") 西門子S7-200 SMART PLC位邏輯指令總述
西門子S7-200 SMART PLC位邏輯指令總述
基本指令是PLC最常用的指令,主要包括位邏輯指令、定時(shí)器指令和計(jì)數(shù)器指令
總述:位邏輯指令
在STEP 7-Micro/WIN SMART 軟件的項(xiàng)目指令樹區(qū)域,展開(kāi)“位邏輯”指令包,可以查看所有的位邏輯指令,如圖4-1所示。位邏輯指令有16條,可大致分為觸點(diǎn)指令、線圈指令、立即指令、RS觸發(fā)器指令和空操作指令。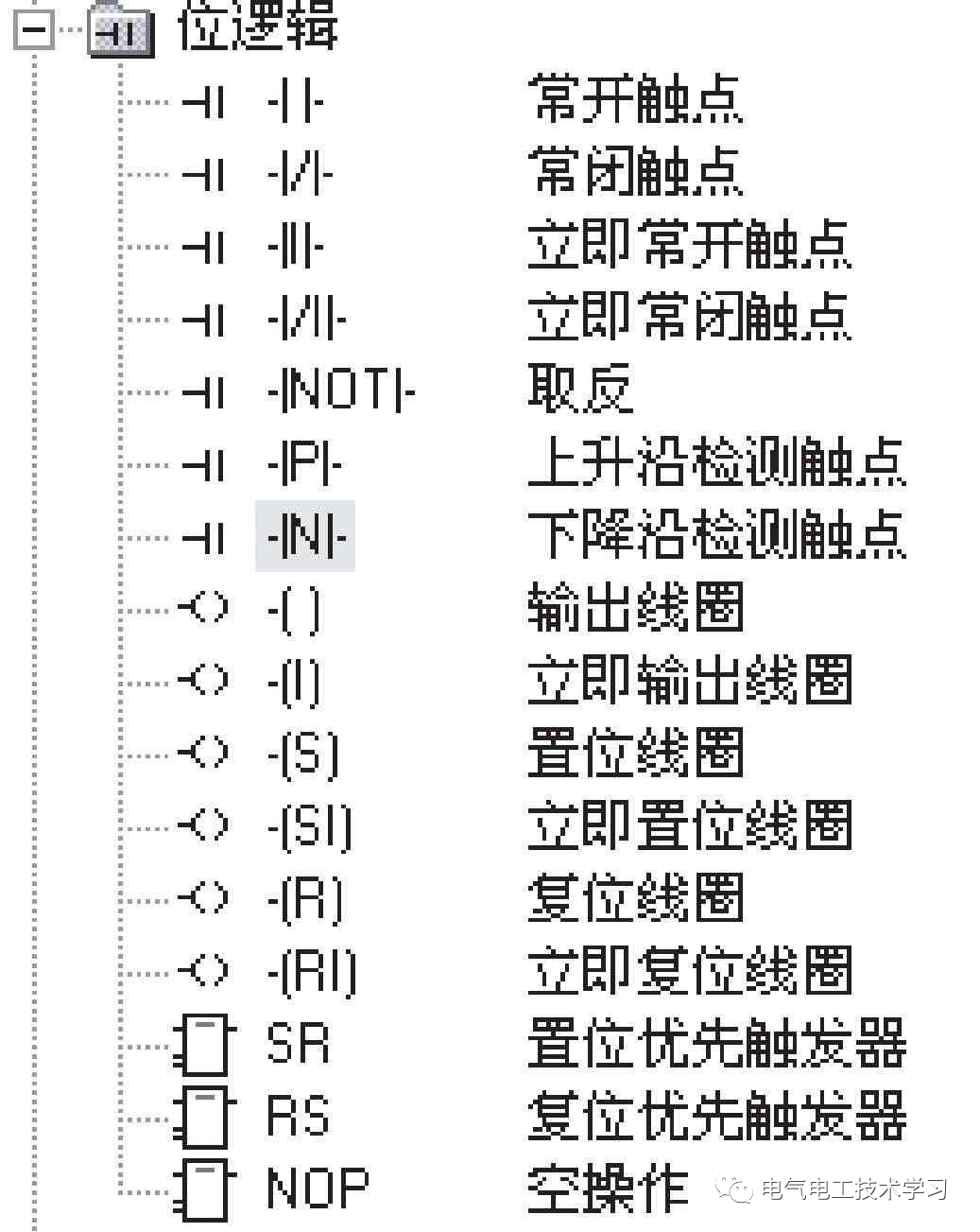
圖4-1 位邏輯指令
一、 觸點(diǎn)指令
觸點(diǎn)指令可分為普通觸點(diǎn)指令和邊沿檢測(cè)觸點(diǎn)指令。
1.普通觸點(diǎn)指令
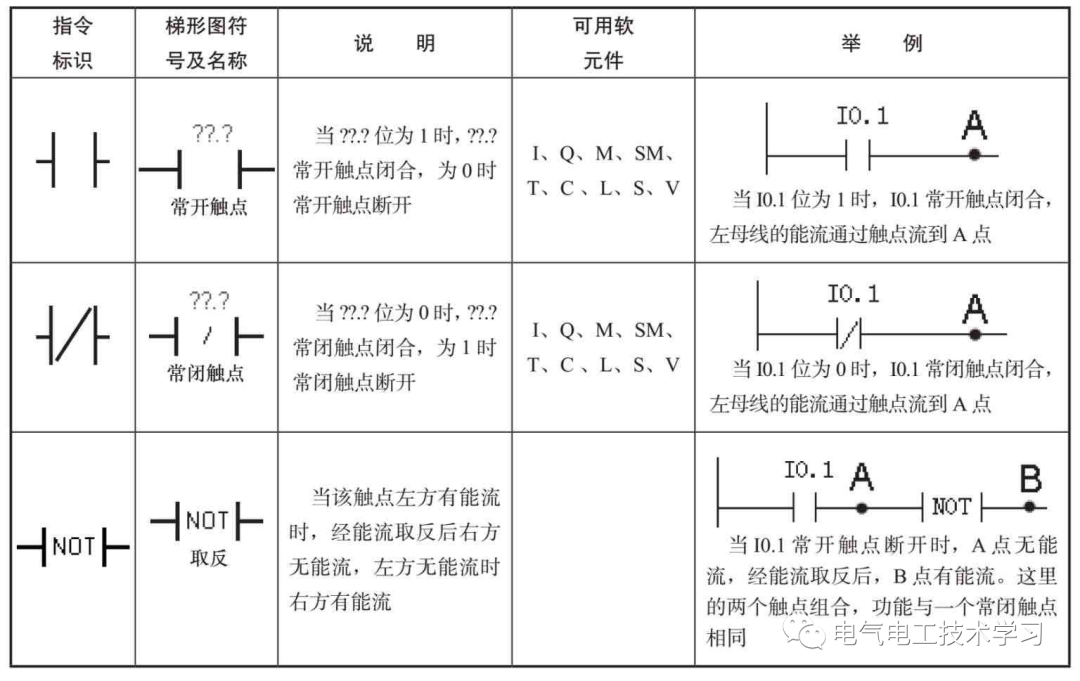
普通觸點(diǎn)指令說(shuō)明如表4-1所示。
表4-1 普通觸點(diǎn)指令說(shuō)明
2.邊沿檢測(cè)觸點(diǎn)指令
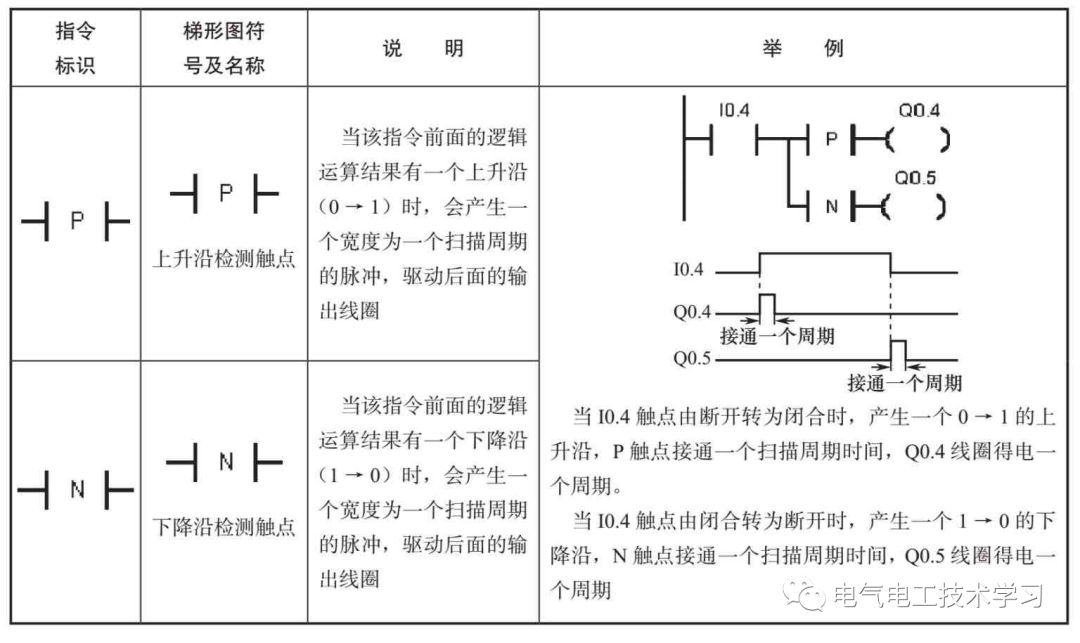
邊沿檢測(cè)觸點(diǎn)指令說(shuō)明如表4-2所示。
表4-2 邊沿檢測(cè)觸點(diǎn)指令說(shuō)明
二、線圈指令
1.指令說(shuō)明
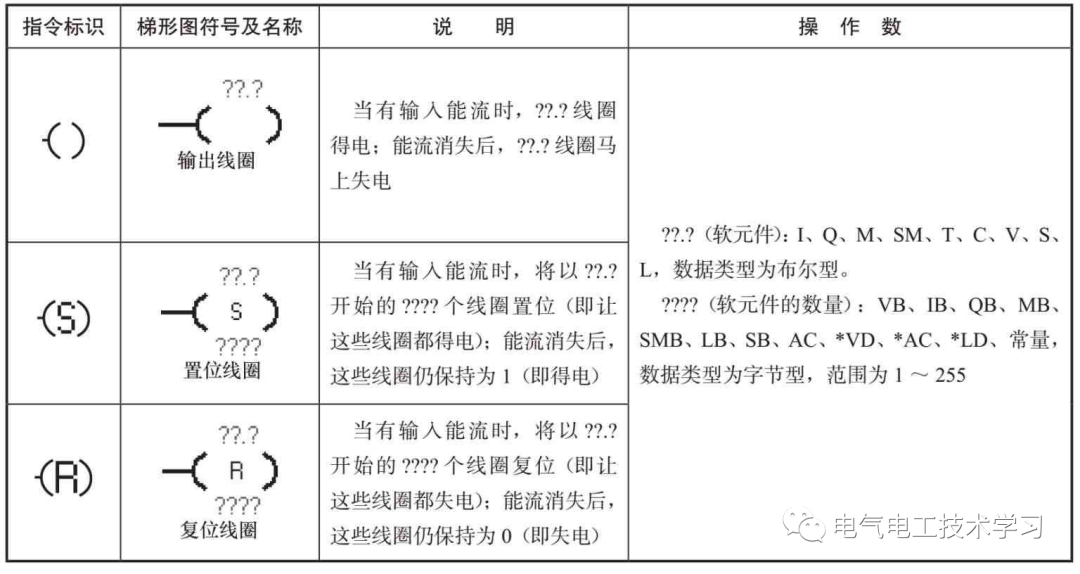
線圈指令說(shuō)明如表4-3所示。
表4-3 線圈指令說(shuō)明
2.指令使用舉例
線圈指令使用如圖4-2所示。當(dāng)I0.4常開(kāi)觸點(diǎn)閉合時(shí),將M0.0~M0.2線圈都置位,即讓這3個(gè)線圈都得電,同時(shí)Q0.4線圈也得電;I0.4常開(kāi)觸點(diǎn)斷開(kāi)后,M0.0~M0.2線圈仍保持得電狀態(tài),而Q0.4線圈則失電。當(dāng)I0.5常開(kāi)觸點(diǎn)閉合時(shí),將M0.0~M0.2線圈都復(fù)位,即這3個(gè)線圈都失電,同時(shí)Q0.5線圈得電;I0.5常開(kāi)觸點(diǎn)斷開(kāi)后,M0.0~M0.2線圈仍保持失電狀態(tài), Q0.5線圈也失電。
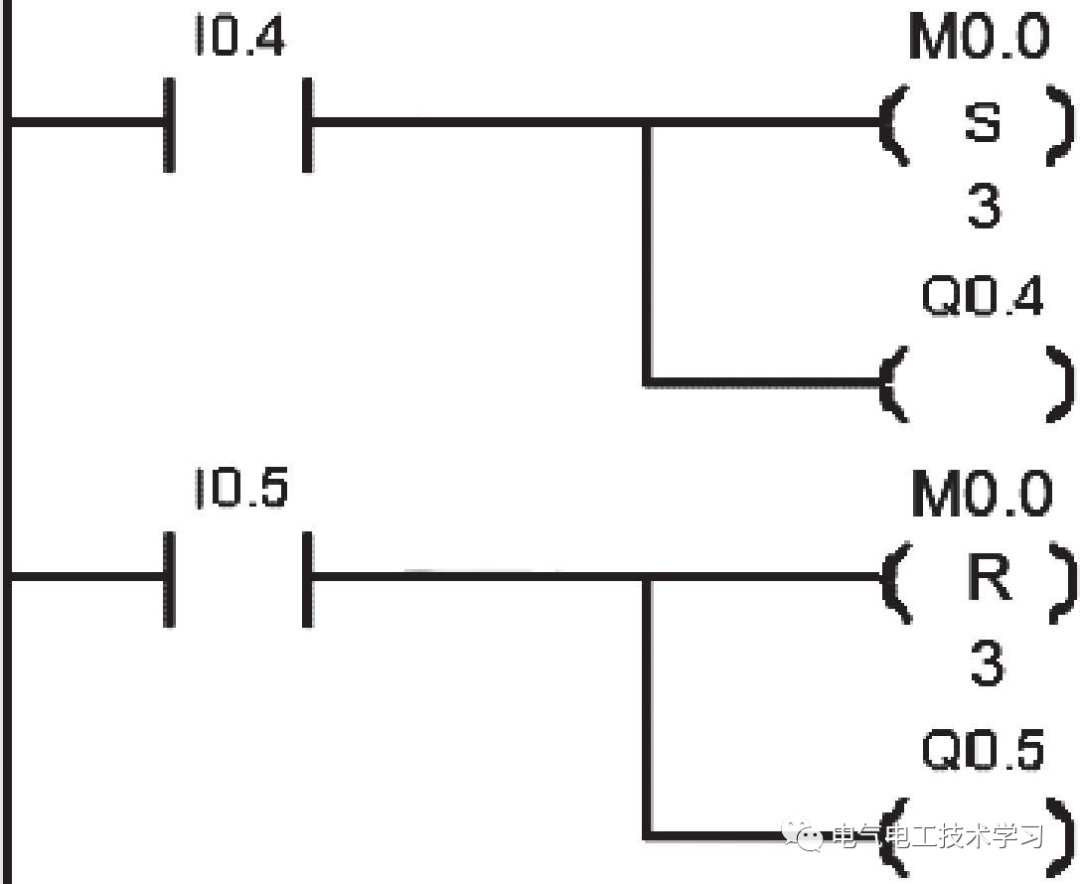
圖4-2 線圈指令使用
三、 立即指令
PLC的一般工作過(guò)程是:當(dāng)操作輸入端設(shè)備時(shí)(如按下I0.0端子外接按鈕),該端端的狀態(tài)數(shù)據(jù)“1”存入輸入映像寄存器I0.0中,PLC運(yùn)行時(shí)先掃描讀出輸入映像寄存器的數(shù)據(jù),然后根據(jù)讀取的數(shù)據(jù)運(yùn)行用戶編寫的程序,程序運(yùn)行結(jié)束后將結(jié)果送入輸出映像寄存器(如Q0.0),通過(guò)輸出電路驅(qū)動(dòng)輸出端子外接的輸出設(shè)備(如接觸器線圈),然后PLC又重復(fù)上述過(guò)程。PLC完整運(yùn)行一個(gè)過(guò)程需要的時(shí)間稱為一個(gè)掃描周期,在PLC執(zhí)行用戶程序階段時(shí),即使輸入設(shè)備狀態(tài)發(fā)生變化(如按鈕由閉合改為斷開(kāi)),PLC也不會(huì)理會(huì)此時(shí)的變化,仍按掃描輸入映像寄存器階段讀取的數(shù)據(jù)執(zhí)行程序,直到下一個(gè)掃描周期才讀取輸入端新?tīng)顟B(tài)。 如果希望PLC工作時(shí)能即時(shí)響應(yīng)輸入或即時(shí)產(chǎn)生輸出,可使用立即指令。立即指令可分為立即觸點(diǎn)指令、立即線圈指令。
1.立即觸點(diǎn)指令
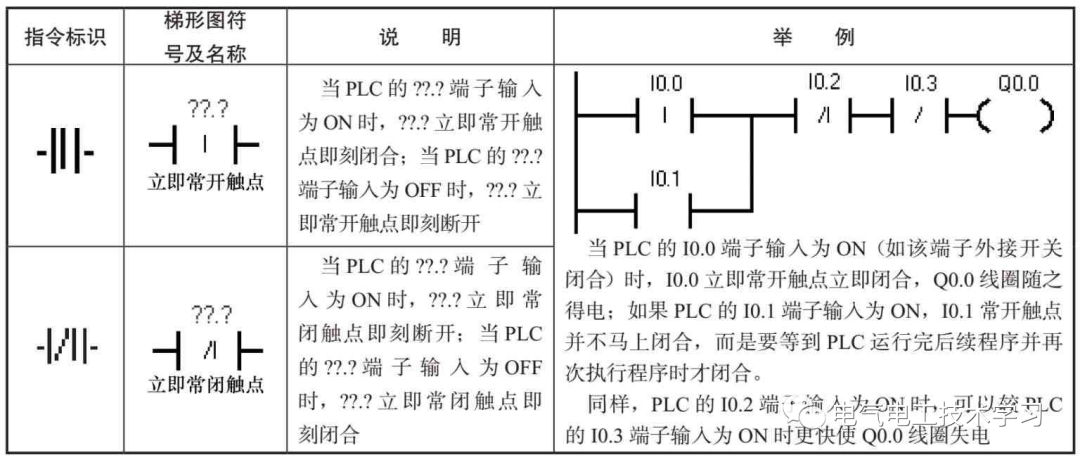
立即觸點(diǎn)指令又稱立即輸入指令,它只適用于輸入量I。執(zhí)行立即觸點(diǎn)指令時(shí),PLC會(huì)立即讀取輸入端子的值,再根據(jù)該值判斷程序中的觸點(diǎn)通/斷狀態(tài),但并不更新該端子對(duì)應(yīng)的輸入映像寄存器的值,其他普通觸點(diǎn)的狀態(tài)仍由掃描輸入映像寄存器階段讀取的值決定。
立即觸點(diǎn)指令說(shuō)明如表4-4所示。
表4-4 立即觸點(diǎn)指令說(shuō)明
2.立即線圈指令
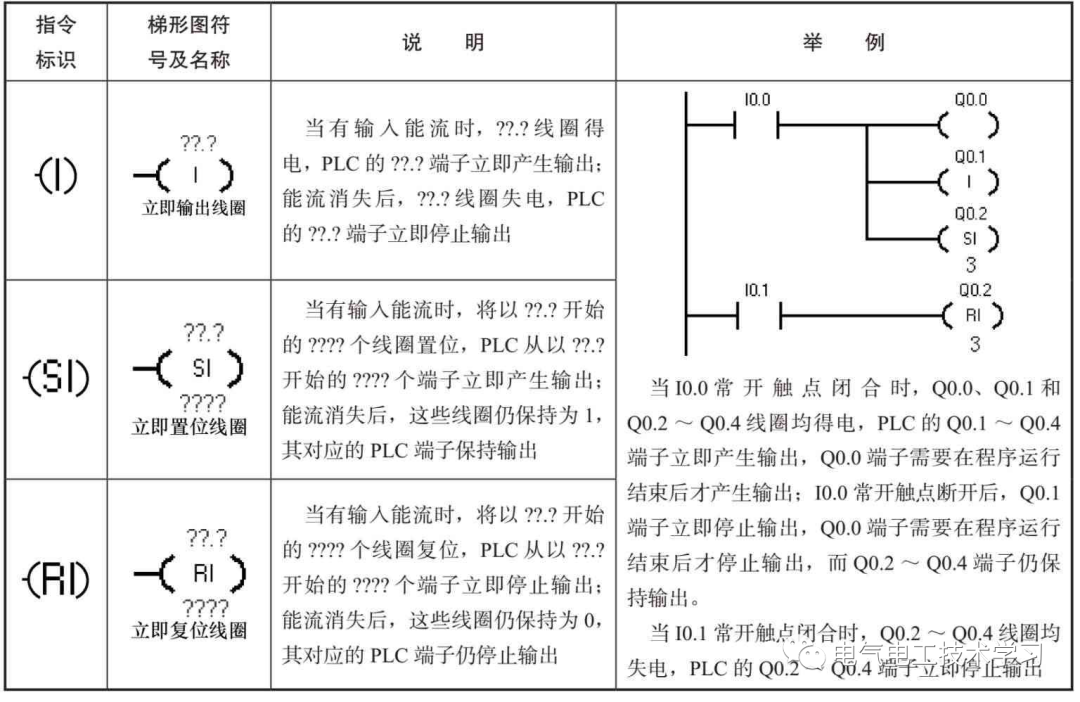
立即線圈指令又稱立即輸出指令,該指令在執(zhí)行時(shí),將前面的運(yùn)算結(jié)果立即送到輸出映像寄存器而即時(shí)從輸出端子產(chǎn)生輸出,輸出映像寄存器內(nèi)容也被刷新。立即線圈指令只能用于輸出量Q,線圈中的“I”表示立即輸出。
立即線圈指令說(shuō)明如表4-5所示。
表4-5 立即線圈指令說(shuō)明
四、 RS觸發(fā)器指令
RS觸發(fā)器指令的功能是根據(jù)R、S端輸入狀態(tài)產(chǎn)生相應(yīng)的輸出,它分為置位優(yōu)先觸發(fā)器指令和復(fù)位優(yōu)先觸發(fā)器指令。
1.指令說(shuō)明
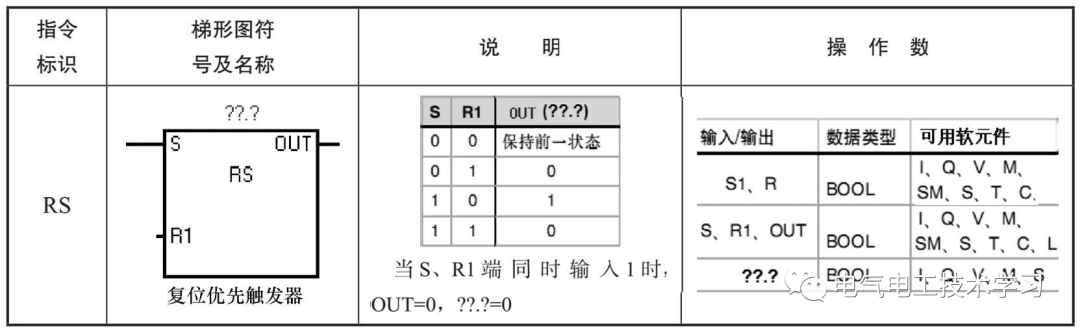
RS觸發(fā)器指令說(shuō)明如表4-6所示。
表4-6 RS觸發(fā)器指令說(shuō)明

2.指令使用舉例
RS觸發(fā)器指令使用如圖4-3所示。 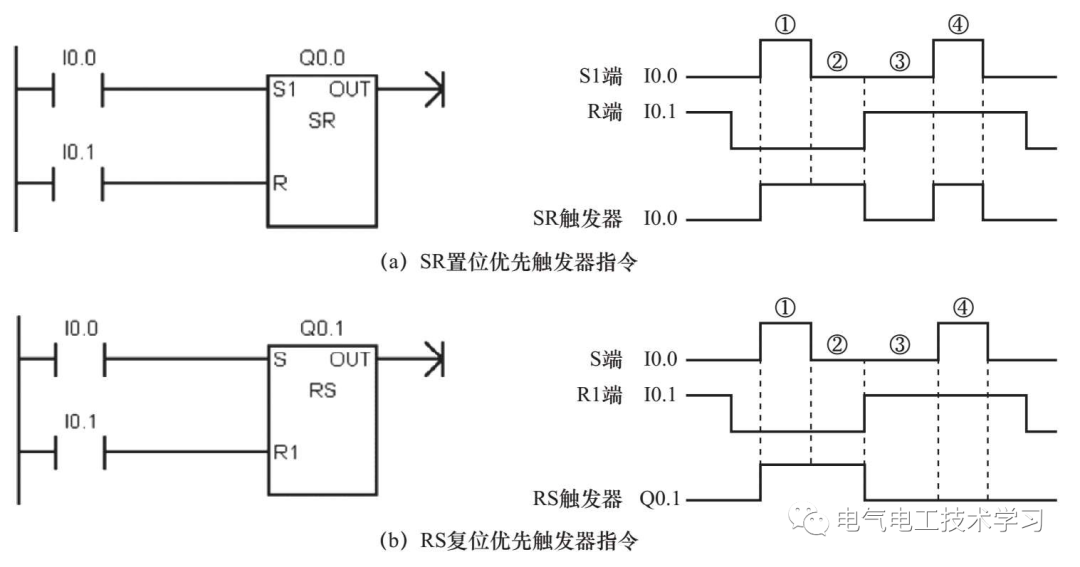
圖4-3 RS觸發(fā)器指令使用
圖4-3(a)使用了SR置位優(yōu)先觸發(fā)器指令,從右方的時(shí)序圖可以看出:
①當(dāng)I0.0觸點(diǎn)閉合(S1=1)、I0.1觸點(diǎn)斷開(kāi)(R=0)時(shí),Q0.0被置位為1;
②當(dāng)I0.0觸點(diǎn)由閉合轉(zhuǎn)為斷開(kāi)(S1=0)、I0.1觸點(diǎn)仍處于斷開(kāi)(R=0)時(shí),Q0.0仍保持為1;
③當(dāng)I0.0觸點(diǎn)斷開(kāi)(S1=0)、I0.1觸點(diǎn)閉合(R=1)時(shí),Q0.0被復(fù)位為0;
④當(dāng)I0.0、I0.1觸點(diǎn)均閉合(S1=0、R=1)時(shí),Q0.0被置位為1。
圖4-3(b)使用了RS復(fù)位優(yōu)先觸發(fā)器指令,其第①~③種輸入、輸出情況與SR置位優(yōu)先觸發(fā)器指令相同,兩者的區(qū)別在于第④種情況。
對(duì)于SR置位優(yōu)先觸發(fā)器指令,當(dāng)S1、R端同時(shí)輸入1時(shí),Q0.0=1;對(duì)于RS復(fù)位優(yōu)先觸發(fā)器指令,當(dāng)S、R1端同時(shí)輸入1時(shí),Q0.0=0。
五、空操作指令
空操作指令的功能是讓程序不執(zhí)行任何操作。由于該指令本身執(zhí)行時(shí)需要一定時(shí)間,故可延緩程序執(zhí)行周期。
空操作指令說(shuō)明如表4-7所示。
表4-7 空操作指令說(shuō)明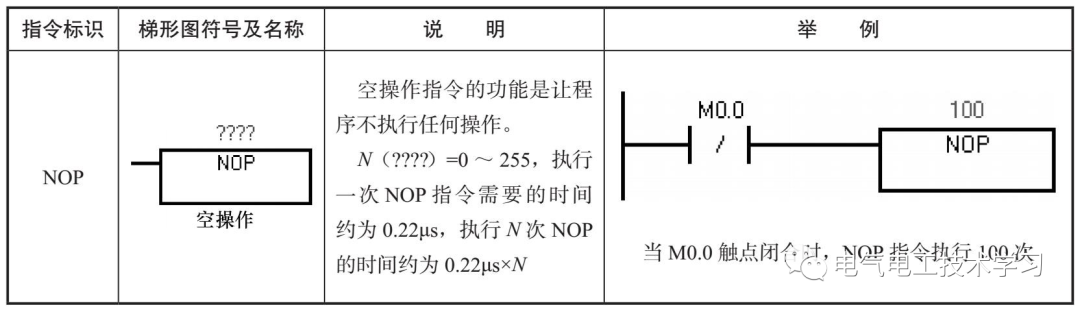
審核編輯:劉清
-
plc
+關(guān)注
關(guān)注
5010文章
13271瀏覽量
463068 -
西門子
+關(guān)注
關(guān)注
94文章
3034瀏覽量
115785 -
計(jì)數(shù)器
+關(guān)注
關(guān)注
32文章
2256瀏覽量
94478 -
定時(shí)器
+關(guān)注
關(guān)注
23文章
3246瀏覽量
114721 -
S7-200
+關(guān)注
關(guān)注
13文章
408瀏覽量
50382
原文標(biāo)題:西門子S7-200 SMART PLC位邏輯指令
文章出處:【微信號(hào):中泰PLC自動(dòng)化教學(xué),微信公眾號(hào):中泰PLC自動(dòng)化教學(xué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
S7-200西門子PLC視頻教程大全
西門子S7-200 PLC應(yīng)用100例

西門子S7-200以太網(wǎng)通訊解決方案

西門子PLC S7-200常見(jiàn)的71個(gè)故障匯總及解決辦法
西門子PLC S7-200smart程序下載錯(cuò)誤分析
西門子S7-200SMART系列PLC的比較和傳送、置位、復(fù)位等指令的使用
西門子PLC S7-200 SMART PID控制功能分享
西門子200PLC指令詳解——位邏輯指令


PLC西門子S7-200smart和S7-1200的區(qū)別?
西門子S7-200 Smart PLC加密設(shè)置全面指南

S7協(xié)議讀取西門子S7-200 Smart PLC數(shù)據(jù)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論