 機器人多節點話題通信模型介紹
機器人多節點話題通信模型介紹
節點實現了機器人各種各樣的功能,但這些功能并不是獨立的,之間會有千絲萬縷的聯系,其中最重要的一種聯系方式就是話題,它是節點間傳遞數據的橋梁。
通信模型
以兩個機器人節點為例。A節點的功能是驅動相機這個硬件設備,獲取得到相機拍攝的圖像信息,B節點的功能是視頻監控,將相機拍攝到的圖像實時顯示給用戶查看。
大家可以想一下,這兩個節點是不是必然存在某種關系?沒錯,節點A要將獲取的圖像數據傳輸給節點B,有了數據,節點B才能做這樣可視化的渲染。
此時從節點A到節點B傳遞圖像數據的方式,在ROS中,我們就稱之為話題,它作為一個橋梁,實現了節點之間某一個方向上的數據傳輸。
發布/訂閱模型
從話題本身的實現角度來看,使用了基于DDS的發布/訂閱模型,什么叫發布和訂閱呢?
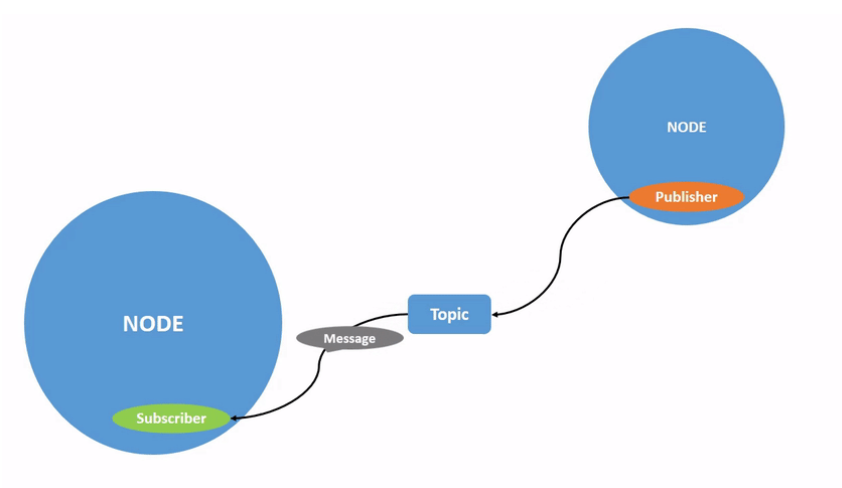
話題數據傳輸的特性是從一個節點到另外一個節點,發送數據的對象稱之為發布者,接收數據的對象稱之為訂閱者,每一個話題都需要有一個名字,傳輸的數據也需要有固定的數據類型。

打一個比方,大家平時應該也會看微信公眾號,比如有一個公眾號,它的名字叫做“古月居”,這個古月居就是話題名稱,公眾號的發布者是古月居的小編,他會把組織好的機器人知識排版成要求格式的公眾號文章,發布出去,這個文章格式,就是話題的數據類型。
如果大家對這個話題感興趣,就可以訂閱“古月居”,成為訂閱者之后自然就可以收到古月居的公眾號文章,沒有訂閱的話,也就無法收到。
類似這樣的發布/訂閱模型在生活中隨處可見,比如訂閱報紙、訂閱雜志等等。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28501瀏覽量
207484 -
模型
+關注
關注
1文章
3261瀏覽量
48914 -
多節點
+關注
關注
0文章
2瀏覽量
861
發布評論請先 登錄
相關推薦
基于VxWorks實時操作系統的通信模型該怎樣去設計?
多任務實時操作系統VxWorks是什么?與傳統通信機制相比,模塊間通信模型有什么優勢?基于VxWorks實時操作系統的通信模型該怎樣去設計?
發表于 04-26 06:25
移動Agent位置透明通信模型的設計
提出一種高效可靠的移動Agent通信模型――D-C通信模型,結合域名字解析器和移動Agent系統中的Communicator實現移動Agent之間的通信。通過引入一種基于全局的、與位置無關的命名方法
發表于 04-16 08:53
?26次下載
數據網格中基于優化機制的通信模型
針對基于多計算機機群構成的網格的大規模并行計算的需要,對多級分組通信模型的單一機群分組通信進行了研究。探討了在單一機群內的主動節點、被動節點個數和各個計算
發表于 06-25 13:52
?12次下載
基于VxWorks的通信模型設計
本文提出了一種任務間的通信模型,將用于網絡通信的UDP方式引進到任務間的通信中,使通信更加靈活和便于管理,改善了整個系統的性能。
發表于 06-01 10:07
?1039次閱讀

云存儲多節點修復協作編碼
針對云存儲中現有多節點失效修復模型的不足,給出了一種可以對多個系統節點或冗余節點同時修復的多節點協作的精確修復碼,證明了其存在性,并且將此修
發表于 02-27 15:23
?0次下載
什么是通信模型DDS
完成的,它相當于是ROS機器人系統中的神經網絡。 通信模型 DDS的核心是通信,能夠實現通信的模型和軟件框架非常多,這里我們列出常用的四種
機器人通信模型有哪些
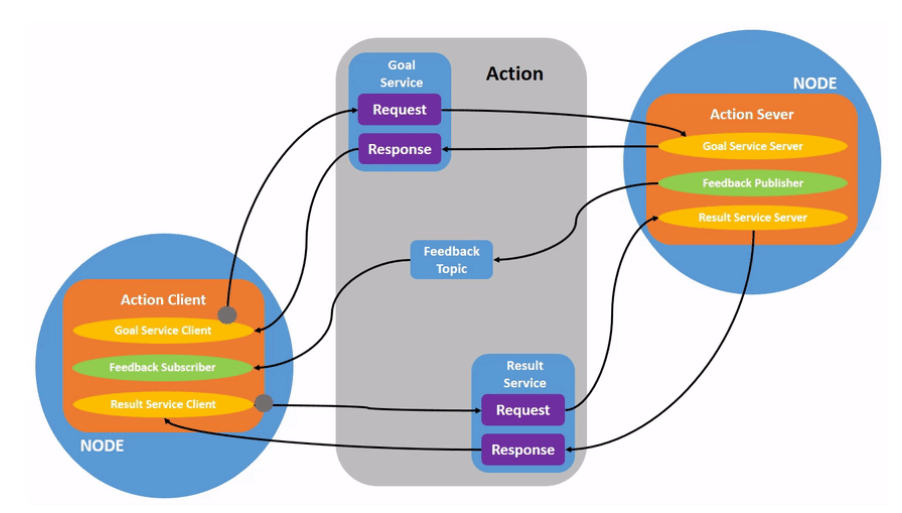
用到——那就是動作。從這個名字上就可以很好理解這個概念的含義,這種通信機制的目的就是便于對機器人某一完整行為的流程進行管理。 通信模型 舉個例子,比如我們想讓機器人轉個圈,這肯定不是一
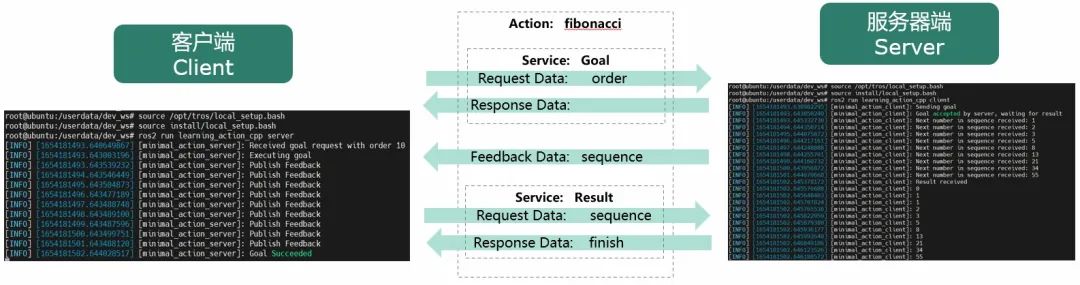
機器人多節點動作通信編程方法
編程方法 相比之前話題和服務的程序,動作通信的例程相對較長,我們一起來運行并分析一下。 運行示例程序 $ source /opt/tros/local_setup.bash $ source
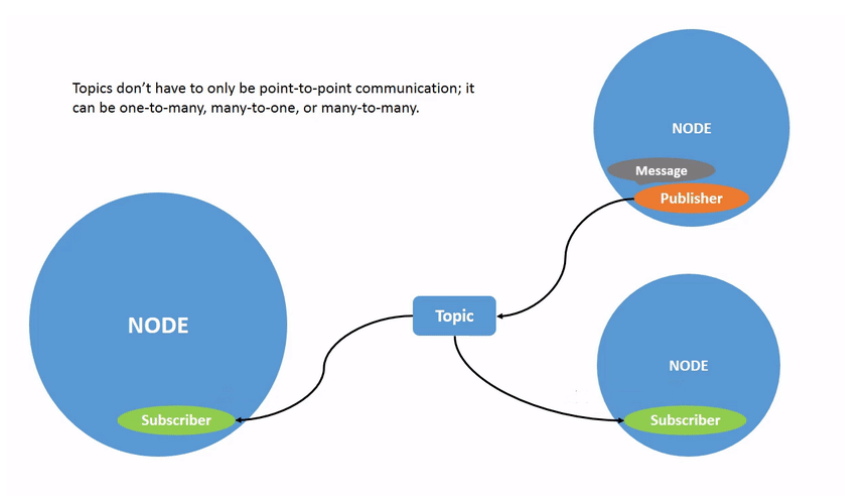
通信模型的多對多通信、異步通信和消息接口是什么
的數量并不是唯一的,可以稱之為是多對多的通信模型。 因為話題是多對多的模型,發布控制指令的搖桿可以有一個,也可以有2個、3個,訂閱控制指令的機器人可以有1個,也可以有2個、3個。 大家
機器人多節點話題通信編程方法
/userdata/dev_ws/ $ colcon build 運行示例程序 編譯成功后,我們嘗試運行話題通信的Hello World例程,在這個例程中,我們會先創建一個發布者,發布話題“chatter”,周期發送“Hell





 工商網監
工商網監
評論