 基于PMSM模型的電動汽車動力系統仿真方案簡介
基于PMSM模型的電動汽車動力系統仿真方案簡介
1、簡介
永磁同步電機(Permanent Magnet Synchronous Motor),簡稱PMSM,是指一種轉子用永久磁鐵代替繞線的同步馬達。
PMSM以永磁體提供勵磁,使電動機結構較為簡單,降低了加工和裝配費用,省去了集電環和電刷,大大提高了電動機運行的可靠性;又因無需勵磁電流,沒有勵磁損耗,提高了電動機的效率和功率密度。
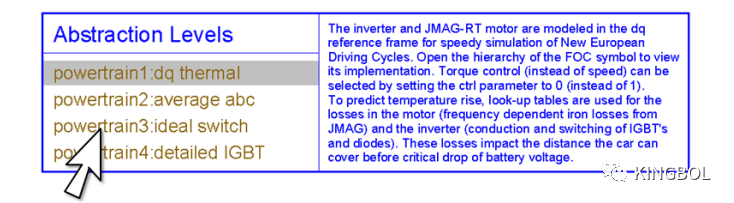
目前國產的電動車都是基本上使用永磁同步電機提供動力,使用SaberRD軟件可以完美實現電動汽車動力系統的仿真。本文從4個層次抽象了電動汽車動力系統。
仿真目標包括全局效率、長時間驅動的熱分析、納秒級的逆變器開關特性及損耗仿真。通過仿真可以優化電機和變頻器控制參數,驗證電能質量(THD和損失),并模擬故障。
四層抽象級別主要包括:
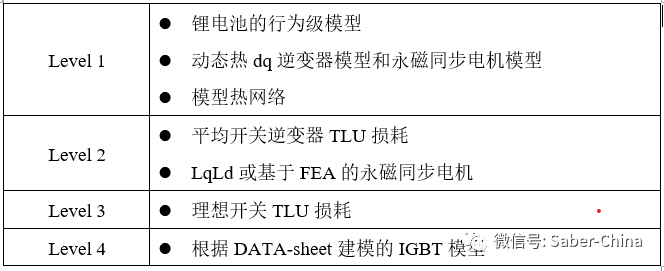
本文中涉及的所有器件特性是基于已公布的數據(詳見表1)。
表1汽車動力系統參數

動力系統的設計核心是永磁同步電機模型,該模型參數包含空間諧波、磁飽和以及頻率相關損耗。(見下圖1)

圖1 電機參數
2、Level 1

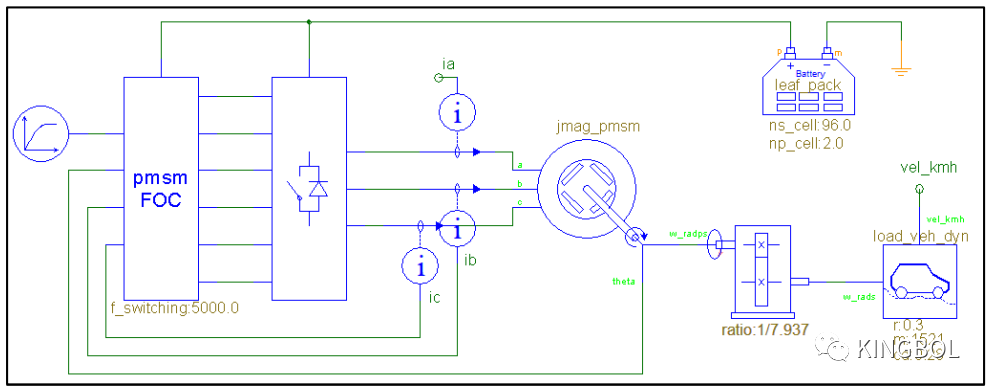
圖2 汽車電機驅動系統仿真電路(Level 1)
層1抽象的電路仿真速度最快,用來仿真長時間運行的項目。在下圖3中, 60s的仿真時間內可以完成實際運行時間為7小時(直到電池耗盡)的運行結果。電機和逆變器使用dq模型以達到最快的仿真速度。
dq模型(基于頻域的)參數獲取是通過使用平均技術分析電壓的高頻開關特性和電流的正弦性得到的基于相位和幅值的數據。這一層次的抽象,非常適用于仿真長期工作的熱分析。
影響汽車多次充放電后的續航距離的因素是是逆變器和電機的損耗,而這個損耗可以準確地通過查找表獲取。這些表格信息可以從IGBT模型或電機的FEA測試結果中獲取。
電機和逆變器的損耗是頻率相關的(逆變器開關頻率和電機轉動頻率)。為了確保足夠的電熱耦合,逆變器損耗也和溫度相關。這里電機模型中沒有添加溫度相關參數。
可以將逆變器和電機產生的熱流連接到一個20℃的簡易熱網絡。圖3表示在周期持續驅動模式下實際速度,溫度和電池電壓波形。NEDC仿真最終能運行的距離為245km ,而廠商報告距離為200km。導致這一現象的原因是因為仿真模型中是100%理想的,沒有損耗。(EDC的全稱為:New European Driving Cycle,中文意思為“新歐洲駕駛循環周期”。我國使用的工信部續航里程標準就是歐洲標準。NEDC的續航里程測試主要模擬環境有市區和郊區,占比分別為4:1。因為實際路況環境影響因素較多,NEDC的測試基本為臺架試驗。)
通過設置瞬態仿真可以獲得電機和逆變器的瞬態效率,并且繪制波形。信號名稱plotting the signals instant_efficiency in vsi_dqx.vsi and jmag_pmsm_dqx pmsm:fea_pmsm_dqx.pmsm。逆變器的平均效率為79%,電機的效率為85%。


圖 3 仿真結果
3、Level 2
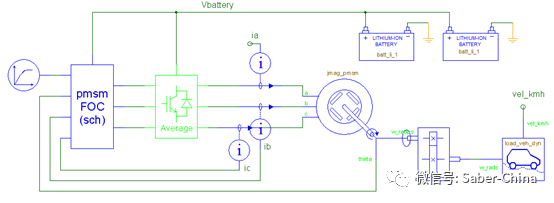
圖4 汽車電機驅動系統仿真電路(Level 2)
層2電路,該層將層1的基于直流的dq坐標軸改為abc坐標軸,使用了非開關3相逆變器,產生同步正弦電壓。Level 2電路仿真時間會變慢。因為周期性的正弦信號沒有被抽象掉。但是電壓是非連續的,要比脈寬是調制的Level 3電路快。Level 2電路是速度和精度之間的折衷,適合研究電機驅動電路。特別是可以觀察通過電機空間諧波引起的轉矩脈動。
圖5,汽車在平路上從0到60nph加速時間約為10s。設置load_veh_dyn symbol的地形屬性的值全部相等,能夠達到平路上運行的效果。

圖 5 汽車平坦地形上的仿真結果
由上圖可以看到,相電流的頻率與汽車的速度是成正比的,電流矢量的id值是負值,符合MTPA公式。
圖6表明,電機產生的反電動勢在5s時被電池電壓到極限,此后,電機處于弱磁控制模式,可以使速度進一步增加,但是理論值與實際值之間的誤差會增大。仿真結果同時表明,電機電流在達到設置的最大300A后被MTPA算法限幅。
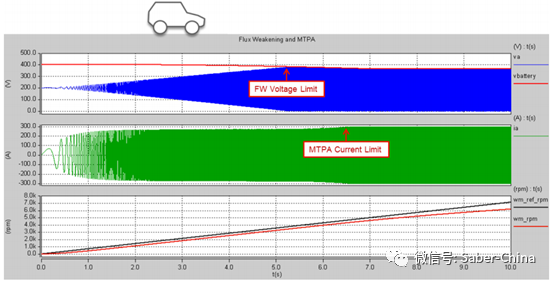
圖6 弱磁控制模式
圖7和圖8表示的是在斜坡段的汽車動力仿真。在下坡段,汽車加速度超過了所設置的值,電機產生反向扭矩,暫時表現為發電機。在該點,能量通過動力學,磁,電和化學反應等將能量回流到電池中,當扭矩過零點時可以看到反向電流的變化。
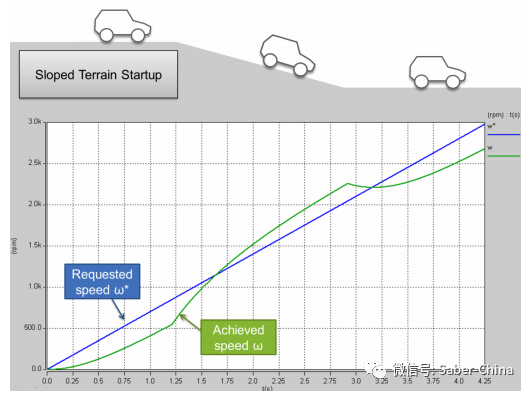
圖7 斜坡地形上速度響應
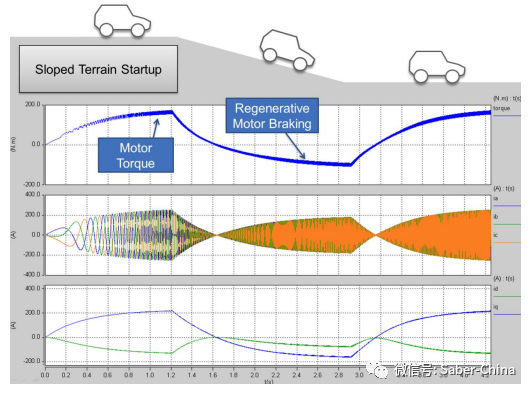
圖8 斜坡地形上扭矩和電流相應
為了證明這點,改變load_veh_dyn symbol地形屬性profile: [(0, 0), (1, 0), (10, -5)],再次進行仿真,觀察波形。
值得指出的是為了獲取dc工作點的參數,汽車的初始位置必須是無坡的。電機啟動時是沒有速度的,同時也不需要力矩。因為作用在汽車上力的平衡只能在沒有重力時去計算,所以如果要修改坡度參數,請確保x=0時是平坦的。
4、Level 3
該層電路使用了pwm逆變器模型,仿真速度會更慢,控制算法使用mast語言實現。

圖9 汽車電機驅動系統仿真電路(Level 3)
Level 3抽象了 PWM逆變操作,使用了理想的開關模型和二極管模型,仿真速度比Level 2慢。但是比使用實際的半導體模型的Level 4要快一個數量級。
PMSM模板使用了MAST語言模板,使用采樣信號替換了Level 2的連續信號。不同于Level 2輸出使用占空比循環,這種方法促使逆變器開關逐漸消去,使得他更加接近于一個真正的MCU,盡管如此,Level 3大部分操作還是和Level 2的一樣,包括派克變換和派克逆變換、MTPA、弱磁控制、PI集成和占空比計算。
控制系統不是通過異步中斷觸發開關裝置,而是在每個開關周期的開始時控制12個開關裝置(對于6個開關管,每個管子一次開一次關)。開關序列然后順序排在仿真事件隊列。在通信方案中,當系統在仿真外部FPGA、虛擬器等時,控制固定和相對長的時間間隔(200us)可以顯著提高系統仿真性能,它允許開關事件可以暫時停止,但是沒有大的損失。
如果不是用于協同仿真,系統的采樣頻率可以設置的高于開關頻率,提高采樣率可以使用kalman等濾波器對數據進行降噪,開關頻率和采樣頻率開關切換時間主要是基于占空比,占空比是通過基于直流母線電壓的電壓合成的比例。
計算占空比時也包括用戶指定的死區時間。死區時間是為了避免同時導通時,逆變器短路而定義的兩個互補的IGBT同時導通關閉和開啟之間一個很小的區間。死區時間一般為1到5us之間。

圖10 矯正和未校正死區失真
圖10所示的是,如果沒有死區時間補償,當一相電流過零(每個同步周期發生六次)時,死區時間引起的電流波形變化異常明顯。波形異常會導致增加THD水平和電機鐵芯損耗。在高頻PWM時,由于死區時間是固定的(取決于IGBT內部開關速度),切換周期中死區所占的占空比會增大,其效果會惡化。在低速同步開下,死區時間的影響也比較明顯。
死區時間的失真可以在電流的極性切換時刻進行校正調整。當IGBT的 同一條管腳都關閉時,相關的感應電流或者流經上續流二極管,或者流過下續流二極管。因為管腳的電流極性已經提前知道,所以可以提前知道相電壓是去零電壓還是母線電壓,有助于提前增加或減少占空比。
需要注意的是,控制開關當同一管腳的開關同時動作時的死區時間,這只會發生在當電流等于零附近。高于和低于一定的安全裕度(FOC參數i_margin),一對開關中只有一個開關是對主動控制的。
5、Level 4
Level 4抽象模板是原理圖底層電路,有著詳細的逆變器電路。但是仿真速度最慢。這層的仿真速度是上層仿真速度的1/20。逆變器特性是根據Infineon IGBT datasheet用IGBT工具搭建的。
Level 4的FOC控制是使用C語言來實現的,但是實現功能與Level 3的mast語言是一樣的。
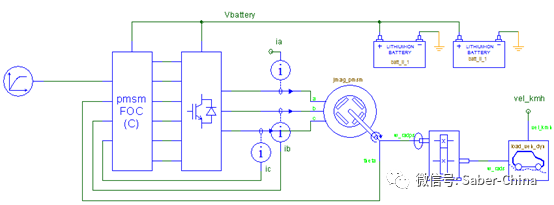
Level 4,逆變器使用實際元器件搭建,FOC算法使用C編譯器,c文件名稱為pmsm.c,它與Level 3的實現原理完全一樣。
5.1 Foc模塊

從foc模型描述可以看到架構與Level 3的一樣,只是算法調用了foc_pmsm.c文件。
5.2 逆變器
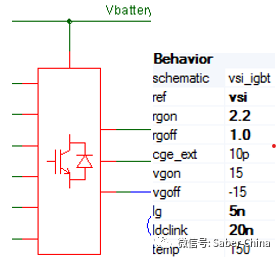
圖11 逆變器及其參數設置
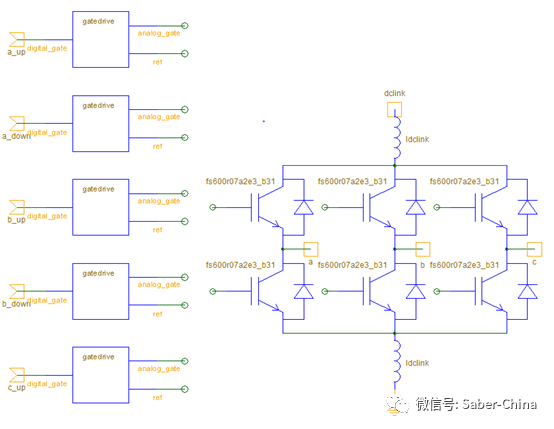
圖12 逆變器模型宏電路
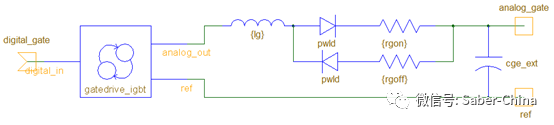
圖13 IGBT控制器模型宏電路
6、總結
本文介紹了在電機設計的不同階段中根據仿真精度和仿真速度的權衡,涉及了4種建模方法,它們的特點見下表:
- dp模型提供最高仿真速度,可以有效地進行循環仿真。該模型可以評估整體效率,評估負載平衡,評估電機管理策略,分析長時間工作熱仿真。
- averaged PWM model適用于電機控制(FOC或DTC)優化,分析驅動動態范圍,包括轉矩脈沖和由電機缺陷引入的振動。
- deal switch models適用于評估PWM方案(如正弦或空間矢量)和故障保護策略(熔斷器,冗余逆變器等)
- Detailed semiconductor models適用于評估逆變器的應力分析inverter stresses(最大dI/dt and dV/dt, 電壓和電流尖峰current spikes);適用于設計開關速度和死區時間最優的門驅動電路;這一層的模型產生供上層模塊調用的器件損耗表。

-
電動汽車
+關注
關注
156文章
12067瀏覽量
231101 -
永磁同步電機
+關注
關注
28文章
873瀏覽量
49529 -
逆變器
+關注
關注
283文章
4715瀏覽量
206690 -
PMSM
+關注
關注
14文章
246瀏覽量
41863 -
勵磁電流
+關注
關注
1文章
88瀏覽量
8524
發布評論請先 登錄
相關推薦
電動汽車性能分析方案之ADVISOR仿真模型
SaberRD基于JMAG電機模型的電動汽車動力系統仿真(一)
SaberRD基于JMAG電機模型的電動汽車動力系統仿真(二)





 工商網監
工商網監
評論