè)根節(jié)點(diǎn),通過隨機(jī)采樣的方法在空間搜索,然后添加一個(gè)又一個(gè)的葉節(jié)點(diǎn)來不斷擴(kuò)展隨機(jī)樹。
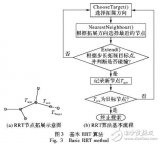
當(dāng)目標(biāo)點(diǎn)進(jìn)入隨機(jī)樹里面后,隨機(jī)樹擴(kuò)展立即停止,此時(shí)能找到一條從起始點(diǎn)到目標(biāo)點(diǎn)的路徑。算法的計(jì)算過程如下:
step1:初始化隨機(jī)樹。將環(huán)境中起點(diǎn)作為隨機(jī)樹搜索的起點(diǎn),此時(shí)樹中只包含一個(gè)節(jié)點(diǎn)即根節(jié)點(diǎn);
stpe2:在環(huán)境中隨機(jī)采樣。在環(huán)境中隨機(jī)產(chǎn)生一個(gè)點(diǎn),若該點(diǎn)不在障礙物范圍內(nèi)則計(jì)算隨機(jī)樹中所有節(jié)點(diǎn)到的歐式距離,并找到距離最近的節(jié)點(diǎn),若在障礙物范圍內(nèi)則重新生成并重復(fù)該過程直至找到;
stpe3:生成新節(jié)點(diǎn)。在和連線方向,由指向固定生長距離生成一個(gè)新的節(jié)點(diǎn),并判斷該節(jié)點(diǎn)是否在障礙物范圍內(nèi),若不在障礙物范圍內(nèi)則將添加到隨機(jī)樹 中,否則的話返回step2重新對(duì)環(huán)境進(jìn)行隨機(jī)采樣;
step4:停止搜索。當(dāng)和目標(biāo)點(diǎn)之間的距離小于設(shè)定的閾值時(shí),則代表隨機(jī)樹已經(jīng)到達(dá)了目標(biāo)點(diǎn),將作為最后一個(gè)路徑節(jié)點(diǎn)加入到隨機(jī)樹中,算法結(jié)束并得到所規(guī)劃的路徑 。
RRT算法由于其隨機(jī)采樣及概率完備性的特點(diǎn),使得其具有如下優(yōu)勢(shì):
(1)不需要對(duì)環(huán)境具體建模,有很強(qiáng)空間搜索能力;
(2)路徑規(guī)劃速度快;
(3)可以很好解決復(fù)雜環(huán)境下的路徑規(guī)劃問題。
但同樣是因?yàn)殡S機(jī)性,RRT算法也存在很多不足的方面:
(1)隨機(jī)性強(qiáng),搜索沒有目標(biāo)性,冗余點(diǎn)多,且每次規(guī)劃產(chǎn)生的路徑都不一樣,均不一是最優(yōu)路徑;
(2)可能出現(xiàn)計(jì)算復(fù)雜、所需的時(shí)間過長、易于陷入死區(qū)的問題;
(3)由于樹的擴(kuò)展是節(jié)點(diǎn)之間相連,使得最終生成的路徑不平滑;
(4)不適合動(dòng)態(tài)環(huán)境,當(dāng)環(huán)境中出現(xiàn)動(dòng)態(tài)障礙物時(shí),RRT算法無法進(jìn)行有效的檢測(cè);
(5)對(duì)于狹長地形,可能無法規(guī)劃出路徑。
-
RTT
+關(guān)注
關(guān)注
0文章
66瀏覽量
17614 -
路徑規(guī)劃
+關(guān)注
關(guān)注
0文章
78瀏覽量
15460 -
無人駕駛
+關(guān)注
關(guān)注
99文章
4170瀏覽量
123338 -
RRT
+關(guān)注
關(guān)注
0文章
12瀏覽量
1198
發(fā)布評(píng)論請(qǐng)先 登錄
為ROS navigation功能包添加自定義的全局路徑規(guī)劃器(Global Path Planner)
遺傳算法在水下機(jī)器人路徑規(guī)劃中的應(yīng)用
基于插值A(chǔ)算法的路徑規(guī)劃
基于勢(shì)場(chǎng)柵格法的機(jī)器人全局路徑規(guī)劃
基于游戲中NPC路徑規(guī)劃的混合算法
基于路徑跟蹤方法的路徑規(guī)劃算法
雙足機(jī)器人路徑規(guī)劃算法
由人工勢(shì)場(chǎng)引導(dǎo)RRT進(jìn)行路徑規(guī)劃的方法

一文解讀無人駕駛全局路徑規(guī)劃 - RRT算法原理
自動(dòng)駕駛軌跡規(guī)劃之路徑規(guī)劃總結(jié)

自動(dòng)駕駛 RRT算法原理解析

機(jī)器人路徑基于采樣的規(guī)劃
多臺(tái)倉儲(chǔ)AGV協(xié)作全局路徑規(guī)劃算法的研究

AGV小車中的動(dòng)態(tài)路徑規(guī)劃算法揭秘






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論