") 工字電感分布認(rèn)知 雙水平電感排布方案
工字電感分布認(rèn)知 雙水平電感排布方案
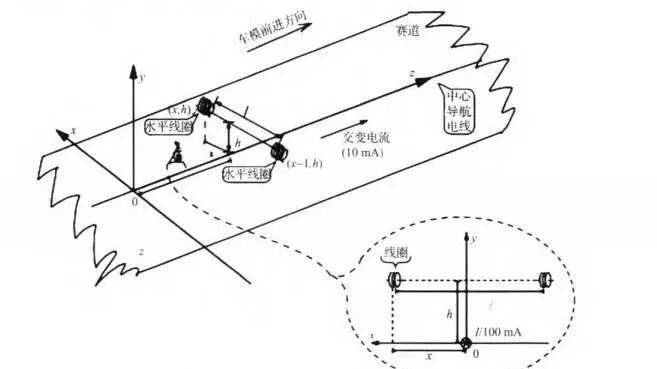
感應(yīng)賽道交變磁場,產(chǎn)生感應(yīng)電動(dòng)勢,后續(xù)電路通過對感應(yīng)電動(dòng)勢進(jìn)行一些列的選頻、放大、檢波,得到穩(wěn)定信號(hào)并輸入到單片機(jī)對賽道信息進(jìn)行識(shí)別,對電機(jī)發(fā)出加減速、舵機(jī)直行拐彎的指令。
電感是電磁車的眼睛,賽道中漆包線流過的微弱的電流與電感產(chǎn)生電磁感應(yīng),產(chǎn)生的感應(yīng)電流經(jīng)過運(yùn)放放大,最后傳給單片機(jī)的AD采集口,即可獲取賽道信息。
基本的分布認(rèn)知
感水平左右放置,漆包線與電感垂直的時(shí)候產(chǎn)生的感應(yīng)電流最大,在賽道上 從左至右移動(dòng)電感,電感上面感應(yīng)電流應(yīng)該是先逐漸變大,再逐漸變小。
電感安裝時(shí)要注意相鄰兩個(gè)電感切忌安裝過近,至少要有兩厘米的距離,否則會(huì)產(chǎn)生互感現(xiàn)象,具體現(xiàn)象就是過十字的時(shí)候車身會(huì)產(chǎn)生振動(dòng),
雙水平電感排布方案
如上圖,這種雙電感平行排布的方案是電磁車結(jié)合賽道采用的電感排布的最基本的方案,此方案也可以使得電磁車簡單地循跡,但效果并不太理想。
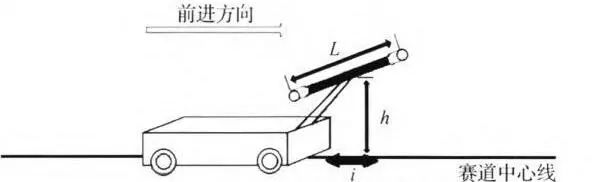
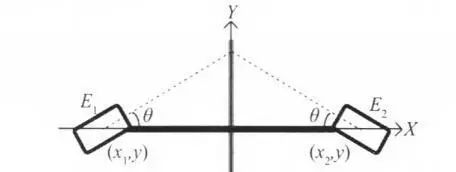
當(dāng)小車如上圖,將水平兩端電感對稱放置時(shí),此時(shí)小車也應(yīng)該處于賽道電磁線中心位置,左右兩邊電感正常情況下應(yīng)相差不大,即差不多相等。
即在直道行駛時(shí)可以保持良好的采集數(shù)據(jù)獲取,通過計(jì)算分析兩端電感數(shù)值,就可以判斷出小車與賽道中心線的偏離方向及偏差量,從而做出相應(yīng)的方向控制。
但雙電感排布也有弊端,如在彎道情況下,不能很好地采集到數(shù)據(jù),沒有辦法精確地計(jì)算出偏差量,只能大致從數(shù)值中推測出小車的偏移方向。
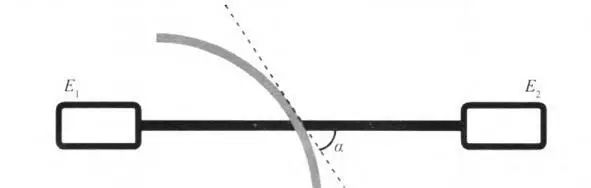
如上圖,水平電感并沒有跟賽道上的電磁線有很好的角度(粗色指賽道電磁線)
嚴(yán)重的會(huì)導(dǎo)致十字直接沖出賽道。
-
電流
+關(guān)注
關(guān)注
40文章
6852瀏覽量
132151 -
電機(jī)
+關(guān)注
關(guān)注
142文章
9014瀏覽量
145431 -
電感
+關(guān)注
關(guān)注
54文章
6136瀏覽量
102319 -
電磁
+關(guān)注
關(guān)注
15文章
1133瀏覽量
51807 -
智能車
+關(guān)注
關(guān)注
21文章
403瀏覽量
76956
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
浙江電感供應(yīng)商,工字電感制造
北京電感生產(chǎn)/定制電感/工字電感
北京工字電感-電感生產(chǎn)-谷景電子
重慶電感供應(yīng)/工字電感怎么選?--谷景電子
北京電感生產(chǎn)-電感優(yōu)勢-插件電感-工字電感
北京定制電感-電感生產(chǎn)-工字電感
北京電感生產(chǎn)-電感優(yōu)勢-工字電感
北京插件電感生產(chǎn)-工字電感-谷景電子
北京電感生產(chǎn)-工字電感-電感優(yōu)勢
工字電感的電流測量和標(biāo)識(shí)方法——工字電感定制Q
蘇州工字電感,工字電感定制,蘇州谷景電子定制電感器G
工字型電感和工字電感的區(qū)別






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論