") 利用 NVIDIA Isaac Transport for ROS 提升自定義 ROS 圖形性能
利用 NVIDIA Isaac Transport for ROS 提升自定義 ROS 圖形性能
NVIDIA Isaac Transport for ROS(NITROS)是隨 ROS 2 Humble 加入的兩項(xiàng)硬件加速功能——類型適配和類型協(xié)商。
類型適配使 ROS 節(jié)點(diǎn)能夠使用針對(duì)特定硬件加速器優(yōu)化的數(shù)據(jù)格式進(jìn)行工作。經(jīng)過(guò)適配的類型用于處理圖形,以消除 CPU 和內(nèi)存加速器之間的內(nèi)存拷貝。
通過(guò)類型協(xié)商,處理圖中的不同 ROS 節(jié)點(diǎn)可以公布其支持的類型,ROS 框架也可以選擇數(shù)據(jù)格式,從而實(shí)現(xiàn)理想的性能。
圖 1. NITROS 通過(guò)減少 CPU 和
GPU之間的內(nèi)存拷貝,實(shí)現(xiàn)高效加速
當(dāng)兩個(gè)支持 NITROS 的 ROS 節(jié)點(diǎn)在圖中相鄰時(shí),它們可以通過(guò)類型協(xié)商發(fā)現(xiàn)對(duì)方,然后使用類型適配共享數(shù)據(jù)。通過(guò)消除不必要的內(nèi)存拷貝,類型適配和類型協(xié)商可共同顯著提高基于 ROS 的應(yīng)用中的 AI 和計(jì)算機(jī)視覺(jué)任務(wù)性能。
這不僅減少了 CPU 開(kāi)銷,還優(yōu)化了底層硬件的性能。圖 1 顯示了使用 NITROS 的高效硬件加速。數(shù)據(jù)可以從 GPU 內(nèi)存中訪問(wèn),而不需要頻繁地復(fù)制 CPU。
由于 ROS 框架與不支持協(xié)商的傳統(tǒng)節(jié)點(diǎn)保持兼容,因此可在處理圖中結(jié)合使用基于 NITROS 的 Isaac ROS 節(jié)點(diǎn)和其他 ROS 節(jié)點(diǎn)。支持 NITROS 的節(jié)點(diǎn)在與非 NITROS 節(jié)點(diǎn)通信時(shí),其功能與典型的 ROS 2 節(jié)點(diǎn)相同。大多數(shù) Isaac ROS GEM 都是通過(guò) NITROS 加速的。
請(qǐng)通過(guò)NVIDIA NITROS 文檔進(jìn)一步了解關(guān)于 NITROS 和系統(tǒng)假設(shè)的更多信息:https://nvidia-isaac-ros.github.io/concepts/nitros/index.html
搭載 NITROS 的 NVIDIA CUDA
NVIDIA CUDA是一種并行計(jì)算編程模型,可大幅提高搭載 GPU 的機(jī)器人系統(tǒng)的運(yùn)行速度。自定義 ROS 2 節(jié)點(diǎn)可通過(guò)代管式 NITROS 發(fā)布器和代管式 NITROS 訂閱器,使用搭載 NITROS 的 CUDA。
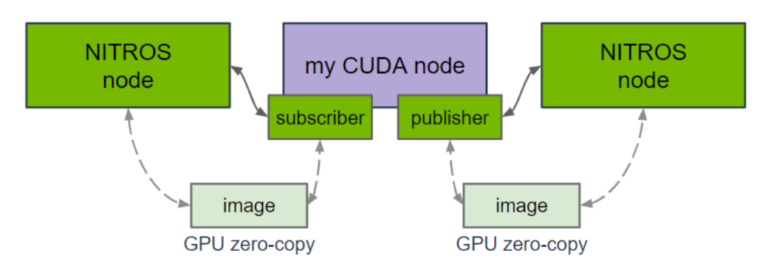
圖 2. 搭載 NITROS 的 CUDA 概覽
ROS 節(jié)點(diǎn)中的 CUDA 代碼可以使用代管式 NITROS 發(fā)布器,并與支持 NITROS 的 Isaac ROS 節(jié)點(diǎn)共享 GPU 內(nèi)存中的輸出緩沖區(qū)。這樣就省去了昂貴的 CPU 內(nèi)存拷貝步驟,從而提高了性能。NITROS 還能通過(guò)發(fā)布與普通 ROS 2 消息相同的數(shù)據(jù),來(lái)保持與非 NITROS 節(jié)點(diǎn)的兼容性。
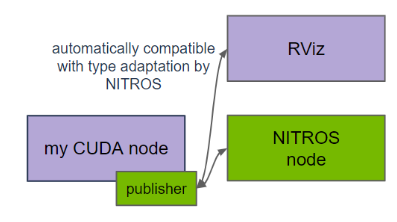
圖 3. ROS 2 節(jié)點(diǎn)中的 NITROS 發(fā)布器
在訂閱器方面,ROS 節(jié)點(diǎn)中的 CUDA 代碼可以使用代管式 NITROS 訂閱器來(lái)接收 GPU 內(nèi)存中的輸入。輸入既可以來(lái)自于支持 NITROS 的 Isaac ROS 節(jié)點(diǎn),也可以來(lái)自于使用 NITROS 發(fā)布器的其他支持 CUDA 的 ROS 節(jié)點(diǎn)。與代管式 NITROS 發(fā)布器一樣,這也能通過(guò)增加 GPU 和 CPU 之間的并行計(jì)算來(lái)提高性能。
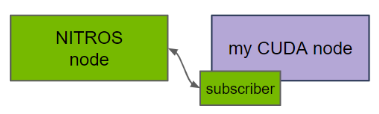
圖 4.ROS 2 節(jié)點(diǎn)中的 NITROS 訂閱器
為了更好地理解這一點(diǎn),讓我們來(lái)看一個(gè)基于 DNN 的點(diǎn)云分割示例圖。總的來(lái)說(shuō),有三個(gè)主要的組件使用搭載 NITROS 的 CUDA:
-
搭載代管式 NITROS 發(fā)布器的編碼器節(jié)點(diǎn):可將 sensor_msgs/PointCloud2 消息轉(zhuǎn)換為 NitrosTensorList
-
Isaac ROS TensorRT 節(jié)點(diǎn):可執(zhí)行 DNN 推理,接收輸入 NitrosTensorList 并生成輸出 NitrosTensorList
-
搭載代管式 NITROS 訂閱器的解碼器節(jié)點(diǎn):可將輸出的 NitrosTensorList 轉(zhuǎn)換為分段的 sensor_msgs/PointCloud2 消息
代管式 NITROS 發(fā)布器和訂閱器提供了一個(gè)可與標(biāo)準(zhǔn)的 rclcpp::Publisher 和 rclcpp::Subscriber API 相媲美的熟悉界面,使與現(xiàn)有 ROS 2 節(jié)點(diǎn)的集成更加直觀。搭載 NITROS 的 CUDA 還能實(shí)現(xiàn)更加模塊化的軟件設(shè)計(jì)。借助代管式 NITROS 發(fā)布器和訂閱器,CUDA 節(jié)點(diǎn)可以在圖中的任何位置與 Isaac ROS 節(jié)點(diǎn)和其他 CUDA 節(jié)點(diǎn)一起使用,從而在每個(gè)節(jié)點(diǎn)上獲得加速計(jì)算的優(yōu)勢(shì)。
再深入一點(diǎn)來(lái)看,NITROS 是基于 NVIDIA 圖執(zhí)行框架(GXF)開(kāi)發(fā)的,它是一個(gè)用于構(gòu)建高性能計(jì)算圖的可擴(kuò)展框架。NITROS 利用 GXF 實(shí)現(xiàn)了高效的 ROS 應(yīng)用圖。通過(guò)搭載 NITROS 的 CUDA,開(kāi)發(fā)者無(wú)需了解使其節(jié)點(diǎn)支持 NITROS 的前提條件——GXF 的底層工作原理。GXF 層已被抽象化,用戶只需進(jìn)行簡(jiǎn)單的調(diào)整就能啟用 NITROS,從而像往常一樣輕松、快速地編寫 ROS 2 節(jié)點(diǎn)。
訪問(wèn)網(wǎng)址進(jìn)一步了解搭載 NITROS 的 CUDA 的核心概念:https://nvidia-isaac-ros.github.io/concepts/nitros/cuda_with_nitros.html#core-concepts
目前,代管式 NITROS 發(fā)布器和訂閱器僅與 Isaac ROS NitrosTensorList 消息類型兼容。請(qǐng)?jiān)L問(wèn)isaac_ros_nitros_type,查看完整的 NITROS 數(shù)據(jù)類型列表:https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_nitros/tree/main/isaac_ros_nitros_type
使用搭載 NITROS 的 CUDA
和 YOLOv8 進(jìn)行對(duì)象檢測(cè)
Isaac ROS 提供了一個(gè)YOLOv8 示例:https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_object_detection/tree/main/isaac_ros_yolov8,展示了如何使用代管式 NITROS 實(shí)用程序和自定義 ROS 解碼器來(lái)充分運(yùn)用 NITROS。該示例使用來(lái)自 Isaac ROS DNN Inference 的軟件包,通過(guò) YOLOv8 來(lái)執(zhí)行 TensorRT 加速的對(duì)象檢測(cè)。代管式 NITROS 發(fā)布器和訂閱器使用 NITROS 類型的消息,目前只與 Isaac ROS NitrosTensorList 消息類型兼容。這種消息類型用于在節(jié)點(diǎn)和 Isaac ROS DNN Inference 節(jié)點(diǎn)之間共享張量。
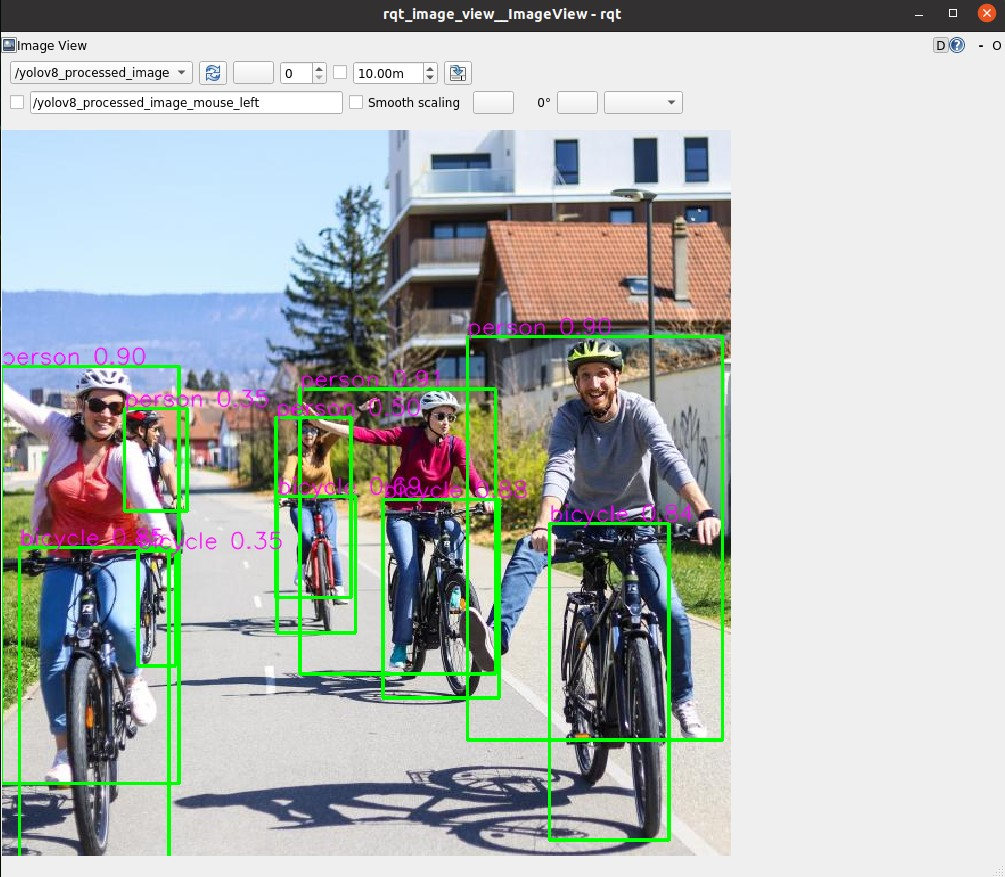
圖 5. 使用 Isaac ROS DNN Inference
檢測(cè) YOLOv8 對(duì)象
假設(shè)您想使用由 Isaac ROS DNN Inference 和 CUDA NITROS 加速的自定義對(duì)象檢測(cè)模型,檢測(cè)流程涉及輸入圖像編碼、DNN 推理以及輸出解碼三個(gè)主要步驟。Isaac ROS DNN Inference 實(shí)現(xiàn)了前兩個(gè)步驟。
在解碼步驟中,必須從推理結(jié)果(即張量)中提取相關(guān)信息。對(duì)于像 2D 物體檢測(cè)這樣的任務(wù),相關(guān)信息包括邊界框以及圖像中每個(gè)檢測(cè)到的輸出的類別得分。
下面讓我們來(lái)詳細(xì)了解各個(gè)步驟。
第 1 步:編碼
在輸入方面,Isaac ROS 提供了一個(gè)由 NITROS 加速的 DNN 圖像編碼器。它會(huì)對(duì)輸入圖像進(jìn)行預(yù)處理,并將其轉(zhuǎn)換為張量,然后通過(guò) isaac_ros_tensor_list 類型將張量傳遞給 TensorRT 或 Triton 節(jié)點(diǎn)進(jìn)行推理。
您可以為各種預(yù)處理功能(如調(diào)整大小等)指定圖像大小和網(wǎng)絡(luò)期望的輸入大小等參數(shù)。請(qǐng)注意,根據(jù)任務(wù)的不同,您需要使用不同的編碼器。例如,由于網(wǎng)絡(luò)期望的輸入編碼不同,您不能在語(yǔ)言模型中使用這種圖像編碼器。
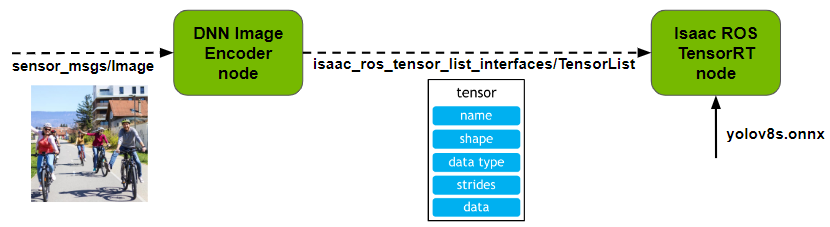
圖 6. Isaac ROS DNN 圖像編碼器節(jié)點(diǎn)概覽
第 2 步:推理
Isaac ROS 為 DNN 推理提供兩個(gè) ROS 節(jié)點(diǎn)——TensorRT 節(jié)點(diǎn)和 Triton 節(jié)點(diǎn)。YOLOv8 樣本目前使用其中的 TensorRT 節(jié)點(diǎn)。將訓(xùn)練好的模型提供給 TensorRT 節(jié)點(diǎn),它就能執(zhí)行推理并輸出包含檢測(cè)結(jié)果的張量。
輸出的張量列表將傳遞給解碼器節(jié)點(diǎn)。您可以指定網(wǎng)絡(luò)所期望的維度和張量名稱等參數(shù),并且可以使用 Netron 等工具在 ONNX 模型中輕松找到這些信息。
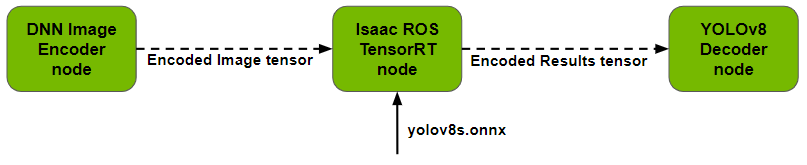
圖 7. Isaac ROS TensorRT 推理節(jié)點(diǎn)概覽
第 3 步:解碼
從 TensorRT 或 Triton 節(jié)點(diǎn)推理出的輸出張量必須解析為所需的邊界框和類信息。比方說(shuō),您把模型的解碼器寫成了 ROS 2 節(jié)點(diǎn)(而且還不支持 NITROS)。
解碼器節(jié)點(diǎn)并不支持 NITROS 類型的信息,而是期望從推理節(jié)點(diǎn)獲得典型的 ROS 2 信息。由于 NITROS 保持了與非 NITROS 節(jié)點(diǎn)的兼容性,因此這種方法仍然有效。
不過(guò)在這種情況下,推理節(jié)點(diǎn)(位于 GPU 內(nèi)存中)輸出的 NITROS 類型消息會(huì)被轉(zhuǎn)換成 ROS 2 消息,并被傳送到 CPU 內(nèi)存中供解碼器使用。這將帶來(lái)一些開(kāi)銷,因?yàn)閿?shù)據(jù)現(xiàn)在位于 CPU 內(nèi)存中,導(dǎo)致在與下游 ROS 節(jié)點(diǎn)協(xié)同工作時(shí)需要復(fù)制 CPU 內(nèi)存。
現(xiàn)在,假設(shè)您想升級(jí)解碼器,以便通過(guò) NITROS 與推理節(jié)點(diǎn)(以及其他 NITROS 加速節(jié)點(diǎn))進(jìn)行通信,而不需要承擔(dān) CPU 內(nèi)存復(fù)制的成本。在這種情況下,所有數(shù)據(jù)都會(huì)保留在 GPU 內(nèi)存中。
在解碼器節(jié)點(diǎn)中使用代管式 NITROS 訂閱器就能輕松實(shí)現(xiàn)這一需求。該訂閱器能夠訂閱來(lái)自推理節(jié)點(diǎn)的 NITROS 類型輸出消息,并使用 NITROS 視圖獲取包含檢測(cè)輸出的 CUDA 緩沖區(qū)。然后,您就可以對(duì)這些數(shù)據(jù)執(zhí)行解碼邏輯,并通過(guò)適當(dāng)?shù)?ROS 消息類型發(fā)布結(jié)果。
YOLOv8 解碼器可設(shè)置 NMS 閾值和置信閾值等參數(shù)以過(guò)濾候選檢測(cè)結(jié)果。可使用一個(gè)簡(jiǎn)單的可視化節(jié)點(diǎn)訂閱產(chǎn)生的 ROS 消息,并在輸入圖像上繪制邊界框。請(qǐng)注意,代管式 NITROS 只能與 CPP ROS 2 節(jié)點(diǎn)集成。
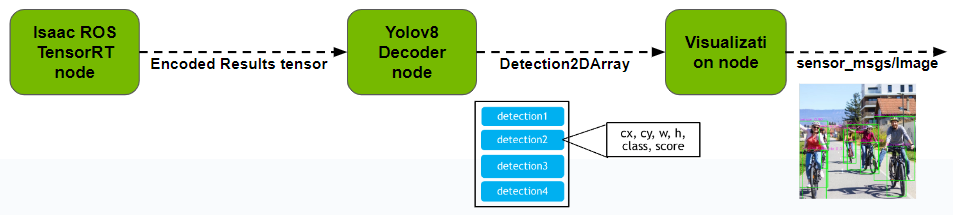
圖 8. YOLOv8 解碼器節(jié)點(diǎn)概覽
Isaac ROS NITROS 橋接器
如果您的機(jī)器人應(yīng)用目前基于 ROS 1,仍可以使用新發(fā)布的 Isaac ROS NITROS 橋接器來(lái)獲得加速計(jì)算的紅利。這對(duì)使用 ROS 2 版本(Humble 之前的版本)的開(kāi)發(fā)者來(lái)說(shuō)也很有幫助,因?yàn)?ROS 2 版本不提供類型適配和協(xié)商功能。
NITROS 橋接器在 ROS 1 Noetic 和 NITROS 軟件包之間傳輸 1080p 圖像的速度比 ROS 1 橋接器快 2.5 倍,充分凸顯了所實(shí)現(xiàn)的提速效果。
ROS 橋接器會(huì)產(chǎn)生基于 CPU 的內(nèi)存復(fù)制成本,而 Isaac ROS NITROS 橋接器通過(guò)將數(shù)據(jù)從 CPU 轉(zhuǎn)移到 GPU 消除了這一成本。這些數(shù)據(jù)可以在 GPU 內(nèi)存中就地使用。
NITROS 橋接器由兩個(gè)轉(zhuǎn)換器節(jié)點(diǎn)組成。一個(gè)用于 ROS(例如 Noetic)一側(cè),另一個(gè)用于 ROS 2(例如 Humble)一側(cè)。在不使用 NITROS 轉(zhuǎn)換器的情況下,使用 ROS 橋接器會(huì)導(dǎo)致圖像從 Noetic 發(fā)送到 Humble,然后再通過(guò) CPU 內(nèi)存中的 ROS 進(jìn)程副本發(fā)送回來(lái),從而增加延遲。這個(gè)問(wèn)題在發(fā)送大量數(shù)據(jù)(如分割點(diǎn)云)的節(jié)點(diǎn)之間尤為明顯。

圖 9. 不使用 NITROS 轉(zhuǎn)換器情況下的 ROS 橋接器
NITROS 橋接器的設(shè)計(jì)目標(biāo)是減少跨 ROS 版本的端到端延遲。請(qǐng)看同一個(gè)例子,這次使用的是 NITROS 轉(zhuǎn)換器。Noetic 一側(cè)的轉(zhuǎn)換器(圖 10)將圖像移至 GPU 內(nèi)存,避免了通過(guò)橋接器復(fù)制 CPU 內(nèi)存。Humble 側(cè)的轉(zhuǎn)換器(圖 10)將 GPU 內(nèi)存中的圖像轉(zhuǎn)換為 NITROS 圖像類型,該類型與其他 NITROS 加速節(jié)點(diǎn)兼容。
反之亦然——圖像數(shù)據(jù)作為 NITROS 圖像通過(guò)兩側(cè)中任何一側(cè)的轉(zhuǎn)換器從 Humble 發(fā)送到位于 Noetic 的 CPU 可訪問(wèn)內(nèi)存中的圖像。
更多關(guān)于性能提升的信息,請(qǐng)?jiān)L問(wèn)NITROS 橋接器:https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/scripts/isaac_ros_nitros_bridge.py和 ros1 橋接器的Isaac ROS 基準(zhǔn):https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_benchmark/index.html。請(qǐng)注意,Isaac ROS NITROS 橋接器尚不支持 NVIDIA Jetson 平臺(tái)。
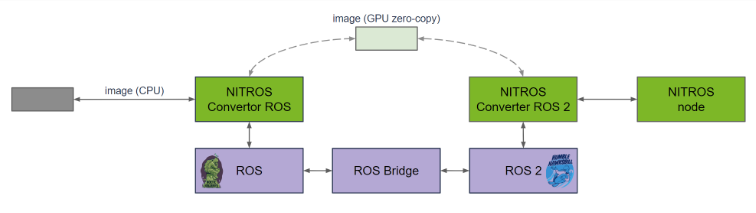
圖 10. NITROS 橋接器概覽
將 ROS 2 節(jié)點(diǎn)與 NITROS 集成的益處
下面總結(jié)了將 ROS 2 節(jié)點(diǎn)與 NITROS 集成的諸多益處:
-
通過(guò)減少 CPU 內(nèi)存拷貝以提高性能。
-
與 RViz 等其他非 NITROS ROS 節(jié)點(diǎn)兼容。
-
通過(guò)代管式 NITROS 發(fā)布器和訂閱器,可輕松將自定義的 ROS 2 節(jié)點(diǎn)與硬件加速的 Isaac ROS 節(jié)點(diǎn)集成。
-
使用搭載 NITROS 的 CUDA 進(jìn)行模塊化軟件設(shè)計(jì)
-
使用 NITROS 橋接器提高基于早期 ROS 版本的應(yīng)用程序的性能。
嘗試使用 Isaac ROS NITROS 和 YOLOv8 對(duì)象檢測(cè)樣本,加速您的 ROS 節(jié)點(diǎn)吧!
訪問(wèn)NVIDIA Isaac ROS 文檔頁(yè)面了解有關(guān)我們硬件加速軟件包的更多信息:https://nvidia-isaac-ros.github.io/index.html
您還可以登陸開(kāi)發(fā)者論壇,了解更多有關(guān) Isaac ROS 的最新信息:https://forums.developer.nvidia.com/c/agx-autonomous-machines/isaac/isaac-ros/600
GTC 2024 將于 2024 年 3 月 18 至 21 日在美國(guó)加州圣何塞會(huì)議中心舉行,線上大會(huì)也將同期開(kāi)放。點(diǎn)擊“閱讀原文”或掃描下方海報(bào)二維碼,立即注冊(cè) GTC 大會(huì)。
原文標(biāo)題:利用 NVIDIA Isaac Transport for ROS 提升自定義 ROS 圖形性能
文章出處:【微信公眾號(hào):NVIDIA英偉達(dá)企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
-
英偉達(dá)
+關(guān)注
關(guān)注
22文章
3771瀏覽量
90995
原文標(biāo)題:利用 NVIDIA Isaac Transport for ROS 提升自定義 ROS 圖形性能
文章出處:【微信號(hào):NVIDIA-Enterprise,微信公眾號(hào):NVIDIA英偉達(dá)企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
開(kāi)放式激光振鏡運(yùn)動(dòng)控制器在Ubuntu+Qt下自定義圖形標(biāo)刻
創(chuàng)建自定義的基于閃存的引導(dǎo)加載程序(BSL)

NVIDIA NeMo加速并簡(jiǎn)化自定義模型開(kāi)發(fā)

NVIDIA AI Foundry 為全球企業(yè)打造自定義 Llama 3.1 生成式 AI 模型

Labview實(shí)現(xiàn)自定義四維云圖(三維曲面圖像)可視化顯示
如何在ROS中調(diào)用.so文件
HarmonyOS開(kāi)發(fā)案例:【 自定義彈窗】
TSMaster 自定義 LIN 調(diào)度表編程指導(dǎo)

HarmonyOS開(kāi)發(fā)實(shí)例:【自定義Emitter】
鴻蒙ArkUI實(shí)例:【自定義組件】
SLAMWARE ROS SDK的基礎(chǔ)架構(gòu)、部署方法和應(yīng)用示例介紹

系統(tǒng)鏡像Ubuntu_ROS2中ROS2是什么意思,帶有ROS2開(kāi)發(fā)環(huán)境嗎?
ros怎么設(shè)置環(huán)境變量
使用 NVIDIA Isaac 仿真并定位 Husky 機(jī)器人

博途用戶自定義庫(kù)的使用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論