") 機器人多節(jié)點話題通信編程方法
機器人多節(jié)點話題通信編程方法
編程方法
了解了話題的基本原理,接下來我們就要開始編寫代碼啦。
創(chuàng)建工作空間
請大家先按照這個流程創(chuàng)建工作空間、下載課程的例程代碼,并進行編譯。
$ mkdir –p dev_ws/src
$ cd /userdata/dev_ws/src
$ git clone https://gitee.com/guyuehome/togetherros_tutorials.git
$ cd /userdata/dev_ws/
$ colcon build
運行示例程序
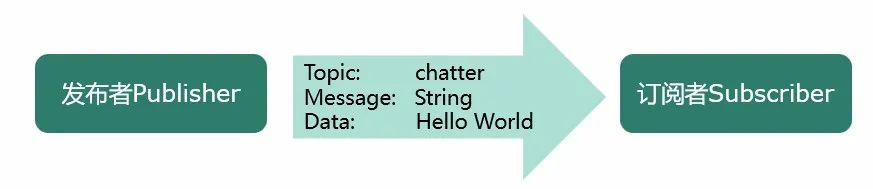
編譯成功后,我們嘗試運行話題通信的Hello World例程,在這個例程中,我們會先創(chuàng)建一個發(fā)布者,發(fā)布話題“chatter”,周期發(fā)送“Hello World”這個字符串,消息類型是ROS中標準定義的String,再創(chuàng)建一個訂閱者,訂閱“chatter”這個話題,從而接收到“Hello World”這個字符串。
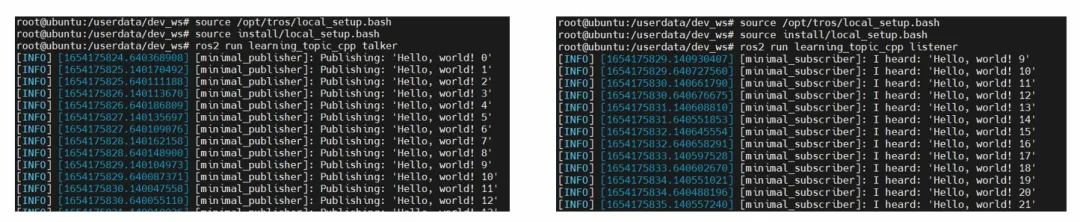
$ source /opt/tros/local_setup.bash
$ source install/local_setup.bash
$ ros2 run learning_topic_cpp talker
$ ros2 run learning_topic_cpp listener
這就是TogetherROS系統中話題通信的方法,依然沿用了ROS2中話題通信的完整流程。
代碼解析
發(fā)布者的實現方法
publisher_member_function.cpp:
#include < chrono >
#include < functional >
#include < memory >
#include < string >
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using namespace std::chrono_literals;
/* This example creates a subclass of Node and uses std::bind() to register a
* member function as a callback from the timer. */
class MinimalPublisher : public rclcpp::Node
{
public:
MinimalPublisher()
: Node("minimal_publisher"), count_(0)
{
publisher_ = this- >create_publisher< std_msgs::msg::String >("topic", 10);
timer_ = this- >create_wall_timer(
500ms, std::bind(&MinimalPublisher::timer_callback, this));
}
private:
void timer_callback()
{
auto message = std_msgs::msg::String();
message.data = "Hello, world! " + std::to_string(count_++);
RCLCPP_INFO(this- >get_logger(), "Publishing: '%s'", message.data.c_str());
publisher_- >publish(message);
}
rclcpp::TimerBase::SharedPtr timer_;
rclcpp::Publisher< std_msgs::msg::String >::SharedPtr publisher_;
size_t count_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared< MinimalPublisher >());
rclcpp::shutdown();
return 0;
}
訂閱者的實現方法
subscriber_member_function.cpp:
#include < memory >
#include "rclcpp/rclcpp.hpp"
#include "std_msgs/msg/string.hpp"
using std::placeholders::_1;
class MinimalSubscriber : public rclcpp::Node
{
public:
MinimalSubscriber()
: Node("minimal_subscriber")
{
subscription_ = this- >create_subscription< std_msgs::msg::String >(
"topic", 10, std::bind(&MinimalSubscriber::topic_callback, this, _1));
}
private:
void topic_callback(const std_msgs::msg::String::SharedPtr msg) const
{
RCLCPP_INFO(this- >get_logger(), "I heard: '%s'", msg- >data.c_str());
}
rclcpp::Subscription< std_msgs::msg::String >::SharedPtr subscription_;
};
int main(int argc, char * argv[])
{
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared< MinimalSubscriber >());
rclcpp::shutdown();
return 0;
}
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28405瀏覽量
207011 -
編程
+關注
關注
88文章
3615瀏覽量
93710 -
程序
+關注
關注
117文章
3786瀏覽量
81022
發(fā)布評論請先 登錄
相關推薦
機器人與編程的區(qū)別
在前一篇文章中講了機器人與編程的區(qū)別,但總感覺講的比較空泛,這篇文章繼續(xù)講講那些區(qū)別。計算機編程和機器人編程最大的區(qū)別就是一個是控制虛擬的,
發(fā)表于 09-01 07:12
Motoman機器人離線編程
歡迎關注Jungle的Motoman機器人離線編程專欄系列文章:Motoman機器人離線編程——Motocom32開發(fā)簡介Motoman機器人
發(fā)表于 09-07 07:33
多節(jié)點大容量FPGA系統的遠程升級方法
多節(jié)點大容量FPGA系統的遠程升級方法:針對目前廣泛使用的以大容量FPGA 實現主要功能的多節(jié)點系統的遠程升級問題,提出了一種基于ATmega64 單片機和RS485 總線以及接入以太網的主控
發(fā)表于 11-20 17:42
?17次下載
多節(jié)點大容量FPGA系統的遠程升級方法
多節(jié)點大容量FPGA系統的遠程升級方法
針對目前廣泛使用的以大容量FPGA實現主要功能的多節(jié)點系統的遠程升級問題,提出了一種基于ATmega64單片機和RS485總
發(fā)表于 03-29 15:09
?820次閱讀
常用的機器人編程方法有哪些
機器人編程【robotprogramming】為使機器人完成某種任務而設置的動作順序描述。機器人運動和作業(yè)的指令都是由程序進行控制,常見的編制方法
發(fā)表于 08-15 17:41
?1.6w次閱讀
焊接機器人編程方法及流程技巧
焊接機器人編程方法有什么?所謂焊接機器人是從事焊接的工業(yè)機器人,廣泛應用于汽車制造、造船、航空等領域。使用
焊接機器人多少錢一臺?
焊接機器人多少錢一臺?根據機器人本體的型號、臂長和焊機型號的不同價格也不盡相同,市面上的焊接機器人價格范圍在3-20萬不等。

焊接機器人編程方法及流程技巧
焊接機器人編程方法有什么?所謂焊接機器人是從事焊接的工業(yè)機器人,廣泛應用于汽車制造、造船、航空等領域。使用
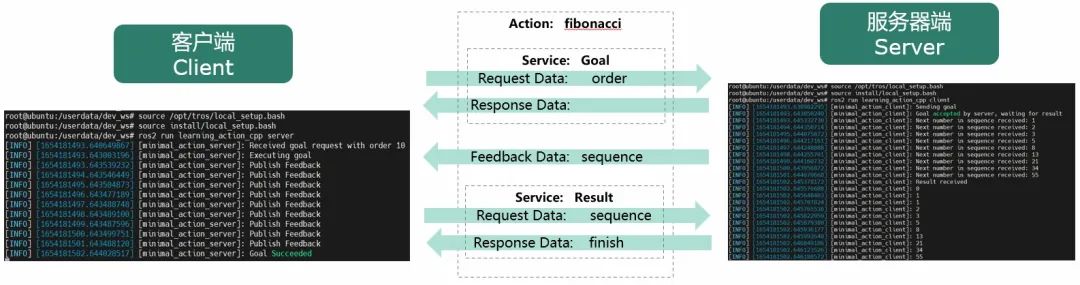
機器人多節(jié)點動作通信編程方法
編程方法 相比之前話題和服務的程序,動作通信的例程相對較長,我們一起來運行并分析一下。 運行示例程序 $ source /opt/tros/local_setup.bash $ sou
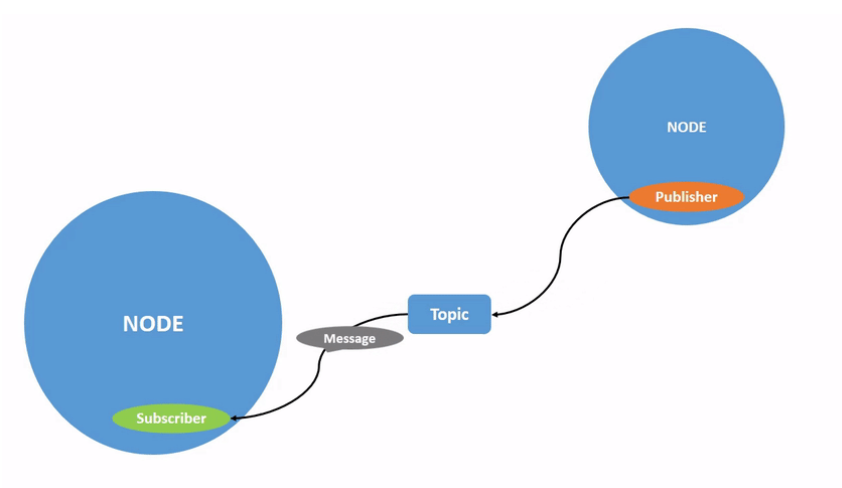
機器人多節(jié)點話題通信模型介紹
節(jié)點實現了機器人各種各樣的功能,但這些功能并不是獨立的,之間會有千絲萬縷的聯系,其中最重要的一種聯系方式就是話題,它是節(jié)點間傳遞數據的橋梁。 通信





 工商網監(jiān)
工商網監(jiān)
評論